超静平台隔振与指向一体化控制方法
2016-07-20 10:21:36王有懿何英姿
航天控制 2016年6期
王有懿 汤 亮 何英姿
1. 北京控制工程研究所, 北京 100190 2. 空间智能控制技术重点实验室, 北京 100190
超静平台隔振与指向一体化控制方法
王有懿1,2汤 亮1,2何英姿1,2
1. 北京控制工程研究所, 北京 100190 2. 空间智能控制技术重点实验室, 北京 100190

未来航天任务对航天器的控制精度和稳定度提出了极高要求,亟需研制具有振动隔离和精确指向功能的有效载荷超静平台。基于此研究超静平台的隔振与指向一体化控制方法,以满足未来航天器的高性能需求。借助一般形式的超静平台动力学模型,分别推导了适用于振动隔离与精确指向控制的2种解耦模型,并给出相应的控制策略;结合2种控制方法的不同控制带宽,研究超静平台隔振与指向一体化控制方法,实现超静平台的宽带宽控制;进行数值仿真分析。仿真结果表明:采用隔振与指向一体化控制方法可以在宽频率范围有效抑制外部扰动,同时实现对观测目标的精确跟踪。
超静平台;振动隔离;精确指向;一体化控制
未来的航天任务(如空间科学观测、深空激光通信等)要求航天器具有极高的控制精度和稳定度性能指标;而星上的各种扰动源,如飞轮、控制力矩陀螺、大型天线及太阳帆板的定向驱动装置、斯特林制冷机等正常工作时将会产生难以避免的低频振动和高频抖动,严重影响高精度航天器的控制精度和稳定度性能指标,明显降低有效载荷的工作性能。
针对上述问题,国外自上世纪90年代开始研究一种安装于卫星本体和有效载荷之间,具有振动隔离和高精度指向控制的有效载荷搭载平台,称之为“超静平台”[1],以满足未来航天任务的需求。随后,国内外研究机构和学者致力于超静平台的主动隔振和指向控制相关方面的深入研究。Geng和Hayes[2]采用自适应FIR前馈控制方法最小化加速度以此实现超静平台的主动振动隔离,在他们的研究中,力和加速度传感器被作为测量敏感器单独或组合使用。Hyland等[3]基于经典控制方法使用基础端和载荷端加速度传感器相结合的方式实现了超静平台的主动振动控制。基础端加速度控制回路提供输入扰动的前馈补偿,而有效载荷端的加速度回路用于稳定有效载荷。Thayer等[4]利用一系列传感器,包括三轴力传感器,LVDT位移传感器以及有效载荷端和基础端检波器速度传感器,基于零极点配置的结构模型,采用MIMO控制方法研究了超静平台的控制问题。Mclnroy等[5]基于超静平台的小位移假设条件,研究了一种适用于控制的解耦算法,超静平台多输入多输出系统(MIMO)被解耦成6个单输入单输出系统(SISO),进而采用经典的控制方法进行分析。在国内,仇原鹰等[6]针对柔性支撑超静平台提出了一种自适应交互PID隔振控制方法,杨涛等[7]提出了一种超静平台的L2控制方法进行主动隔振。刘磊等[8]基于鲁棒控制方法研究了超静平台的六自由度主动隔振问题。针对星上微振动扰动的影响,李伟鹏等[9]采用具有加速度反馈的PFF和Skyhook相结合的控制方法研究了超静平台对星上微振动的主动隔离/抑制问题。
上述基于超静平台的振动隔离和指向控制问题一直以来大多被分开研究。但对于未来空间观测、激光通信等航天器的高精度性能需求,单一的隔振和指向控制已无法满足指标要求,需要超静平台同时具备振动隔离和主动指向控制能力。
基于此,本文研究了超静平台隔振与指向一体化控制方法。首先,对一般形式的超静平台动力学模型进行解耦,推导并获得了用于振动隔离和指向控制的解耦模型,并分别研究了相应的主动隔振和指向控制策略;在此基础上,研究超静平台隔振与指向一体化控制方法,采用加速度或力反馈实现中高频振动的隔离与抑制,采用位移反馈抑制低频扰动,并对观测目标提供精确指向,两者结合实现超静平台的宽带宽控制。最后,针对理论研究成果进行数值仿真分析。
1 超静平台振动隔离和指向控制
图1给出了一般构型超静平台的结构形式,其由基础平台、有效载荷平台和6个相同的可伸缩支杆组成。支杆通过两端的柔性铰与基础平台和载荷平台连接。其中,pi(i=1,2,…,6)为6个支杆与载荷平台的连接铰点,bi(i=1,2,…,6)为6个支杆与基础平台的连接铰点。
针对图1所示的一般构型超静平台,分别推导2种用于主动隔振和指向控制的解耦模型,并给出相应的主动振动隔离和指向控制策略。

图1 一般构型超静平台
1.1 超静平台动力学模型解耦
在超静平台的支杆空间中,一般形式的超静平台动力学模型为[10]:

(1)

在式(1)的基础上,定义一个新的输入变量u1和新的输出变量y:
u1=JΤfm,y=J-1l
(2)
将式(2)中的y求2次导数(由于柔性铰形式超静平台在进行微振动主动隔振和高精度指向微调节过程中,仅仅具有较小的运动范围,因此项可忽略),并代入式(1)中得:

(3)
由于Ms,C,K为带系数相乘的单位阵,并假设科氏项和向心项以及重力项可通过前馈控制予以补偿,则式(3)可变为:

(4)
此外,定义另一种新的输入变量u2和新的输出变量y:
u2=J-1fm,y=J-1l
(5)
得到另一种解耦方程为:

(6)
由式(4)和(6)可知,实现超静平台动力学模型的解耦需满足以下条件:
2)超静平台的几何构型和载荷质心在平台的位置需要严格设计,即:超静平台采用支杆相互正交的立方体构型,并且有效载荷的质心和正交支杆形成立方体构型的中心重合,此时JΤJ为对角阵[5]。
上述新定义的2个输入输出变换式(2)和(5)通过将超静平台的多输入多输出控制变换为单输入单输出控制,从而更为有效地抑制载荷端和基础端的扰动。2种变换具有同样的输出y=J-1l,其既可以通过超静平台工作空间中的传感器直接测量y,也可以通过支杆空间中的传感器间接测量l获得。变换式(2)把支杆中的作动器输出力变换为作用于有效载荷质心的力Fm=JTfm,特别适用于载荷工作空间的力控制。另一方面,变换式(5)将支杆空间的轴向运动变为载荷工作空间的位姿变化,因而特别适用于载荷工作空间的位置控制。
基于上述2种超静平台解耦动力学模型,进一步研究超静平台的主动隔振和指向控制策略。
1.2 主动振动隔离策略
采用式(4)所示的解耦算法,超静平台的主动隔振控制策略如图2所示。
当超静平台满足1.1节的解耦条件时,超静平台的多输入输出(MIMO)系统被解耦成6个独立的单输入单输出(SISO)线性时不变系统,进而实现解耦控制。通过安装在超静平台6个支杆中的力或加速度传感器测量振动力或加速度信号,提供给6个独立的SISO控制器,进而采用积分加速度或积分力反馈控制方法,分别控制6个支杆中的作动器实现超静平台的主动隔振。由于用于主动隔振控制测量的加速度或力传感器具有较好的中高频特性,因此通过主动隔振控制策略可以有效抑制超静平台的中高频扰动。
1.3 精确指向控制策略
超静平台的精确指向控制,即运动控制,是指超静平台对观测目标的精确指向和跟瞄,一般仅涉及2个转动自由度。通过式(6)所示的解耦方法将超静平台的指向控制解耦成2个独立的单输入单输出(SISO)控制。精确指向控制策略如图3所示,解耦矩阵D由关联支杆空间运动和载荷空间运动的雅克比变换矩阵J对应于指向自由度的列组成,D一般为6×2维矩阵。超静平台的精确指向控制是指通过超静平台载荷端的指向传感器(如差分式电涡流位移传感器或PSD位置传感器)的测量结果,设计2个独立的单输入单输出SISO控制器,进而由解耦矩阵D将控制量分配到各个支杆作动器实现超静平台对观测目标的精确指向。由于用于精确指向控制的位移传感器低频性能好,因此,超静平台通过精确指向控制能够在消除低频干扰的同时,完成对观测目标的精确指向与跟瞄。
2 超静平台隔振与指向一体化控制
未来航天器的高精度性能指标要求超静平台同时具备主动隔振与精确指向控制的能力,在对低、中和高频干扰有效隔离与抑制的同时,实现对观测目标的精确指向和跟踪。
根据第1节中推导的2个解耦动力学模型式(3)和(6),当超静平台进行主动隔振和精确指向一体化控制时,需要综合位置和力控制2种方式,此时支杆作动器输出力为:
fm=J-Tu1+Ju2
(7)
特别适合于超静平台隔振与指向一体化控制,加速度或力传感器测量反馈产生的控制输入u1能实现超静平台中高频振动的振动隔离与抑制,而载荷指向敏感器测量反馈产生的控制输入u2能实现超静平台的低频扰动抑制和精确指向调节。
根据指向位移传感器具有低的测量带宽以及加速度或力传感器低频特性差的特点,对超静平台的控制带宽按频率区间进行分配,划分如下:
1)低频扰动抑制和观测目标跟瞄通过低带宽指向传感器(如差分式位移传感器和PSD传感器等)测量反馈予以实现;
2)中频扰动通过带通传感器(如加速度和力传感器)测量反馈予以控制;
3)高频抖动通过被动隔振方式(设计支杆刚度k)予以实现。

图2 主动振动隔离策略

图3 精确指向控制策略
基于此,超静平台隔振与指向一体化控制策略如图4所示。图4所示的控制策略包括振动控制(力控制)和精确指向控制(位移控制)2个控制回路,2个回路同时工作进一步提升超静平台的主动隔振与精确指向性能。在图4中,G为超静平台在支杆空间中由作动器输出力到支杆长度的传递函数,且G=[(J-ΤMxJ-1+Ms)s2+Cs+K]-1;解耦矩阵D6×2=J(a,p),式中a=[1 2…6],p=[4 5];变换矩阵D′=J-1(p,a),CI(s)为6个用于主动隔振控制的SISO控制器传递函数,CP(s)为2个用于精确指向控制的SISO控制器传递函数。综上所述,超静平台的隔振与指向一体化控制是在上述控制系统架构的基础上,最终通过设计隔振控制器和指向控制器予以实现的。
3 仿真算例与分析
针对上述研究的超静平台隔振与指向一体化控制方法,进行数值仿真分析与验证。仿真参数为:支杆与载荷平台连接铰点坐标为(载荷平台坐标系):
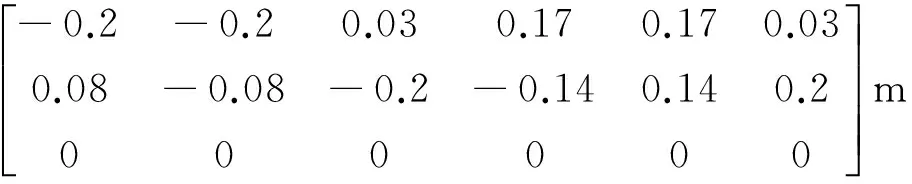
支杆与基础平台连接铰点坐标为(基础平台坐标系):
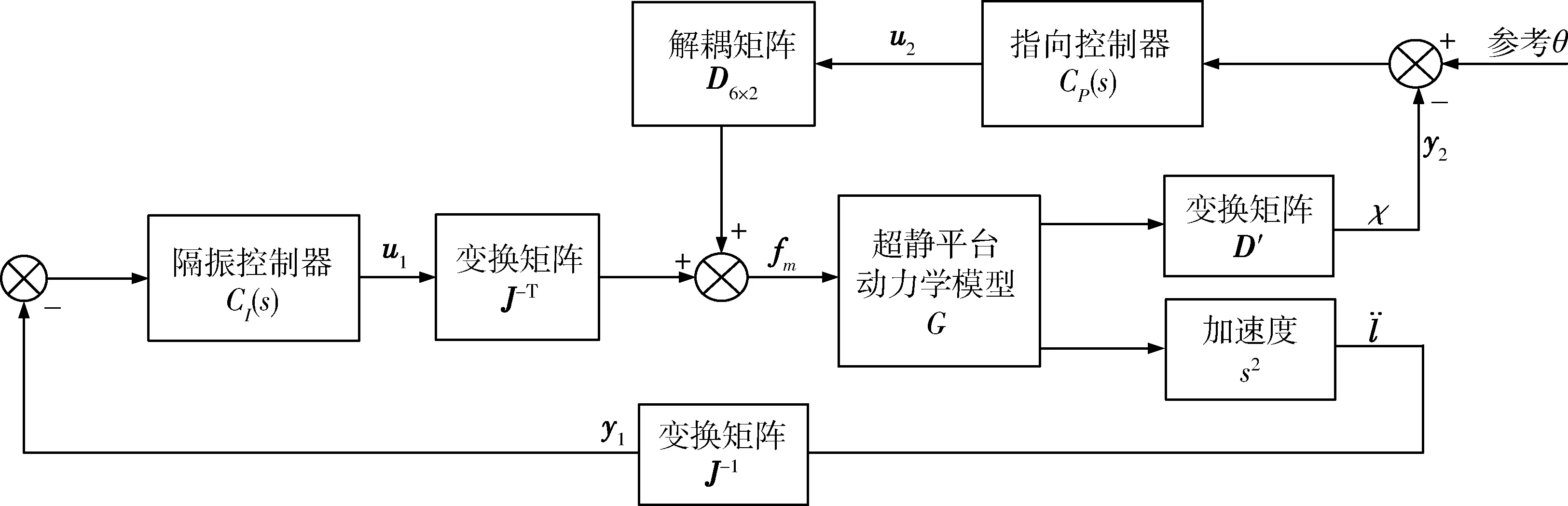
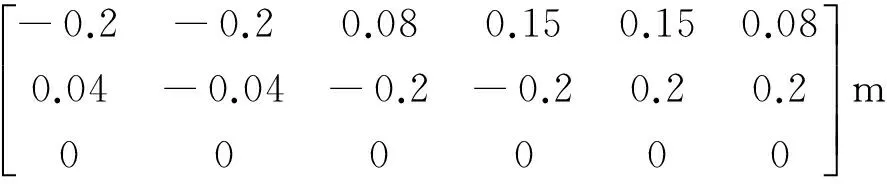
图4 隔振与指向一体化控制策略
平台高度h=0.03m,载荷质心在基础平台坐标系中的位置为[0 0 0.05](m);支杆质量Ms=0.1kg, 支杆的刚度和阻尼系数分别为K=3700Ν/m,C=2.7Ν·s/m;载荷质量/惯量矩阵Mx=diag{18,18,18,0.4,0.6,0.6}。
在超静平台的每个支杆基础端加入扰动分别为:
低频扰动:0.01×sin(0.2πt)m/s2;
高频扰动:0.001×sin(120πt)m/s2;
随机扰动:均值为0,方差为0.01的正态分布随机数。其仿真结果如下。
图5给出了开环和仅采用主动隔振方法,目标指向角θx响应的对比图。图6为开环和采用隔振与指向一体化控制方法,目标指向角θx响应的对比图。
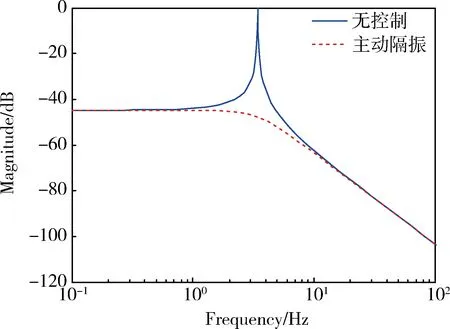
图5 开环与主动隔振方法对比图
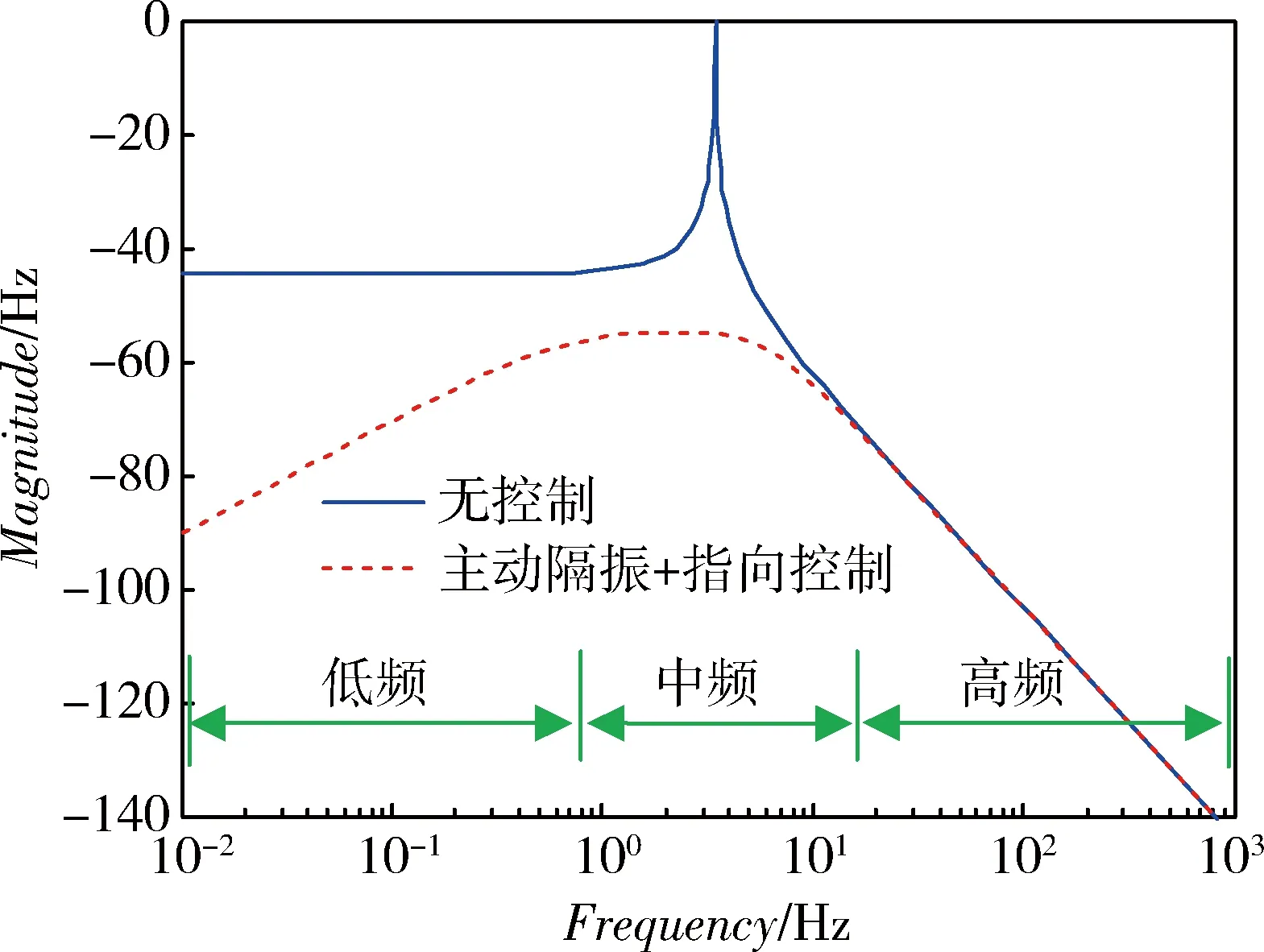
图6 开环和隔振与指向一体化控制对比图
由图5的仿真结果可得:超静平台在未施加任何控制的情况下,通过设计超静平台支杆的刚度k,可以实现目标指向角θx高频抖动的抑制,但其在中频共振频率附近存在着较大峰值;此时通过加入主动隔振控制,可以在保证高频抖动抑制的同时,明显降低中频段的共振峰值,然而仅加入主动隔振方法,低频控制效果没有得到改善。在上述基础上,通过加入指向控制,形成隔振与指向一体化控制,如图6所示,改善了低频扰动的抑制和指向控制效果,进而实现了超静平台的宽频带控制。
图7给出了超静平台需要追踪的目标指向和基础扰动(包含低频、高频和随机)作用下无控制时的指向结果。其中,无控制时的追踪效果是由于对超静平台的被动刚度进行一定的主动补偿实现的。图8~10分别给出了基础端存在低频、高频以及随机扰动作用时,仅主动隔振、仅指向控制以及隔振与指向一体化控制的控制效果对比图。
从图7中的仿真结果可以看出:在超静平台支杆基础端外部扰动(包含低频、高频和随机)的作用下,超静平台无法实现对目标指向的精确跟踪,并且超静平台实际指向和目标指向存在常值偏差。当仅采用主动隔振控制时,如图8所示,对于所受的中高频以及随机扰动实现了振动隔离与抑制,但无法实现低频振动的控制和对目标指向的精确跟踪,此时超静平台实际指向和目标指向常值偏差仍然存在。而仅采用主动指向控制时,如图9所示,消除了超静平台实际指向和目标指向的常值偏差,实现了对指向目标的跟踪,但无法完全消除基础端随机扰动的影响。当采用隔振与指向一体化控制方法时,如图10所示,即使在超静平台各支杆基础端存在宽频带扰动(包含低频、高频和随机)时,超静平台也能实现对目标指向的精确跟踪。

图7 外部扰动作用下无控制效果图

图8 主动隔振效果图
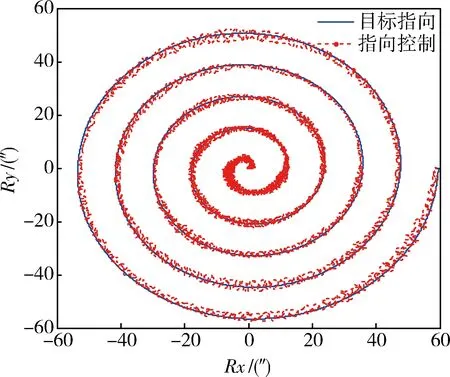
图9 主动指向控制效果图
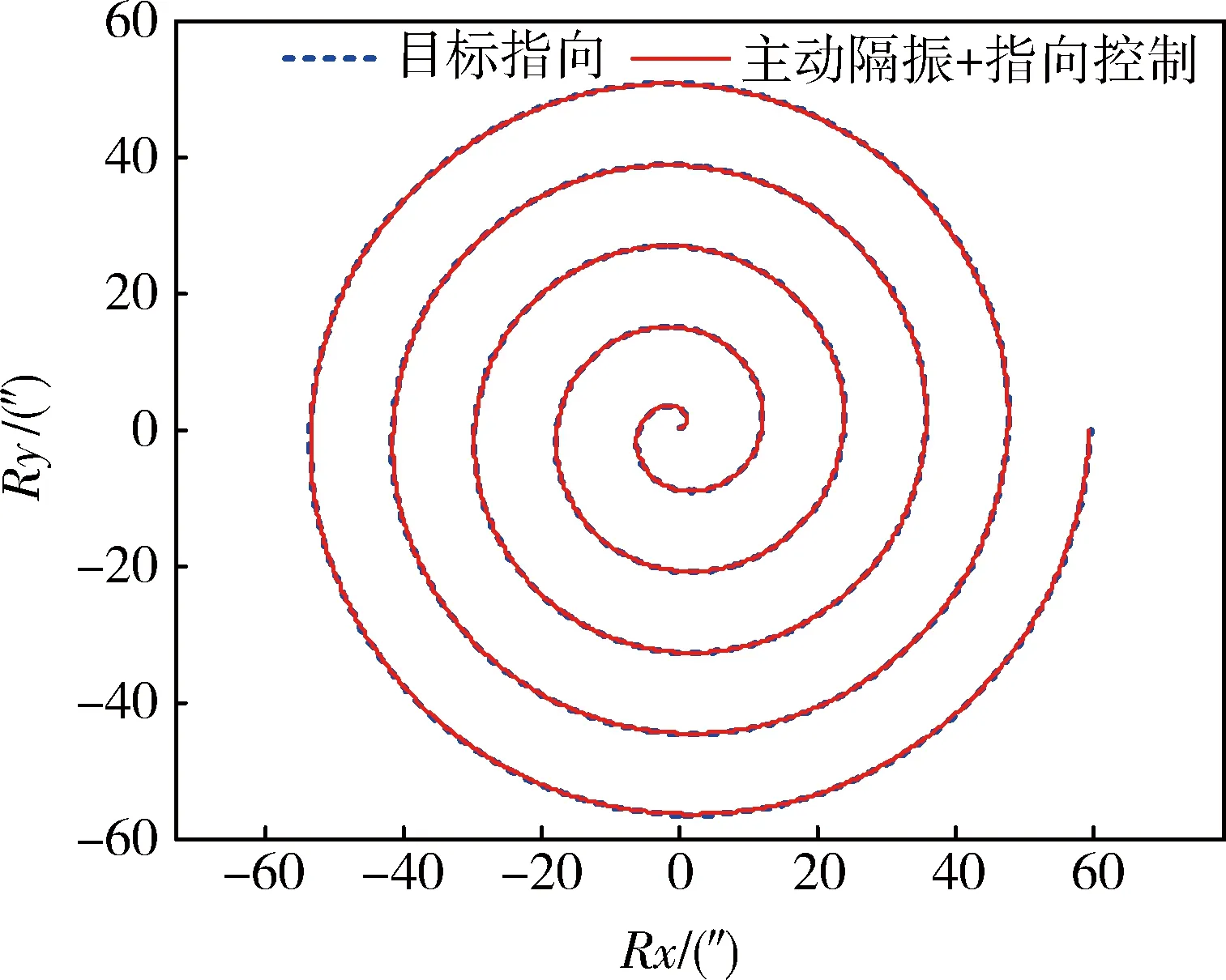
图10 隔振与指向一体化控制效果
4 结论
以超静平台在未来高精度航天器中的应用为背景,研究了超静平台的隔振与指向一体化控制方法,以此实现未来航天器的高精度指向要求。通过本文的研究,获得的主要结论为:
1)基于一般形式的超静平台动力学模型,推导并获得了适用于主动隔振与精确指向控制的解耦动力学模型,并给出了2种相应的控制策略;研究表明:在满足本文所述的超静平台和载荷设计要求时,所推导的解耦模型将会极大地简化控制器的设计;
2)结合主动隔振与指向控制的不同控制带宽,研究超静平台隔振与指向一体化控制方法,最终实现超静平台的宽带宽振动控制;
3)数值仿真结果表明:超静平台隔振与指向一体化控制方法充分利用了隔振和指向调节的测量与控制带宽,能够在宽频域范围消除外部扰动的同时,实现对观测目标的精确追踪。
[1]AndersonEH,LeoDJ,HolcombMD.UltraquietPlatformforActiveVibrationIsolation[C]//1996SymposiumonSmartStructuresandMaterials.InternationalSocietyforOpticsandPhotonics, 1996: 436-451.
[2]GengZJ,HaynesLS.SixDegree-of-FreedomActiveVibrationControlusingtheStewartPlatforms[J].ControlSystemsTechnology,IEEETransactionson, 1994, 2(1): 45-53.
[3]HylandDC,KingJA,DavisLD.ActiveVibrationIsolationwithStiffActuatorsandInertialSensors[C]//SPIE′s1996InternationalSymposiumonOpticalScience,Engineering,andInstrumentation.InternationalSocietyforOpticsandPhotonics, 1996: 93-102.
[4]ThayerD,CampbellM,VagnersJ,etal.Six-AxisVibrationIsolationSystemusingSoftActuatorsandMultipleSensors[J].JournalofSpacecraftandRockets, 2002, 39(2): 206-212.
[5]McInroyJE,HamannJC.DesignandControlofFlexureJointedHexapods[J].RoboticsandAutomation,IEEETransactionson, 2000, 16(4): 372-381.
[6] 段学超, 仇原鹰. 柔性支撑Stewart平台自适应交互PID隔振控制[J]. 控制理论与应用, 2009, 26(6):607-612.(DuanXuanchao,QiuYuanying.VibrationIsolationoftheFlexiblySupportedStewartPlatformUsingAdaptiveInteractivePIDControl[J].ControlTheory&Applications, 2009, 26(6):607-612.)
[7] 杨涛, 马嘉, 侯增广, 等.Stewart并联机构主动隔振平台的非线性L2鲁棒控制[J]. 机器人, 2009, 31(3):210-216.(YangTao,MaJia,HouZengguang,etal.NonlinearL2RobustControlofanActiveVibrationIsolationPlatformBasedonStewartParallelMechanism[J].Robot,2009, 31(3):210-216.)
[8] 刘磊,王萍萍,孔宪仁,等.Stewart平台动力学建模及鲁棒主动隔振控制[J]. 宇航学报, 2011, 32(6):1231-1238.(LiuLei,WangPingping,KongXianren,etal.DynamicModelingandRobustActiveIsolationControlofStewartPlatform[J].JournalofAstronautics, 2011, 32(6):1231-1238.)
[9] 李伟鹏, 黄海, 黄舟. 基于Stewart平台的星上微振动主动隔离/抑制[J]. 机械科学与技术, 2015, 34(4) :629-635.(LiWeipeng,HuangHai,HuangZhou.ActiveIsolation/SuppressionforSatelliteMicro-vibrationwithStewartPlatform[J].MechanicalScienceandTechnologyforAerospaceEngineering, 2015, 34(4) :629-635.)
[10]McInroyJE.ModelingandDesignofFlexureJointedStewartPlatformsforControlPurposes[J].Mechatronics,IEEE/ASMETransactionson, 2002, 7(1): 95-99.
Integrated Control Method for Vibration Isolation and Pointing Control of Ultra Quiet Platform
Wang Youyi1,2, Tang Liang1,2, He Yingzi1,2
1. Beijing Institute of Control Engineering, Beijing 100190, China 2. Science and Technology on Space Intelligent Control Laboratory, Beijing 100190, China
Futurespacemissionsrequireextremelyhighcontrolprecisionandstabilizationofthespacecraft,andultraquietplatformwithvibrationisolationandpointingcontrolforpayloadneedstobedeveloped.Sotheintegratedcontrolmethodwithvibrationisolationandpointingcontrolispresentedinthispaperinordertomeethighperformancerequirementsoffuturespacecraft.Firstofall,basedonthegeneraldynamicmodelofultraquietplatform,twodecouplingmodelssuitableforvibrationisolationandpointingcontrolarederivedrespectively,andthecorrespondingcontrolstrategiesaregiven.Onthisbasis,combiningwithdifferentcontrolbandwidthsoftwomethods,theintegratedcontrolmethodwithvibrationisolationandpointingcontrolisstudiedinordertorealizethecontroloverabroadband.Finally,thenumericalsimulationanalysisismade.Thesimulationresultsshowthattheintegratedcontrolmethodwithvibrationisolationandpointingcontrolcaneffectivelysuppressthedisturbancesinthewidefrequencyrange,andsimultaneouslyachieveaccuratetrackingofthetargetofobservation.
Ultraquietplatform;Vibrationisolation;Precisionpointing;Integratedcontrol
2016-02-10
王有懿(1983-),男,黑龙江人,博士,主要研究方向为航天器主动隔振与精确指向控制;汤 亮(1976-),男,甘肃人,研究员,主要研究方向为航天器导航制导与控制;何英姿(1970-),女,湖南人,研究员,主要研究方向为航天器导航、制导与控制。
TP316.2
A
1006-3242(2016)06-0033-07
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
实验流体力学(2022年6期)2022-02-06 03:14:26
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28 06:19:00
数学物理学报(2019年4期)2019-10-10 02:38:56
传媒评论(2017年8期)2017-11-08 01:47:36
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
护理实践与研究(2016年12期)2016-10-31 06:33:37
发明与创新(2016年22期)2016-10-13 07:43:14
发明与创新·中学生(2016年6期)2016-05-14 16:08:57
电源技术(2015年11期)2015-08-22 08:50:38