
基于迭代学习控制的投料机称重控制系统设计
2016-07-16 08:58刘博刘晓李明段英杰
筑路机械与施工机械化 2016年6期
刘博 刘晓 李明 段英杰

摘要:由于现有沥青拌和站投料设备的称重控制系统加料精度不稳定,故无法适应不同类型的物料。利用OPC实现Matlab与PLC之间的通讯,突破了PLC编程语言的限制,将迭代学习控制算法应用在PLC中,采用PI型学习控制律,分析了不同增益参数对系统性能的影响。结果表明:将迭代学习控制算法应用在称重控制系统中,能明显降低投料误差,改善其鲁棒性。
关键词:投料机;OPC;称重控制系统;迭代学习控制
中图分类号:U415.5文献标志码:B 文章编号:1000033X(2016)06010103
0引言
中国经济快速发展,交通量日趋增长,如何对沥青路面进行高效率、低成本的维护成为了亟需解决的问题。据统计,车辙是当前沥青路面结构最主要的破坏形式之一[12]。因此,在沥青混合料生产过程中,越来越多的施工单位使用抗车辙剂提升沥青混合料的高温稳定性[34]。
现有的沥青拌和站没有添加抗车辙剂的功能,多使用配套的自动化投料设备。抗车辙剂多为颗粒状,投料设备大多采用气力输送系统输送物料。这种设备通常利用电子称、可编程控制器(PLC)、变频器及螺旋输送机组成的称重控制系统进行抗车辙剂的定量投放,具有投放速度快、生产效率高等特点[5]。
笔者所在单位自主研发的智能投料机已成功应用在吉河高速建设项目。然而,在实际使用过程中发现,这种称重控制系统的精度受很多因素的影响,比如物料颗粒尺寸、设备机械机构、PLC控制程序等。如果称重控制系统存在较大误差,对施工质量将造成巨大影响。当抗车辙剂添加不足时,对沥青混合料的高温稳定性有较大影响;当添加过多时,会稀释沥青,无法正常摊铺。
试验研究表明,螺旋输送机的稳定性与准确性与物料颗粒尺寸有直接关系。螺旋出料口与计量仓之间有高度落差,即螺旋关闭时仍有一部分物料没有进入计量仓内,若关闭时机不当,则会造成较大的加料误差[6];虽然可以通过在加料过程后期降低螺旋转速、调整螺旋并关闭提前量来降低误差,但是每次加料时间间隔短(小于1 min),且气力输送过程时间长,称重过程时间就很短,因此采用上述方法很难获得很好的效果。
为了解决以上问题,需要一种有自适应性的控制算法来控制螺旋的转速和螺旋关闭的时机。由于PLC受编程语言限制,无法实现高级的复杂算法。本文结合Matlab强大的算法,利用OPC技术实现PLC与Matlab的实时通讯,将复杂的控制算法应用在PLC上。
1Matlab与PLC的数据通讯
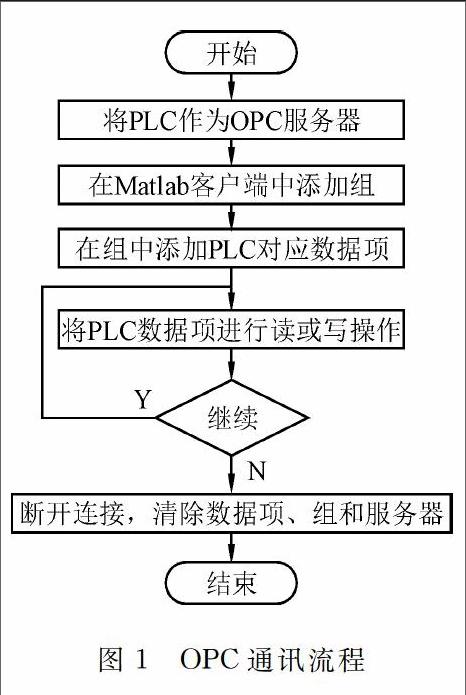
OPC(OLE for Process Control)由世界上领先的自动化公司和软硬件供应商合作开发,以微软的COM 和DCOM 技术为基础,定义了一套与制造商无关的工业标准接口,解决了不同应用程序和控制器之间的数据交换问题。整个OPC通讯流程如图1所示。
利用西门子公司的Simatic Net软件将PLC建立为OPC服务器,支持OPC Data Access(DA)30,可以与任何标准的OPC客户端通信。用户可通过该软件监控PLC的定义属性、通信协议,创建客户端访问的数据项(Item)及数据地址等。Matlab通过OPC Toolbox(OPC客户端数据访问软件)连接任何OPC数据服务器。此时,将Matlab作为客户端访问OPC服务器,通过添加PLC中对应的数据项进行数据读写。同时,本系统需要获取变频器的频率、称重传感器读数、继电器状态等信息,可通过Matlab中相关语言命令在算法中调用相关参数进行实时的运算读写。
2称重系统的迭代学习控制
2.1现有称重控制系统特性
投料机称重控制系统的核心部分为螺旋输送机以及电气控制系统。称重过程分为粗加料和精加料2个阶段,即在初始阶段螺旋输送机以较快速度加入粗加料,当计量仓内物料重量快达到投料设定值时,降低螺旋转速,进入精加料阶段。在螺旋关闭之前,始终有一部分物料未进入计量仓内,需要有一个提前量。这个提前量需要设备操作人员进行设定,由于受各种因素的影响,提前量不是固定不变的,精加料阶段也是为了减小提前量设置不当带来的误差。 如果加料误差波动较大将无法满足实际生产需要。
螺旋输送量是衡量螺旋输送机生产能力的重要指标。其对应的输送速度与加料精度密切相关。螺旋输送机的输送量可按照以下公式计算
根据式(1)可以看出,在输送物料类型改变时,φ、λ也会相应改变;在称重控制系统参数不变的情况下,加料误差会发生变化,甚至会超过误差允许范围。
因此,需要采用具有自适应功能的控制算法,通过调整变频器频率和提前量,使误差在允许范围之内,无需操作人员反复调整参数。称重控制系统结构如图2所示。
2.2迭代学习控制算法概述
迭代学习控制适用于有限时间区间上运行过程具有重复性的被控对象[7]。与其他控制算法相比,迭代学习控制利用信息充分、收敛速度快,无需知道被控系统的具体数学模型,计算过程并不复杂,适用于要求高的实时性系统[89]。
迭代学习控制算法经过20多年的发展不断成熟,目前被广泛应用到各类控制系统中。其中PID型迭代学习控制算法的收敛条件简单,一般只与系统的某些部分相关。
3试验结果分析
为了验证迭代学习控制算法的有效性,在研发出的智能投料机上进行了试验。迭代学习控制算法中比例增益对系统的收敛速度以及稳态误差有较大影响。为了分析不同学习增益下系统的运行效果,分别选取L=0.1、0.5、0.9三种情况进行试验,通过调整迭代学习控制算法的学习律。取M=16 kg,T=10 s。为了确保投料误差为正值,在第1次投料时,将螺旋关闭,提前量设为0。试验结果如图3所示。
由图3可以看出,由于第1次加料螺旋关闭提前量设为0,使得初始误差较大。但经过多次迭代学习之后,加料误差可以迅速降低,且随着L的增大,系统收敛速度增快。当L=0.9时,系统在加料5次之后加料误差稳定。
同时,由于学习控制律中引入了积分环节,通过调整其参数,可以进一步将系统稳态误差降低至小于005 kg。
为了验证系统的鲁棒性,在加料误差稳定之后改变物料类型,同时取M=12 kg。从图4中看出,在改变物料类型之后,误差会变大,但随着迭代学习的进行,加料误差迅速减小,在10次之后达到稳定。称重控制系统采用迭代学习控制算法之后,具有较好的鲁棒性。
4结语
通过OPC建立Matlab与PLC之间的通讯,将迭代学习控制算法应用于螺旋加料机的称重控制系统中,通过试验分析得到以下结论。
(1)通过OPC建立Matlab与PLC之间的通讯,同时具有良好的实时性,可以将复杂的算法应用在PLC上,实现过程简单。
(2)采用PI型迭代学习控制律,通过调整适合的参数,在保证系统收敛速度的情况下,使系统稳态误差趋于0。
(3)由于迭代学习控制算法不依赖系统的具体模型,因此,当外部条件改变时,称重控制系统依然能够根据误差快速调整系统输入,使系统误差快速降低到可接受的范围内,具有良好的鲁棒性。
参考文献:
[1]王辉,李雪连,张起森.高温重载作用下沥青路面车辙研究[J].土木工程学报,2009,42(5):139144.
[2]杨红锁.抗车辙剂改性沥青混合料的试验研究[J].山西交通科技,2014(1):57.
[3]张喜艳,王闻,王春.不同外掺剂改性沥青混合料路用性能对比研究[J].筑路机械与施工机械化,2015,32 (7):5963.
[4]欧祖敏.RA抗车辙剂路用性能及施工技术研究[D].重庆:重庆交通大学,2011.
[5]张西良,马奎,王辉,等.颗粒尺寸对螺旋加料机定量加料性能的影响[J].农业工程学报,2014,30(5):1927.
[6]向冬枝,徐余伟.螺旋输送机设计参数的选择和确定[J].水泥技术,2010(1):2933.
[7]李仁俊,韩正之.迭代学习控制综述[J].控制与决策,2005,20(9):961966.
[8]孙明轩,严求真.迭代学习控制系统的误差跟踪设计方法[J].自动化学报,2013,39(3):251262.
[9]王东兴,侯明,胡平平.变频调速系统离散化迭代学习控制法[J].电工技术学报,2005,20(5):7579.
[10]邓歆.异步电机全阶磁链观测器的设计分析及其应用研究[D].武汉:华中科技大学,2010.
