
测站晃动条件下的全站仪跨海高程传递方法
2016-07-15 05:08:43吴迪军
测绘通报 2016年6期
吴迪军,熊 伟
(中铁大桥勘测设计院集团有限公司,湖北 武汉 430050)
测站晃动条件下的全站仪跨海高程传递方法
吴迪军,熊伟
(中铁大桥勘测设计院集团有限公司,湖北 武汉 430050)
摘要:针对海中测量平台晃动条件下全站仪垂直角观测的难题,提出了一种基于掌上电脑的连续多次重复记录垂直角读数取均值的观测方法,以最大限度地削弱平台晃动对垂直角观测值的影响,从而实现高精度的跨海高程传递测量;研发了基于掌上电脑的外业测量记录软件,可显著提高作业效率及成果精度。工程实例分析结果显示,路线总长约16.7km的跨海水准闭合环的高差闭合差为-15.3mm,符合国家二等水准测量的规定要求。该方法已在港珠澳大桥跨海高程传递中得到成功应用,可在其他类似跨海桥隧工程建设中推广。
关键词:测站晃动;全站仪;三角高程法;跨海高程传递;跨海大桥
大型跨海桥梁工程建设中,需要进行高精度的跨海高程传递测量,目的在于统一大桥两岸的高程基准,并将其精确传递到海中桥墩及塔柱上。由于大型跨海桥梁短则数千米,长则数十千米,采用常规跨河水准测量方法进行两岸跨海高程传递的难度极大,因此,在大桥开工建设之前,一般采用陆地一等水准测量绕行连测的方法实现两岸高程的精确传递[1-2];当不具备陆地水准连测条件时,则采用GPS水准联合重力测量方法传递高程[3]。随着工程建设的不断推进,利用海中试桩工程等基础工程建立若干海中测量平台及优先施工的部分桥墩(简称优先墩),使得跨海距离缩短至2km左右[4],为利用全站仪将高程基准向海中建筑或结构物上传递,以及实现跨海高程的直接贯通提供现实条件。然而,受海风海浪及涨落潮汐冲击的影响,海中测量平台及海中桥墩始终处于不停的轻微晃动之中,置于平台或桥墩上的全站仪垂直角变化可达数秒甚至数分,现行规范中的跨河水准测量方法不再适用。本文以港珠澳大桥工程为背景,针对海中测量平台晃动的实际条件,提出了一种基于全站仪三角高程法的跨海高程传递测量方法。
一、海中测量平台晃动规律的测试分析
港珠澳大桥主体工程开工前后,沿桥中线北侧建有6个海中测量平台,将珠海至香港之间长约30km的跨海路线分割成2.3~6.3km不等的7个较短跨段。平台顶面建造多个强制归心观测墩,用于架设GNSS设备或全站仪进行观测。港珠澳大桥跨越伶仃洋海域,海洋气候环境恶劣,波浪、风激、海流等多种外力对海中测量平台的冲击作用较大,致使平台始终处于轻微晃动之中。为了了解海中测量平台晃动条件下全站仪垂直角的变化规律,在6个平台上安置全站仪进行专门测试。测试方法如下:将全站仪安置在海中测量平台上,瞄准远岸观测目标并保持固定;启动全站仪观测和记录程序,按一定时间间隔连续记录n个垂直角数据,由此构成一组观测。
图1为某平台晃动测试散点图,一组测试连续记录200个垂直角数据,记录时间间隔为0.3s。200个垂直角的平均值为51.6″,代表平台晃动的平衡位置,图中用水平实线表示。由图可见,平台晃动条件下瞬时垂直角数值以平均值为中心上下跳动,符合简谐振动规律,与文献[5]的分析结果一致。
为了进一步分析平台垂直角变化的规律和特性,将200个测试点按垂直角大小分组进行统计,绘制垂直角分布直方图(如图2所示)。由图2可知,垂直角观测值落在平均值附近区间(40,60)中的点数最多,且离均值越远,点数越少;直方图的高峰位于中部,左右两侧大致对称。由此可见,海中测量平台上全站仪垂直角数据符合正态分布的集中性、均匀变化性及对称性等特征,垂直角观测值服从正态分布。

图1 海中测量平台晃动测试散点图
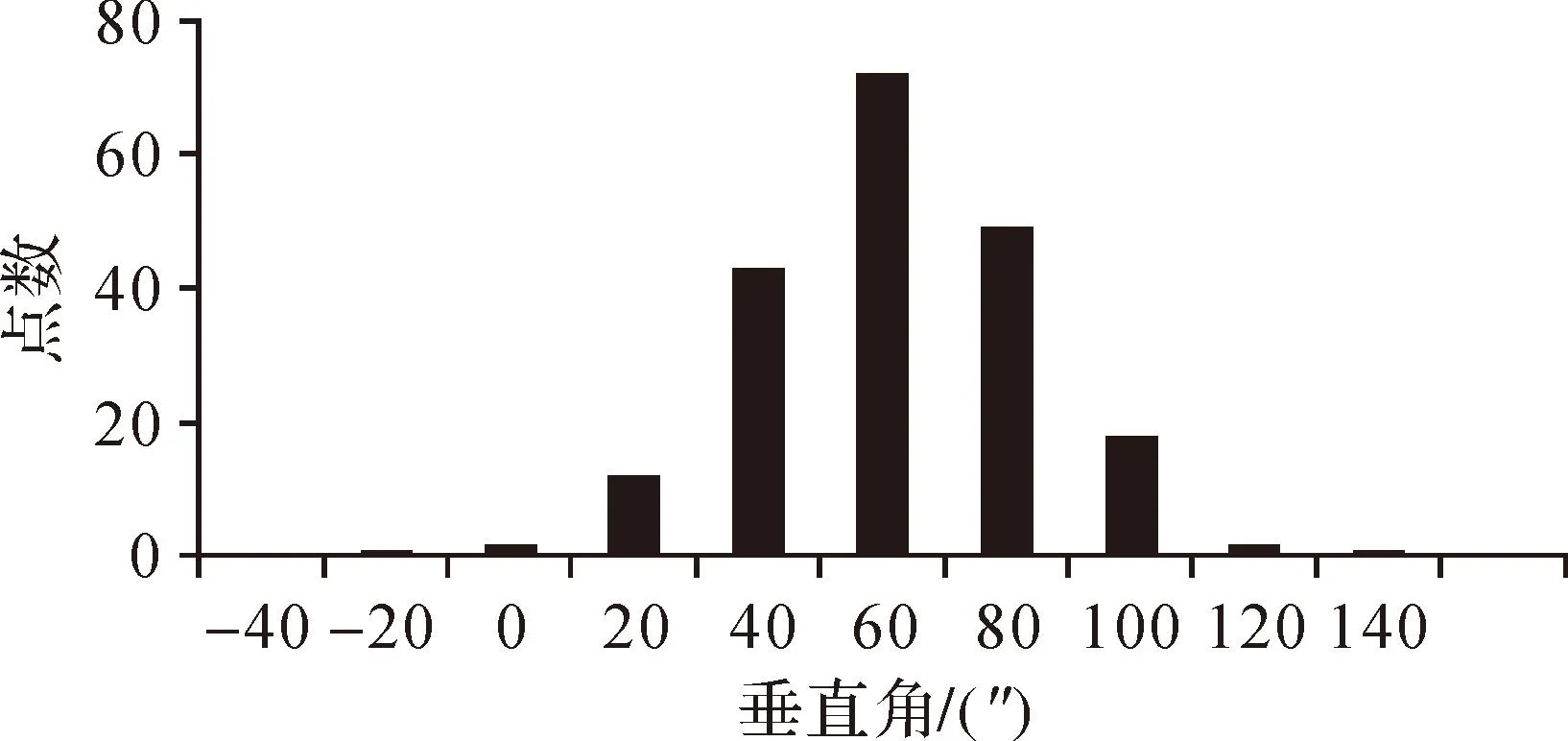
图2 测试点垂直角分布直方图
对不同记录次数时垂直角均值与全部200次记录数据总均值的偏差进行统计分析。结果显示,随着记录次数的不断增加,垂直角均值的偏差逐渐缩小并趋于零。也就是说,当重复记录的次数足够多时,多次重复读数的垂直角平均值逐渐趋于无晃动影响的正确观测值。由此进一步得出,采用多次连续记录垂直角数据的平均值作为跨海水准测量中每半组垂直角观测值,可以有效地消除或削弱平台晃动对垂直角观测的不利影响。
下面具体分析不同平台、不同时段晃动周期及振幅变化的大小及规律。对6个平台不同时间所做的总共49组测试数据进行统计分析,绘制如图3所示的平台周期及振幅变化曲线图,横轴表示测试组编号,纵轴表示由各组测试数据统计得到的平均周期(s)及平均振幅(″)。

图3 平台振动周期及振幅变化曲线图
由图3可以看出,平台振幅在5″~50″之间变化,平均周期为0.6~6s,且绝大多数平台的振动周期介于1~3s之间。
综合前面的分析,得出如下主要结论:海中测量平台的晃动符合简谐振动规律,所测试平台的振幅基本介于5″~50″之间,振动周期在0.6~6s之间变化;平台上全站仪垂直角观测值服从正态分布,采用多次重复取均值的垂直角观测方法,可有效地消除或削弱平台晃动对垂直角观测值的不利影响。
二、测站晃动条件下的垂直角观测方法设计
1. 垂直角观测方法
跨海高程传递测量中垂直角观测程序、方法及测回数、组数,可参照三角高程法跨河水准测量的一般规定进行设计[6],考虑到跨海测量条件的复杂性和困难性,笔者建议采用优化跨海场地图形、采用单标观测法等改进措施,简化现场测量作业程序,提高测量效率和成果精度,具体可参考文献[7—8]。本文重点针对测站晃动引起垂直角观测值异常跳动的问题,对一组垂直角观测方法进行专门设计。
基于海中测量平台晃动测试分析结果,本文提出一种通过重复多次记录垂直角数据取均值的垂直角观测方法,辅以仔细照准目标等技术措施,以消除或削弱垂直角读数跳动对观测高差的影响。每组垂直角观测程序如下:在盘左位置用全站仪望远镜中丝精确照准远岸跨海点上安置的观测标志或标灯,连续记录垂直角读数n次,构成半组观测;然后纵转望远镜,在盘右位置按盘左操作方法同样进行照准和读数。
垂直角观测中的设计参数有两个:一个是每半组观测中一次照准远岸标志(或标灯)的垂直角记录次数n;另一个是相邻两个垂直角记录数据之间的时间间隔δt。n值应根据平台晃动测试结果(即垂直角变化幅度)及跨海高程测量精度要求共同确定。根据平台晃动测试及跨海高程实测数据的分析结果,得出确定n值的基本原则:当某平台上全站仪垂直角平均值偏差小于2″时,取前n次垂直角均值作为半组垂直角观测值,跨海高差测量精度可满足二等标准,这时的n即为该平台的记录次数设计值。而时间间隔参数δt的确定原则是:δt不宜大于相应平台的振动周期的1/4,以获取足够密度的垂直角数据,确保垂直角读数均值的精度。根据图3分析结果,本项目中取δt≤0.5s是比较合理的。当跨海测线两端均为海中测量平台时,则应依据晃动量较大的平台确定参数n、δt的取值。
2. 垂直角自动记录软件设计
针对测站晃动条件下全站仪跨海高程传递中的垂直角多次重复记录的实际需要,专门研制出使用掌上电脑控制全站仪进行自动记录和存储的外业观测软件,可提高观测精度和作业效率。利用MicrosoftVisualStudio2005平台及C#语言进行WindowsMobile的软件开发,配合掌上电脑使用。外业观测时,使用数据线或蓝牙将掌上电脑及全站仪连接,在全站仪及掌上电脑上分别进行端口配置后(主要配置参数为n、δt),即可进行垂直角的观测,掌上电脑自动记录存储n次垂直角数据。采用外业记录软件预先设置垂直角记录次数及时间间隔,记录数据的时间间隔均匀,更有利于消除垂直角数据跳动的误差;其次,通过记录软件采集的垂直角观测数据可直接导入内业软件进行后续计算,易于实现内、外业测量作业的一体化。
3. 外业观测中的注意事项
1) 跨海高程观测应尽量选择在平潮(平潮前后各1h内为宜)、风力微和(风力不大于3级)、浪涌较小的时段内进行。平台晃动量必须在全站仪竖轴倾斜补偿范围以内,如LeicaTS30全站仪的补偿范围为4′,超出这个范围后全站仪不能对垂直角观测值进行补偿改正。实践表明,一般而言,垂直角变化幅度不宜超过3′,即振幅不宜大于1′30″。
2) 垂直角观测前,可先进行平台晃动大小的测试分析,然后根据垂直角变化幅度确定每半组观测中垂直角的记录次数。
3) 垂直角观测前,应按照仪器使用说明书的要求进行全站仪校准,重点对影响垂直角观测精度的项目进行精确校准。
4) 垂直角观测时应仔细瞄准,尽可能准确照准目标。
5) 应采用自动测量记录软件记录垂直角数据,确保垂直角记录数据的均匀性,以有效消除平台晃动对垂直角观测值的影响,提高跨海高程测量的精度。
三、实例分析
本文方法已在港珠澳大桥工程附近进行了试验,跨海高程测量成果达到国家二等水准测量精度要求,并在海中测量平台高程传递及桥梁施工高程定位中得到成功应用。本文选择港珠澳大桥海中测量平台跨海高程实测数据进行分析。图4所示为珠海近岸海域跨海高程测量路线示意图,图中,平台1、平台2为靠近珠海海岸的两个海中测量平台,位于港珠澳大桥中线以北约500m处,其余5个水准点分别位于珠海海岸边(1#、2#)或海中小岛上(3#—5#),7个跨海高程点通过陆地水准测量、常规跨海水准测量及测站晃动条件下的跨海高程传递测量连接构成二等水准测量闭合路线。路线总长约16.7km,其中,涉及海中测量平台的测段共3个,平台1—平台2的跨距约6.3km,平台1—1#的跨距约2.3km,平台2—5#的跨距约3.7km。3个测段跨海高程传递测量中的全站仪垂直角观测按前述方法进行设计。下面以平台1—平台2的跨海高程测量为例进行分析。
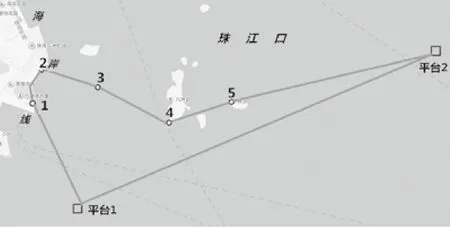
图4 跨海高程测量路线示意图
平台1—平台2之间的跨距约6.3km,超过现行规范规定的最长跨距(3.5km)[6],而且测量平台处于复杂多变的海洋环境中,风浪、潮汐及大气环流影响复杂,因此,必须对全站仪三角高程法跨海高程传递测量进行专门设计。跨海场地布设及垂直角观测程序、测回数及组数设计、测量限差验算等技术要求参照现行规范[6]及文献[7—9]进行设计,测站晃动条件下的垂直角观测按本文方法实施。
首先对两个测量平台的晃动情况进行测试分析。测试分析结果显示:平台1上全站仪垂直角变化幅度35″,平均振幅约12″;平台2上垂直角变化幅度70″,平均振幅约25″。取振幅大者(平台2)作为本跨海段垂直角变化幅度参数值,据此选定每半组垂直角观测次数为40次。其次,根据跨海距离、测量等级及仪器级别,确定跨海水准测量的测回数为100,半测回中垂直角观测组数为10。采用四边形简化图形布设跨海场地,使用两台LeicaTS30全站仪按文献[7]提出的垂直观测程序进行各测回垂直角的同步对向观测。垂直角观测记录及计算采用电子手簿配合专用软件进行。

四、结束语
本文针对海中测量平台晃动造成全站仪垂直角不停跳动的问题,在平台晃动影响测试分析的基础上,提出了一种全站仪跨海高程传递的垂直角观测方法,即连续多次重复记录远岸标志垂直角读数取均值的方法,可最大限度地削弱平台晃动对垂直角观测值的不利影响,从而实现高精度跨海高程传递测量。研发了基于掌上电脑的外业测量记录软件,变人工重复按键操作和手工记录数据的作业模式为掌上电脑自动记录和存储数据的自动测量模式,可显著提高作业效率及成果精度。工程实例分析结果验证了该方法的可行性及其有效性。
应用本文方法进行测站晃动条件下的全站仪跨海高程传递测量时,首先应尽可能选择在平潮、风力微和、浪涌较小的时段内进行外业观测,且平台晃动量必须在全站仪竖轴倾斜补偿范围以内。同时,观测照准应仔细,尽可能提高目标照准的准确度。其次,应采取自动记录读数的方法,以提高垂直角均值的精度。
参考文献:
[1]朱瑶宏,许提多. 杭州湾跨海大桥测量控制方案综述[C]∥中国公路学会桥梁和结构工程分会2005年全国桥梁学术会议论文集.北京:人民交通出版社,2005: 40-47.
[2]吴迪军, 熊伟, 郑强. 港珠澳大桥首级控制网复测方法研究[J]. 工程勘察, 2011, 39(9): 74-78.
[3]朱鹤,叶云.GPS与重力测量在东海大桥高程控制测量中的应用[J]. 铁道勘察, 2005(3): 19-21.
[4]郭秉江,许提多.LeicaTCA1800 高精度超长跨海高程传递[J]. 铁道勘察, 2007(1): 1-8.
[5]祁德庆,王琳琳. 多种环境力联合作用下杭州湾跨海大桥海中平台动力响应分析[J]. 力学季刊, 2011, 32(3): 343-352.
[6]中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. 国家一、二等水准测量规范:GB/T12897—2006[S]. 北京: 中国标准出版社, 2006.
[7]吴迪军,熊伟,李剑坤. 精密三角高程跨河水准测量的改进方法[J]. 测绘通报, 2010(3): 4-6, 20.
[8]吴迪军. 单标三角高程法跨河水准测量设计与实验分析[J]. 地理空间信息, 2012,10(4): 132-133, 136.
[9]吴迪军,许提多,罗苏. 关于三角高程跨河水准测量限差的探讨[J]. 地理空间信息, 2012, 10(5): 105-107.
A Method of Sea-crossing Trigonometric Levelling by Total StationintheConditionofSurveyStationRocking
WU Dijun,XIONG Wei
收稿日期:2015-07-06
基金项目:中国中铁股份有限公司科技开发计划(2012-重大-2)
作者简介:吴迪军(1964—),男,博士,教授级高级工程师,主要从事工程测量技术管理与应用研究。E-mail:Wudi01@163.com
中图分类号:P258
文献标识码:B
文章编号:0494-0911(2016)06-0087-04
引文格式: 吴迪军,熊伟. 测站晃动条件下的全站仪跨海高程传递方法[J].测绘通报,2016(6):87-90.DOI:10.13474/j.cnki.11-2246.2016.0197.
猜你喜欢
第二课堂(小学版)(2022年5期)2022-05-26 01:06:50
中学生数理化·八年级物理人教版(2021年5期)2021-11-22 07:57:50
北京测绘(2020年12期)2020-12-29 01:37:18
作文小学中年级(2019年10期)2019-11-04 00:39:56
工程与建设(2019年3期)2019-10-10 01:40:18
电测与仪表(2016年9期)2016-04-12 00:29:52
中国交通信息化(2015年8期)2015-06-06 06:33:14
吉林地质(2014年3期)2014-03-11 16:47:31
筑路机械与施工机械化(2014年3期)2014-03-01 02:58:32
河南科技(2014年22期)2014-02-27 14:18:08
