基于MATLAB的拖拉机座椅悬架振动特性分析软件的开发
2016-07-14 08:50:57江苏南京农业大学工学院周旖鋆赵明飞周晶莹吴义孝王坤朱跃
河北农机 2016年7期
关键词:软件开发
江苏南京农业大学工学院 周旖鋆 赵明飞 周晶莹 吴义孝 王坤 朱跃
基于MATLAB的拖拉机座椅悬架振动特性分析软件的开发
江苏南京农业大学工学院周旖鋆赵明飞周晶莹吴义孝王坤朱跃
摘要:由于传统的数学模型难以直观描述拖拉机座椅悬架振动特性,本文利用MATLAB GUI编程开发相应的仿真软件能直观表现座椅振动响应曲线。在MATLAB GUI中建立三自由度拖拉机座椅悬架振动模型,给定拖拉机行驶速度和座椅悬架结构内部参数,依据国标确定地面不平度等级,用龙格库塔算法求解系统运动微分方程组。用户可任意输入座椅参数和人体质量,输出座椅的振动位移和响应加速度随时间的变化以反映拖拉机座椅振动对人体舒适度的影响,具有较好的人机交互能力。
关键词:座椅悬架;振动特性;MATLAB;软件开发
由于拖拉机等农用车辆运行路况条件恶劣,传统的座椅悬架模型难以直观描述其振动响应[1]。因此需要开发一种能够直观反映在恶劣路况下拖拉机座椅悬架模型振动响应曲线[2]的软件。
MATLAB是一种新型的软件开发工具,能将所有GUI支持的用户控件都集成在这个环境中并提供界面外观、属性和行为响应方式的设置方法[3],而且具有强大的绘图功能,可以轻松获得高质量的曲线图[4]。同时MATLAB具有串口操作的功能[5],可以利用计算机与实际硬件连接进行半物理仿真实验,GUI可以内嵌MATLAB支持的所有图形处理函数,包括二维绘图和三维绘图函数,通过MATLAB开发工具的使用,将仿真结果以生动明了的形式展现给用户,能够提高用户对算法或数据处理效果的认识[6]。因此,本文考虑用MATLAB开发动态座椅悬架振动系统仿真软件来研究和改善座椅悬架动态性能,合理选择悬架的参数。首先在MATLAB中建立座椅悬架的三自由度振动模型,然后依据龙格库塔算法解运动微分方程,最后基于MATLAB/GUI开发界面反映拖拉机行驶过程座椅振动响应加速度和位移随时间的变化,实现了座椅悬架的实时、动态的模拟仿真[7]。
1 座椅悬架物理模型的建立
物理系统的自由度越多,物理模型越真实,但计算量也越大,且对精度的提高不明显[8]。本文采用的是三自由度人体动态模型。三自由度物理模型如图1所示。

图1 三自由度物理模型
图中:M1—车轮质量(kg);M2—车体质量(kg);M3—簧载质量(kg);K1—轮胎等效刚度(N/m);K2—车体悬架等效刚度(N/m);K3—座椅悬架等效刚度(N/m);C2—车体悬架的等效阻尼(N·s/m);C3—座椅悬架的等效阻尼(N·s/m);q—随机路面激励输入。
2 座椅悬架状态空间方程的建立
车辆是一个复杂的振动系统,研究表明,座椅垂直方向的振动对人体舒适度的影响最大[9]。当车速u为定值时,时间频率下的路面不平度垂直速度功率谱密度为常数4π2Gq(n0)n02u,所以随机路面不平度轮廓可以由谱密度的白噪声通过一积分器产生,即,其中,ω(t)为白噪声[10]。
假设u=15Km/h,路面为c级,查国标可知,Gq(n0)的几何平均值为256,则q(t)=0.0477∫ω(t)dt。三自由度系统在地面激励下的运动方程为:

其中,Z1表示轮胎轴垂向位移,Z2表示车体对地面的垂向位移,Z3表示座椅悬架的响应位移。
为了便于分析与计算,将运动微分方程转化为状态空间方程,取状态向量为:

由于人体舒适度与座椅响应加速度有关,所以取响应加速度为输出量,则输出向量Y=[Z3''];同时取输入向量I=[K3K3q]T,将上述向量代入系统微分方程组,得到对应的状态空间方程。
3 仿真软件的界面及主要开发程序
为方便用户使用,采用MATLAB编程的方法,制作一个工具使用界面。
开发仿真工具的主要程序如下:
可编辑文本控件由hedit=uicontrol(gcf,'Style','edit','position',[]);生成;
静态文本控件由uicontrol(gcf,'Style','text','position',[],'String','');生成;
按钮控件由 hpush=uicontrol(gcf,'Style','push','position',[],'string','');生成;
用set(hpush,'callback','');设置回调路径;
用rectangle等函数将“人-椅-轮”的物理模型建立在GUI界面中;
m1=str2double(get(hedit,'string'))句柄让参数在不同的程序文件之间传递;
Ode45等函数对建立振动模型时所建立的运动微分方程进行求解;
用while T<12;pause(0.2);set(Q,'xdata',td,'ydata',yd);T=T+0.1;end构成一个循环,利用这个循环处理运动过程的模拟。
set(D,'ydata',Y);让生成动画的坐标参数随时间更新。
工具使用界面如图2所示。
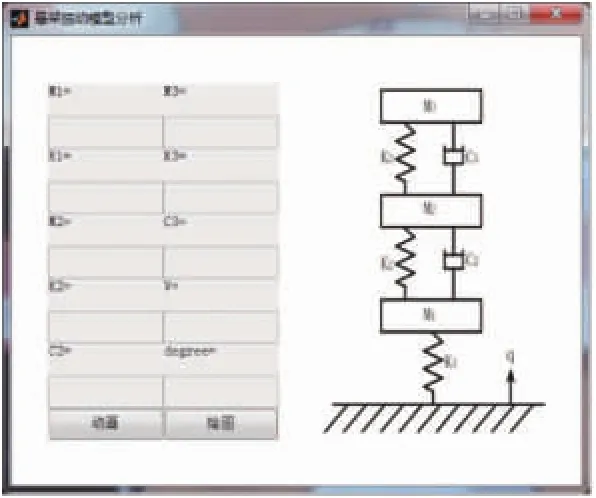
图2 工具使用界面
4 仿真软件的应用
由拖拉机座椅质量以及材料刚度阻尼各方面的合理性初定座椅结构参数,在GUI界面输入,用龙格库塔算法对运动方程组求解,并得到响应加速度和位移随时间的变化。
以下一组数据为仿真时输入的参数:
M1=15kg;M2=8.8kg;M3=43.4kg;K1=31000N/m;K2=18000N/m;
K3=44130N/m;C1=830N·s/m;C2=200N·s/m;C3=1485N·s/m。
在c级地面随机激励下,拖拉机以15km/h的速度行驶时,响应加速度仿真结果如图3所示。
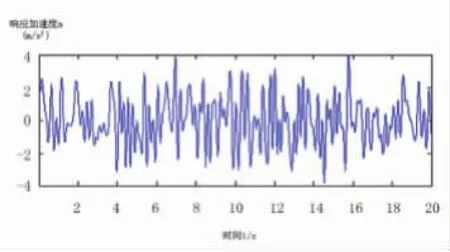
图3 响应加速度仿真结果
相对位移仿真结果如图4所示。

图4 相对位移仿真结果
5 结论
本文基于MATLAB/GUI开发了一种振动分析软件,该软件界面简洁,具有良好的人机交互能力,可输入座椅悬架各部分的质量、刚度、阻尼,车辆行驶速度,路面不平度等级,实时输出座椅的响应加速度和位移,最终用户可以直观地看到拖拉机在恶劣路况下的座椅悬架振动特性,对预测和评价一定条件下拖拉机座椅的舒适度具有实际应用意义。
参考文献:
[1]高伟.基于磁流变阻尼器的车辆座椅悬架半主动控制研究[D].西安科技大学,2012.
[2]陈寒霜.汽车座椅空气弹簧悬架振动特性研究[D].华南理工大学,2012.
[3]肇世华,张洪.基于MATLAB/Simulink的冲击压路机牵引主机座椅悬架系统的研究[J].工程机械,2009,03∶29-33+90-91.
[4]曹君.基于“车-椅-人”模型的车辆座椅悬架H_∞控制研究[D].中南大学,2006.
[5]冯海生.基于磁流变阻尼器的半主动车辆座椅悬架研究[D].东北林业大学,2010.
[6]杜宇.工程车辆半主动座椅悬架磁流变阻尼器控制的建模与仿真[D].东北林业大学,2011.
[7]柳伟.半主动座椅悬架的设计与振动特性研究[D].南京农业大学,2011.
[8]张猛.基于磁流变阻尼器的汽车半主动座椅悬架研究[D].长安大学,2015.
[9]刘委.基于空气弹簧和磁流变减振器的座椅悬架系统振动特性研究[D].南京农业大学,2010.
[10]陈学文,张衍成,杨威勇,邵鹏生.车辆座椅悬架模糊控制与仿真[J].制造业自动化,2013,22∶71-73.
作者简介:周旖鋆,1996年生,四川人,本科,研究方向:机械设计制造及其自动化。
基金项目:国家自然科学基金(51275249);南京农业大学SRT计划项目(1530C28)。
猜你喜欢
知音励志·社科版(2016年11期)2016-12-20 18:33:45
科技创新与应用(2016年33期)2016-12-17 13:56:46
科技创新与应用(2016年33期)2016-12-17 13:56:02
科技创新与应用(2016年33期)2016-12-17 13:54:34
科学与财富(2016年15期)2016-11-24 15:29:10
商情(2016年39期)2016-11-21 09:58:50
电脑知识与技术(2016年25期)2016-11-16 13:34:38
电子技术与软件工程(2016年18期)2016-11-14 23:36:02
电子技术与软件工程(2016年18期)2016-11-14 23:30:16
电子技术与软件工程(2016年18期)2016-11-14 01:29:36