
利用单向喷射作用力控制的旋转弹控制方法*
2016-07-21 05:18邓溪语张春熹
现代防御技术 2016年2期
邓溪语,张春熹,b
(北京航空航天大学a.经济管理学院; b.仪器科学与光电工程学院,北京 100191)
利用单向喷射作用力控制的旋转弹控制方法*
邓溪语a,张春熹a,b
(北京航空航天大学a.经济管理学院; b.仪器科学与光电工程学院,北京100191)
摘要:一般情况下,对于在两维平面内运动的物体,如要任意改变它的运行轨迹,需沿两个不同方向施加可变的控制力。然而对某类沿固定轴恒速旋转的运动体,只需在一个方向施加作用力即可改变两维轨迹。首先从平面运动入手,推导了一种采用喷射力并基于旋转相位独立改变等效控制力大小与方向的单通道控制方法。进一步以旋转弹为背景,探讨了该方法在三维空间绕前进方向高速旋转物体中的应用。
关键词:等效控制力;单通道控制;喷射力;旋转弹;高速旋转;飞行器控制
0引言
对某类沿固定轴恒速旋转的运动体,只需在一个方向施加作用力即可改变两维轨迹,因此在近程旋转导弹[1]中,可以采用单通道控制方式即采用一字舵面或采用径向侧喷发动机同时控制导弹的俯仰和偏航2个方向的空间运动,控制弹体沿期望的弹道飞行[2]。
对于旋转弹的单通道控制[3],如何获得改变运动轨迹所需大小和方向的周期平均控制力,是实现旋转弹有效控制必须研究的问题,文献[4-5]分别基于一字型舵和十字型鸭翼布局舵机结构,提出了旋转一周舵机换向4次的等效控制力形成方法,本文在推导了用单向喷射作用力控制旋转物体运动轨迹的原理的基础上,提出了一种旋转一周单向喷射控制力不等间隔换向2次的控制方法[6],减少了开关次数,简单可行。
1旋转运动体单向作用力控制原理

(1)
(2)
如果希望运动体进行加减速,甚至进行转弯,那就需要对其施加作用力。如图1所示,定义一个新的坐标系O1x1y1,与运动体固连,假设此时O1x1方向正好与其速度方向相同(实际上可以不同)。这样,通过力Fx1,Fy1可以产生相应方向的加速度ax1=Fx1/m,ay1=Fy1/m,其中m为质量。
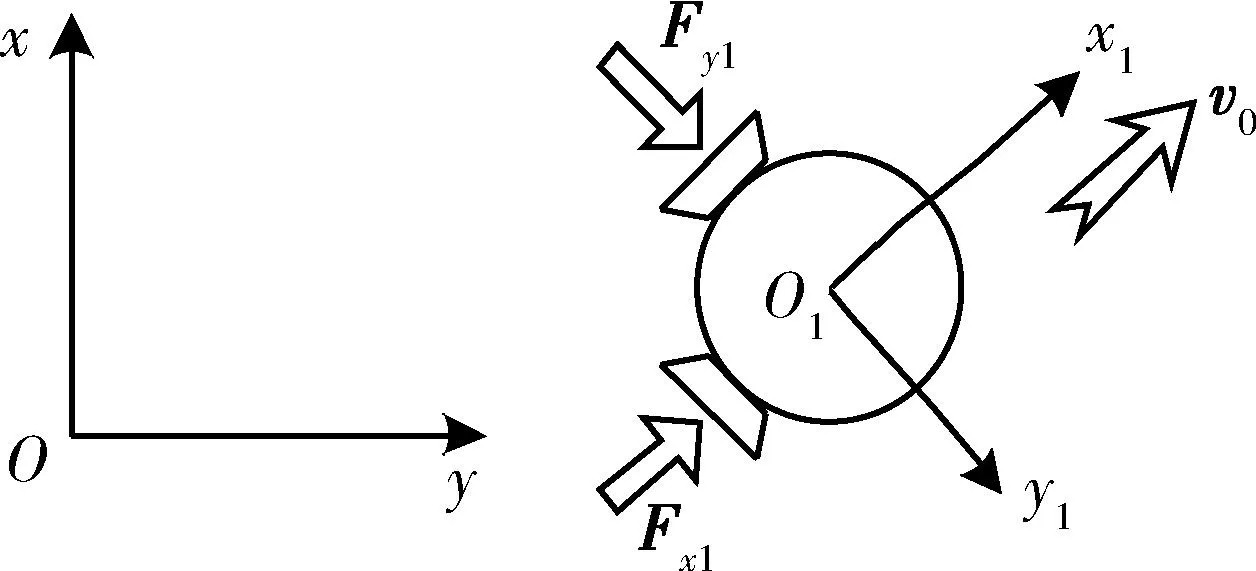
图1 两作用力控制两维轨迹示意图Fig.1 Illustration of two dimensional trajectory controls with two forces
设一开始就施加恒定作用力Fx1,Fy1,则物体的运动学方程为
(3)
(4)
(5)
上述是通过施加2个不同方向的外力对物体两维轨迹进行控制,实际上,当运动体本身在快速旋转时,只需要施加一个方向外力即可控制二维平面运动。
两坐标系仍按前述定义,物体以角速度ω沿顺时针方向旋转,控制力为F,初始时F与Ox轴夹角为α,如图2左所示。将任意时刻t的控制力分解到惯性坐标系,表示为
(6)
如果控制力旋转一周不变,如图2右示,则显然等效控制力为0。

图2 单作用力控制示意图Fig.2 Schematic diagram of single force control
假设控制力在旋转一周的过程中存在变化,如在某一位置关闭,在另一位置开启。假设开启、关闭的相角分别为α,α+π,如图3所示。
设T=2π/ω为旋转周期,等效控制力的计算表示为
(7)
对式(7)进行求解得

(8)

(9)
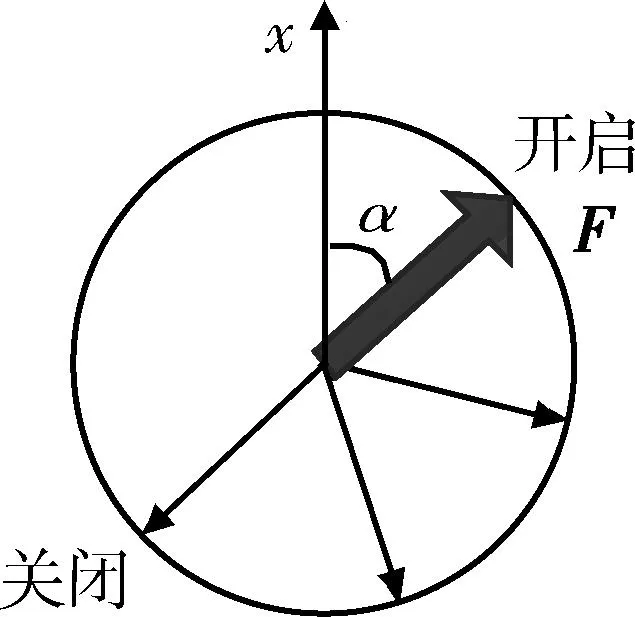
图3 单作用力开启-关闭控制示意图Fig.3 Schematic diagram of single force control
上述分析表明:在作用力大小恒定的情况下,等效控制力的大小为F/π,方向与Ox轴夹角为α+π/2,可通过调节α进行改变。若控制力大小不变但方向可以反向的情况,这样控制力有3种工作状态:正向推力、零、负向推力,但仍为在同一直线方向的作用力。结合前面的例子,在原开启、关闭相位处进行换向,会发现等效控制力大小增加为之前的2倍,但大小依然无法随意改变。
任意改变等效控制力大小和方向,可以采用4次换向方法。如果4次换向的相位分别为α,α+π/2,α+π和α+3π/2,如图4a)所示,那么4个区间产生的控制力将互相抵消,等效控制力仍将为0;考虑将第2,4次换向的相位进行调整,分别设计为α+π/2+β和α+3π/2-β,如图4b)所示。
a)等间隔4次换向示意图 b)不等间隔4次换向示意图图4 单向作用力4次换向控制示意图Fig.4 Schematic diagram of single force control


(10)
同理可以解得

(11)
因此采用上述方法,等效控制力的大小为

(12)
等效控制力相位为
θc=α+π/2.
(13)
等效控制力大小可由进行调整;方向可由进行调整。
实际上通过两次换向,同样可以改变等效控制力的大小和方向。在图3基础上,改变第二次换向的相位角,使正负向推力作用时间不等,取两次换向的相位角分别为α,α+π+β,如图5所示。

图5 单作用力不等间隔2次换向控制示意图Fig.5 Schematic diagram of single force unequal intervals secondary commutation control
(14)
(15)
等效控制力大小为

(16)
等效控制力相位为

(17)
即可以通过α,β对等效控制力的大小和方向进行调节。
以上推导得到了一种用单向作用力控制两维轨迹的方法:在一个旋转周期内进行2次不等间隔换向,通过改变换向的相位角β实现对等效控制力大小的调整,配合α调整力的方向,最终实现对等效控制力大小与方向的控制。具体控制实现时,首先由期望的等效控制力幅值Fc解算得到相位角:

(18)
然后由期望的等效控制力方向及得到另一相位角:
(19)
2一种旋转导弹单向喷射作用力轨迹控制方法
旋转弹[7-8]是指一类在飞行过程中绕弹体纵轴保持持续滚动状态的飞行器,这种持续的滚动状态可以使弹体在飞行过程中更加稳定,简化其控制系统,降低生产成本,还可以克服因为加工、组装误差造成的发动机推力偏心、弹体受力不对称等问题[9-10]。本文采用单向喷射控制力来实现对旋转导弹的控制,在旋转弹尾部安装喷射装置,该装置具有相背配置的两个喷管,其轴线垂直于弹体纵轴[11-12],通过控制阀门使喷管交替打开或关闭。当控制信号控制某个喷管开启工作时,该喷管[13]产生垂直于弹体纵轴的侧向推力。旋转一周后得到的等效控制力对俯仰、偏航2通道产生机动力矩使弹体偏转,由高速气流建立相应法向力,进而产生改变弹体飞行轨迹的加速度,实现对飞行弹道的控制。就运动轨迹维数来看,该方法提供了对该类运动体两个维度的控制作用,与导弹前飞速度结合后可实现三维轨迹控制[14]。
定义一个辅助坐标系O2x2y2z2,其不随弹体滚转,与弹体固连坐标系O1x1y1z1夹角为滚转角φ。应用前述方法,采用单方向喷射作用力(图6b)实现控制,其喷射力一般比舵面控制力(图6a)产生速度更快,有利于提高控制性能[15]。随着弹体滚转,在α,α+π+β位置处控制力进行2次换向,或者在α,α+π/2+β,α+π和α+3π/2-β位置处控制力进行4次换向,如图7所示。根据之前的讨论,旋转一周的等效控制力大小、方向随α,β可变。在此力控制下,弹体发生偏转,在高速气流作用下产生沿相应方向的法向力,改变两维运动轨迹。

图6 旋转弹控制示意图Fig.6 Schematic diagram of rolling airframe control

图7 旋转弹单向作用力控制示意图Fig.7 Schematic diagram of unidirectional rotating force control bomb
3仿真校验
设导弹自旋频率为fc=20 BZ,喷射装置推力幅值为Fg,不考虑控制信号到喷射装置推力输出延时、推力响应特性等因素,得到等效控制力的仿真结果如下。
(1) 旋转一周控制力不等间隔换向2次(图8,9)
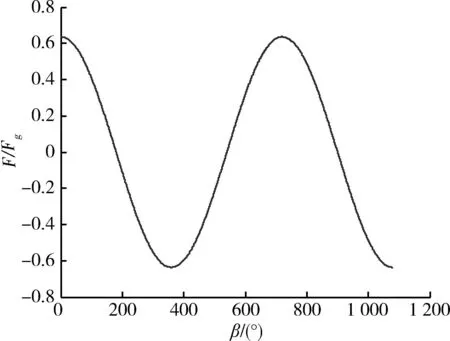
图8 α=0°时等效控制力幅值与β的关系曲线Fig.8 Relation curve about the equivalent amplitude control and β while α is 0°

图9 β=50°时等效控制力相位与控制信号初始相位关系曲线Fig.9 Relation curve about the equivalent control phase and the initial phase of control signal While β is 50°
(2) 旋转一周控制力不等间隔换向4次(图10,11)

图10 α=0°时等效控制力幅值与β的关系曲线Fig.10 Relation curve about the equivalent amplitude control and β while α is 0
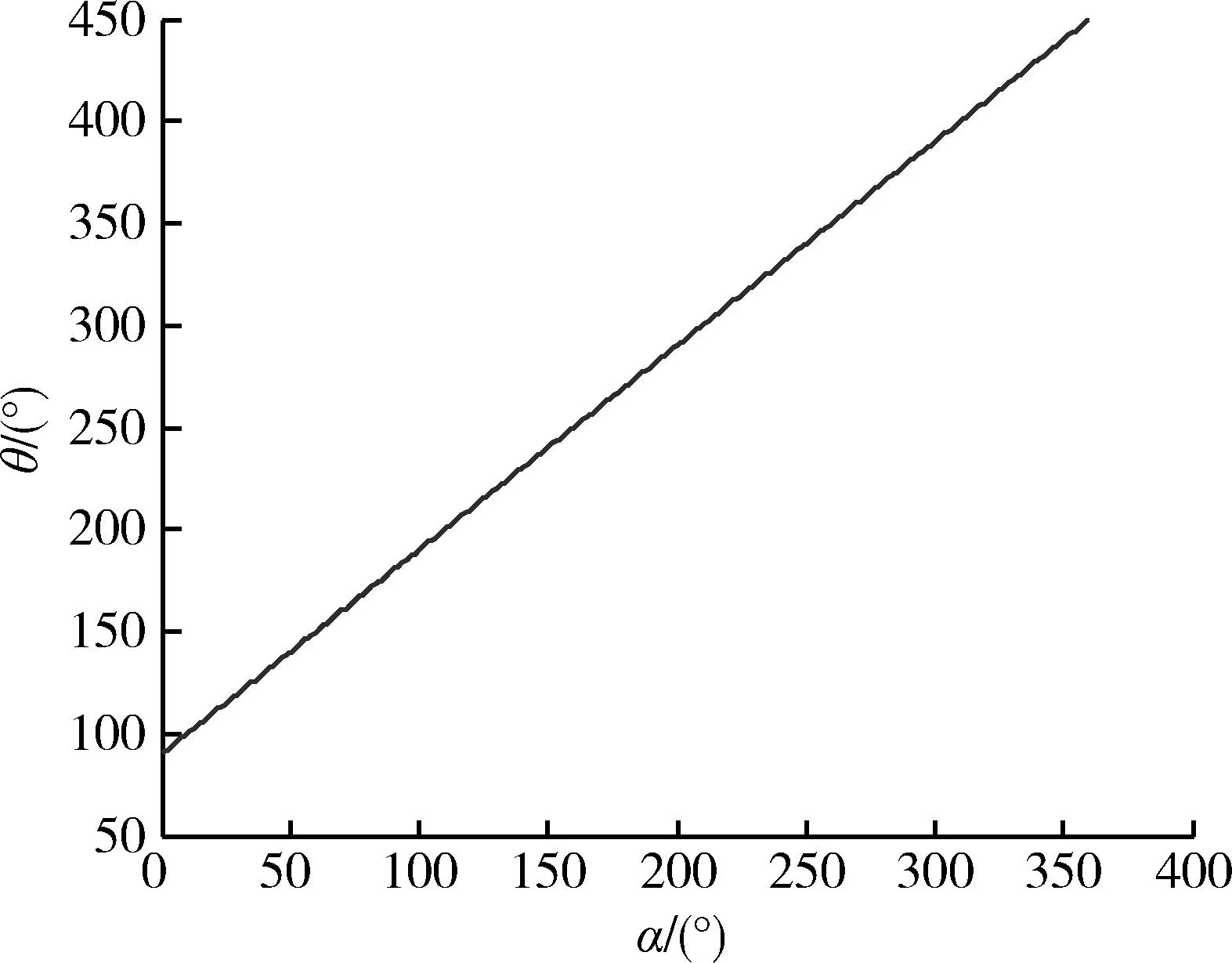
图11 β=50°时等效控制力相位与控制信号初始相位关系曲线Fig.11 Relation curve about the equivalent control phase and the initial phase of control signal while β is 50°
图12,13给出了利用不等间隔换向2次的方法控制旋转弹跟踪设定轨迹的仿真结果,仿真结果表明跟踪精度良好,在同样的条件下,控制力不等间隔换向两次能减少喷射装置开关次数,更加简单。
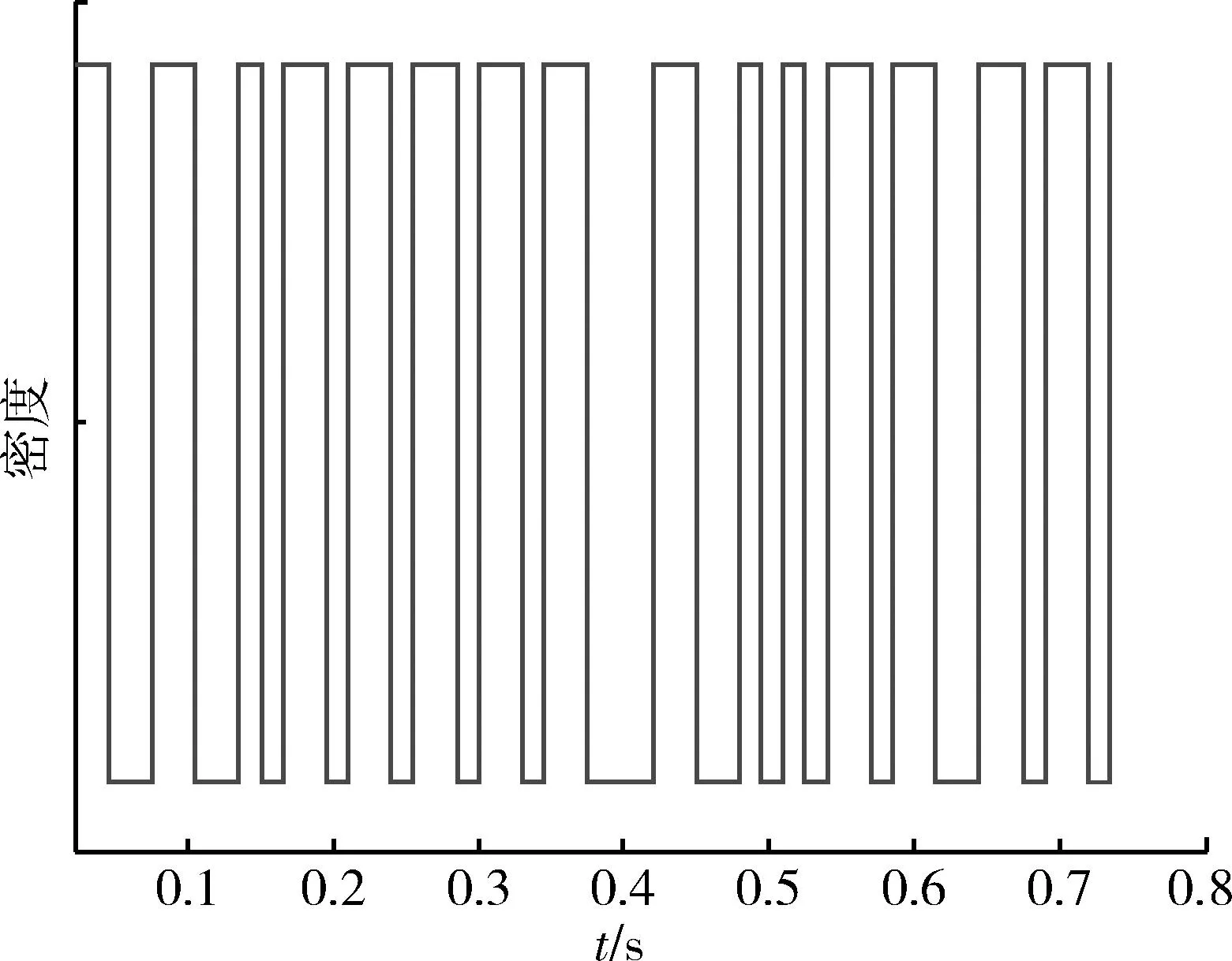
图12 控制信号Fig.12 Control signal
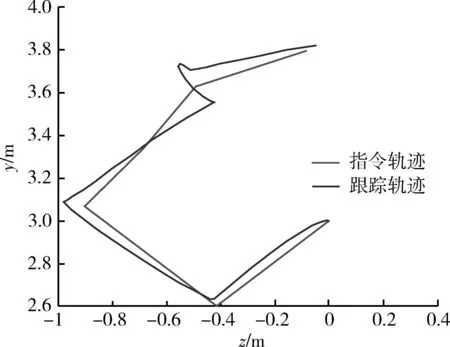
图13 弹体yz平面运动轨迹Fig.13 yz plane trajectory of the elastomer
4结束语
本文针对旋转物体单向喷射作用力控制二维轨迹运动问题,研究了通过设计控制力换向的相位角,对等效控制力的大小和方向分别进行独立控制的方法,并提出了旋转一周控制力不等间隔换向2次的控制方法,该方法可以改变等效控制力的大小和方向,应用于旋转导弹的控制,可以减少舵机或发动机动作次数,相比普遍采用的旋转一周控制力不等间隔换向4次的方法,该方法简单易行。
参考文献:
[1]张锐,李君龙. 旋转弹制导技术的研究 [J]. 航天控制,2005(3):43-45.
ZHANG R, LI J L. Research on the Guidance Technology of Rolling Airframe Missile [J], Aerospace Control 2005(3):43-45.
[2]JUN B E. An Effective Integral Control Law for Rolling Airframe Missiles with a Single Plane of Control Surfaces [C]∥Control Automation and Systems (ICCAS), 2013, 13th International Conference on. IEEE, 2013: 66-71.
[3]WILSON R F, CLOUTIER J R. Lyapunov-Constrained Eigenstructure Assignment for the Design of Robust Mode-Decoupled Roll-Yaw Missile Autopilots [C]∥Control Applications, 1992, First IEEE Conference on. IEEE, 1992: 994-999.
[4]YU Y, ZHANG J. Use Roll Actuator to Reduce Coupling of BTT Missile [C]∥Systems and Control in Aerospace and Astronautics, 2008, ISSCAA 2008. 2nd International Symposium on. IEEE, 2008: 1-4.
[5]杨荣军. 旋转制导炮弹飞行弹道及控制系统设计方法研究[D].南京:南京理工大学,2012.
YANG Rong-jun. Rotate Round Flight Trajectory and Control System Design Method Research [D].Nanjing: Nanjing University of Science and Technology, 2012.
[6]TALOLE S E, GODBOLE A A, KOLHE J P, et al. Robust Roll Autopilot Design for Tactical Missiles [J]. Journal of Guidance, Control, and Dynamics, 2011, 34(1): 107-117.
[7]郭常春. 旋转导弹单通道控制系统研究[D].哈尔滨:哈尔滨工程大学,2006.
GUO Chang-chun. Rotating Missile Single Channel Control System Research [D].Harbin: Harbin Engineering University, 2006.
[8]ELKO E C, HOWARD J W. Rolling Airframe Missile: Development, Test, Evaluation, and Integration [J]. Johns Hopkins APL technical digest, 2001, 22(4): 573-582.
[9]吴雄,张为华,王中伟. 气体二次喷射推力向量控制数值仿真[J]. 北京航空航天大学学报,2007(1):42-45.
WU Xiong,ZHANG Wei-hua,WANG Zhong-wei. Secondary Gas in Jection Thrust Vector Control Numerical Simulation [J]. Journal of Beihang University, 2007(1):42-45.
[10]DECARLO R A, BRANICKY M S,STEFAN PETTERSSON, et al. Perspectives and Results on the Stability and Stabilizability of Hybrid Systems [J]. Proceedings of the IEEE, 2000, 88(7): 1069-1082.
[11]祝强军. 弹道导弹弹道仿真与优化设计[D].西安:西北工业大学,2007.
ZHU Qiang-jun. Ballistic Trajectory Simulation and Design Optimization[D].Xi’an: Northwestern Polytechnical University, 2007.
[12]易文俊,王中原,李岩,等.带鸭舵滑翔增程炮弹飞行弹道研究[J]. 弹箭与制导学报,2007,27(1):150-153.
YI Wen-jun,WANG Zhong-yuan,LI Yan,et al. Canard Flying Gliding Range Ballistic Research band [J]. Journal of Projectiles,Rockets,Missiles and Guidance, 2007, 27(1):150-153.
[13]张萌,马铁华,曹咏弘,等. 旋转弹导航系统研究[J]. 兵工学报,2008,30(7):793-797.
ZHANG Meng, MA Tie-hua, CAO Yong-hong, et.al. Rolling Airframe Navigation System [J].Acta Armamentarii,2008,30(7):793-797.
[14]S.M.Seltzer. Development of U.S Army Advanced Missle Guidance and Control System[C]∥AIAA 1980 International Meeting And Display,1980.
[15]路永乐,潘英俊,黎蕾蕾,等. 采用双轴加速度计的旋转弹运动姿态角速率测量方法[J]. 中国惯性技术学报,2015,23(2):160-164.
LU Yong-le, PAN Ying-jun, LI Leilei,et.al. Biaxial Accelerometer Rotation Angular Velocity Projectile Motion Attitude Measurement Method [J] Chinese Inertial Technology , 2015,23(2):160-164.
Pitching and Yaw Control of a Moving Object Using Unidirectional Lateral Jet
DENG Xi-yua, ZHANG Chun-xia,b
(Beihang University,a.The High college affiliated to Renmin University;b. college of Instrumentation Science and Optoelectronics Engineering, Beijing 100191, China)
Abstract:In general, two variable forces along different directions are needed for an object moving in a plane to generate arbitrary trajectories. While only one force is needed for a kind of object rotating along a fixed axis at a constant angular rate. A single channel control method using jet thrust is derived for planar motion at first. The magnitude and direction of equivalent control force could be changed independently via rotational phase regulation. Furthermore, the method is extended to object rotating about its advancing direction at a high angular rate in three-dimensional space, like spinning missiles.
Key words:equivalent control force;single-channel control;ejection force;rolling airframe missiles;high-speed rotation;aircraft control
*收稿日期:2015-11-23;修回日期:2016-02-15
作者简介:邓溪语(1997-),女,湖南株洲人。本科生, 研究方向为导航与制导技术。
通信地址:北京市海淀区学院路37号北航经济管理学院E-mail:yhxb@vip.163.com
doi:10.3969/j.issn.1009-086x.2016.02.016
中图分类号:TJ765.2
文献标志码:A
文章编号:1009-086X(2016)-02-0097-04
导航、制导与控制
