
水下目标声学探测识别初步实验研究
2016-07-14 10:03秦华伟范相会胡杭民杨宏升
杭州电子科技大学学报(自然科学版) 2016年4期
秦华伟,范相会,胡杭民,杨宏升
(杭州电子科技大学机械工程学院,浙江 杭州 310018)
水下目标声学探测识别初步实验研究
秦华伟,范相会,胡杭民,杨宏升
(杭州电子科技大学机械工程学院,浙江 杭州 310018)
摘要:介绍了水下目标三维成像技术及基本原理,根据目标回波亮点模型,设计出线性换能器阵列系统;该系统发射一次声波就可以获取包含水下目标信息的一系列二维回波信号,再由计算机处理回波信号合成目标的三维声学图像.其次,分析了刚性目标和柔性目标的回波散射强度的差别.实验结果表明,目标回波亮点模型在实际应用中切实可行,为声纳目标识别等方面的研究提供支持.
关键词:水下目标;声学探测;回波亮点;回波强度
0引言
声呐探测技术是人类探测海洋的主要手段,水下目标的三维声成像技术在水下目标的探测、识别等方面有重要的意义.声成像技术的主要原理是利用发射换能器发射声波,再由接收换能器接收回波信号,所接收到的回波携带有水下目标的信息,通过计算机对声波信号的处理合成目标的二维或多维图像[1].
目前水下目标探测中普遍使用的声呐系统主要是侧扫声呐和扇扫声呐.侧扫声呐的换能器基阵一般安装在水下拖体的两侧,波束发射方向与舰船行进方向垂直;通过拖体的前进合成二维面阵,再由二维面阵的数据合成水下目标的三维图像.扇扫声呐直接采用二维声呐基阵,在水下空间的3个方向X,Y,Z上直接获得分辨力;三维成像声呐的典型代表当属欧洲共同体和挪威共同研发的Echoscope系列声呐[2].Echoscope声呐采用了平面基阵声呐,因此阵元数和相应的电子通道数大大增加;每发射一次声波,根据接收到的回波信号可得到水下目标在垂直和水平方向上的声学特征信息,再由相关计算机软件进行三维模型重建,得到水下目标的三维声学模型[3].
本文采用基于亮点模型的典型水下目标的回波信号成像方法,对刚性铁球和柔性气球进行声学探测识别,并且对比了刚性物体和柔性物体回波强度的差异,为水下目标声学成像、目标识别等方面的研究提供思路和方法.
1水下目标回波亮点模型
1.1水下目标回波
当超声波在传播过程中碰到障碍物时,会在障碍物的表面激发出次级声源,并向周围进行散射[4].对于形状规则的球形物体,由于发射的声波是小振幅波,所以接收到的声学回波信号服从线性声学规律;因此,可以把水下目标等效为一个线性不变系统,回波信号就是目标对入射声波信号的响应.目标回波是入射声波与目标相互作用的结果,在相互作用的过程中,目标物体本身的相关声学特征信息也会反应在声学回波信号上[5].因此,对水下目标的声学回波信号进行一些分析和处理,可以提取出水下目标的声学特征信息.
1.2目标回波亮点函数模型
亮点间的相对位置关系是一个固定的比例关系,表征了目标的形状信息,因此其可以作为目标识别的重要参数之一[6].
目标回波与目标的固有震动特性和入射声波的特性有关[7].单个亮点的目标传递函数可以表示为[8]:

(1)

由线性迭加原理可知,水下目标亮点模型可以等效成多个亮点的迭加,因此,总的传递函数关系式可以表示成:
(2)
其中,N为等效的亮点总数,目标模型就是由一组不同方位上的Am,τm,φm(m=1,2,…,N)3个参数组成.
2目标识别实验
2.1刚性球体目标识别
实验在室温为23 ℃的大水箱里进行,实验原理如图1所示.目标圆球为铁球,由5个换能器组成的线性换能器阵列正对目标圆球,以圆球为中心,绕圆球1周进行回波探测实验.实验发射的信号为200~300kHz宽带线性调频信号,波形选择为正弦脉冲波,脉冲长度为10个周期,脉冲间隔为10ms.接收换能器接收到的回波波形如图2所示.波形较大的连续10个周期波形为目标圆球的回波,回波的声压幅值为5mV左右,且回波信号较为明显.
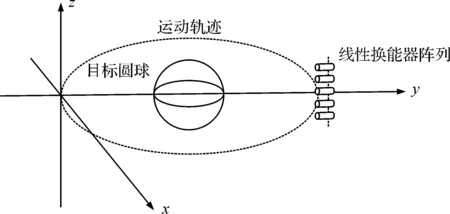
图1 实验原理图

图2 铁球回波信号
从图2可以看出目标回波时延τ,由目标回波时延和超声波在水中声速v可以计算出目标相对换能器的位置D=v τ/2.根据实验结果得到的刚性铁球侧面目标回波散点如图3所示,20个目标散点反应了铁球的侧面轮廓.绕铁球1周采集的回波散点经过处理后形成铁球的三维散点图如图4所示.对铁球的三维散点进行拟合得到的球体方程如下:
(x-0.546)2+(y-0.523)2+(z-0.477)2=100.835.
(3)

图3 铁球侧面回波散点图
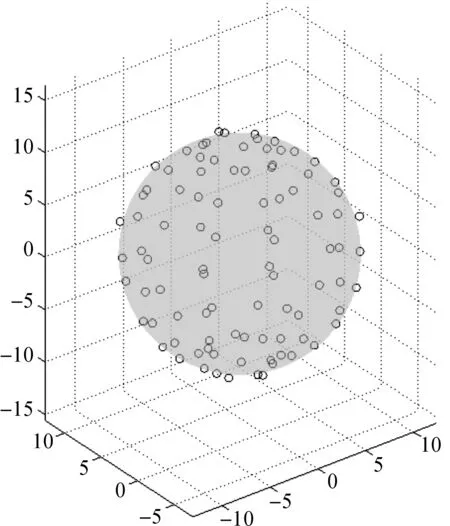
图4 铁球三维回波散点图
刚性小球的直径为10cm,根据小球的三维散点拟合结果,对小球的球心定位误差为0.49%,球面采样点平均误差为0.83%.
2.2柔性气球轮廓识别
柔性气球的轮廓识别实验方案和刚性铁球的实验方案一样,由5个换能器组成的线性阵列绕气球1周进行回波探测.接收换能器接收到气球回波信号如图5所示.从图5中可以明显地看出,气球的回波有2个波形,这是由于气球表面相对于铁球是柔性表面,频率较高的超声波一部分被气球的前表面反射,另一部分穿过气球前表面后被气球的后表面内壁反射,因此形成大小不同的2列回波.由2列回波之间的时延τ和声波速度v可以得到声波在气球中的往返距离D=v τ,从而求出气球的直径d=v τ/2.
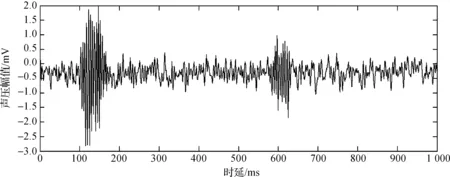
图5 气球回波信号
实验时水箱里的气球图片和回波处理后的气球轮廓如图6所示.由气球散点回波处理后得到的气球二维声图像和气球实际轮廓具有高度的相似性.图6中的气球声图像顶端没有回波散点,主要原因是此处的气球曲率较大,导致入射声波反射角度较大,没有接收到有用回波信号.
此外,通过对比刚性小球和柔性气球的回波信号强度发现,刚性小球的回波声压幅值为5 mV左右,柔性气球的回波强度为2 mV左右.这主要是因为两者的材料不同,引起散射强度不同.回波亮点强度变化主要由目标形状、材质和内部结构等重要特征决定,该特征对于水中刚性目标回波与柔性目标回波的识别具有重要意义[4].
3结束语
本文利用水下目标声学亮点模型理论,采用线性换能器阵列发射超声波扫描水下目标,通过接收到的目标声学回波信号建立了刚性小球的三维散点声图像和柔性气球的二维轮廓图,在一定程度上较好地重构出水下刚性和柔性目标的特征;分析对比刚性小球和柔性气球回波强度,识别出刚性目标和柔性目标回波强度的差异;但由于水声信道的复杂性,使得声成像技术在水声领域的应用还有一定难度.在下一步的研究中,还需要考虑信号多途、混响等因素对声波信号的影响,探索出最佳的信号噪声处理方法,并应用到水下目标三维声成像技术中.
参考文献
[1]唐利娜.水下三维声成像及声纳图像处理技术研究[D].哈尔滨:哈尔滨工程大学,2009.
[2]张德俊.声成像的研究进展及应用前景[J].科技导报,1994(9):15-18.
[3]桑恩方,张小平,苏龙滨.三维成像声呐的设计与实现[J].哈尔滨工程大学学报,2003,24(3):241-244.
[4]丁迎迎.海底物体回波模拟与图像生成技术研究[D].西安:西北工业大学,2006.
[5]汤渭霖.声呐目标回波的亮点模型[J].声学学报,1994,19(2):92-100.
[6]陈云飞,李桂娟,王振山,等.水中目标回波亮点统计特征研究[J].物理学报,2013,62(8):084302.
[7]HICKLING R. Analysis of echoes from a solid elastic sphere in water[J]. The Journal of the Acoustical Society of America, 1962, 34(10): 1582-1592.
[8]李昌志,田杰,张扬帆,等.基于亮点模型的典型水下目标回波信号仿真[J].应用声学,2010,29(3):196-201.
Preliminary Experiments of Acoustic Detection and Recognition of Underwater Target
QIN Huawei, FAN Xianghui, HU Hangmin, YANG Hongsheng
(SchoolofMechanicalEngineering,HangzhouDianziUniversity,HangzhouZhejiang310018,China)
Abstract:Introduce underwater 3-D imaging technology and basic principle, it designed a linear transducer array system according to echo highlight of model in this paper; the system can receives a series of echo signals about underwater target by transmitting acoustic signal, then the echo signals are produced by computer and compose 3-D acoustic image of target. Second, it analyzed the difference of echo scattering intensity of rigid-target and non-rigid target. The experiment results show that the model of echo highlight was practicable and can be used in some practical situations.
Key words:underwater target; acoustic detection; echo highlight; echo intensity
DOI:10.13954/j.cnki.hdu.2016.04.013
收稿日期:2015-11-27
基金项目:国家自然科学基金重点资助项目(41276092)
作者简介:秦华伟(1976-),男,山西长治人,教授,海洋机电装备.
中图分类号:P733.23
文献标识码:A
文章编号:1001-9146(2016)04-0062-04
