卫星导航系统接收机原理与设计
——之七
2016-07-13 09:01:12刘天雄
卫星与网络 2016年5期
+ 刘天雄
卫星课堂
卫星导航系统接收机原理与设计
——之七
+ 刘天雄
4.5.5 信号多路相关处理 Multicorrelator
如前述,为了获得与接收到的所有导航信号保持同步(synchronization),对接收到的导航信号的相关处理是卫星导航接收机实现其功能的关键环节。然而,仅仅对接收到的导航信号开展一次相关处理是不足以完成上述信号同步要求的,实际上,为了与接收到的导航信号保持同步,或者说是为了提高伪距观测量的计算精度,商业市场上即使是最简化的卫星导航接收机也需要开展多路相关处理。
4.5.5.1 基本概念Concept
基带信号处理的基本概念是通过对接收机本地复制的伪随机测距码(PRN码)信号与接收到的导航PRN码信号进行相关处理(signal correlation)。为了得到接收到的导航信号的多普勒频移以及伪随机测距码相位的估计值,接收机需要不断地移动(shift)和调整(adjust)本地伪随机码产生器的相位,使本地复制伪码信号与接收到的卫星伪随机码信号的相位对齐(aligned),从而完成对该卫星信号的跟踪和锁定。
一般接收机解扩卫星导航信号时,码元跟踪环一般采用超前相关器(Early correlator)、滞后相关器(Late correlator)和即时相关器(Prompt correlator)跟踪码元,通过比较超前相关、滞后相关和即时相关器的输出,就可对导航信号进行精确跟踪。本地复制伪码信号与接收到的卫星伪随机码信号的相位完全对齐时,通常称为即时相关,一般卫星导航接收机基带数字信号相关处理流程如图42所示。

图42 一般卫星导航接收机基带数字信号相关处理流程
·即时相关器(Prompt correlator);本地复制伪码信号与接收到的卫星伪随机码信号的相位完全对齐,简称P相关器;
·超前相关器(Early correlator);本地复制伪码信号的移位超前于即时复制信号,简称E相关器;a replica that is shifted earlier in time than the prompt replica
·滞后相关器(Late correlator);本地复制伪码信号的移位滞后于即时复制信号,简称L相关器;a replica that is shifted later in time than the prompt replica
其中,即时相关器采用的扩频码序列与带接收信号扩频码没有超前及滞后关系,即没有相位偏差,因此是带接收信号扩频序列的相干复制。一般通信系统中,没有相位偏差,就称为“相干”,有相位偏差,就称为“非相干”。
4.5.5.2 信号多路相关处理结构图Block Diagram
导航接收机每个通道的基带处理模块结构如图43所示,其核心是相关器,图41给出了信号相关处理流程,包括接收信号的实部(同相I支路分量)和虚部(正交Q支路分量),跟踪环路利用相关输出结果进一步计算伪码延迟和多普勒频移新的估计值。
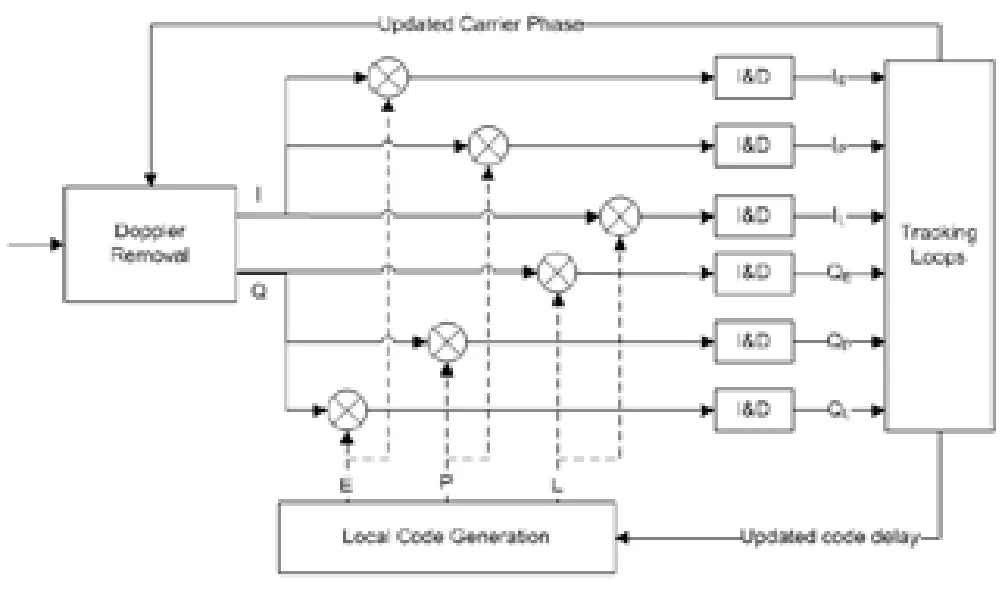
图43 导航信号多路相关处理
接收机通过不断调整伪码延迟量以生成新的本地复制伪码信号,并不断调整多普勒频移模块以去除接收信号的多普勒频移,上述调整是一个迭代过程,接收机连续给出信号相关结果。“I & D”为“积分和清零(Integrate and Dump)”模块,用于对信号相关输出结果积分,其结果要么是相干的(coherently),要么是非相干的(non-coherently)。
同时,环路锁定检测器(lock detectors)并行利用上述信号相关输出结果评估接收机对导航信号的跟踪状态(锁定还是未锁定)。这进一步证实,在噪声环境下,跟踪环路也许会偏离实际的相关峰值,否则一定会发生错误捕获(false acquisition)。
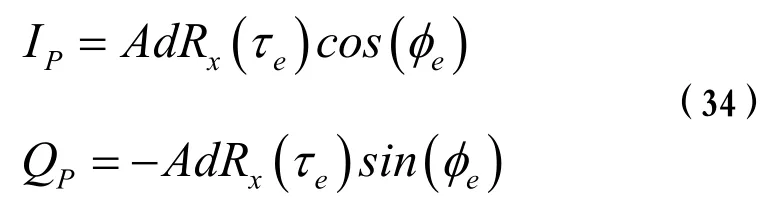
4.5.5.3 数学模型Mathematical Model
忽略噪声,即时相关器输出结果为:
超前相关器和滞后相关器输出结果为:
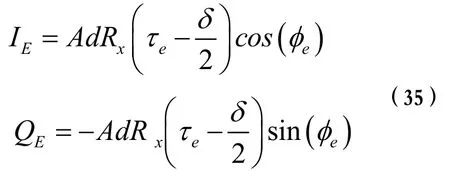
式中,
E,P,L分别代表接收机估计的超前相关、即时相关和滞后相关;
是接收机超前相关器和滞后相关器的间隔;
A是信号幅值;
d是导航电文;

φ是所接收导航信号的初始相位;
4.5.6 信号跟踪环路Tracking Loops
卫星导航接收机的目标是使得接收到的导航信号与接收机本地复制的信号保持同步,尽可能地精确地估计出接收到的导航信号在空间的传播距离。接收机跟踪环路用于连续跟踪并更接收到的导航信号的载波相位(carrier phase)和伪码延迟(code delay)估计值,在累加器(accumulators)一个积分时间间隔T内,跟踪环路对上述参数更新一次,使得接收信号与本地复制信号保持同步。由此,导航接收机使用伪码相位和载波频移两个跟踪环路跟踪导航信号。接收机跟踪环路参数决定了接收机正确跟踪导航信号的能力,并影响信号处理精度,因此,设计跟踪环路是规划接收机系统性能的首要任务。跟踪技术是整个GPS系统的关键技术,其性能的好坏直接影响着GPS 接收机性能的优劣。
进入跟踪状态的初始条件是导航信号已经捕获,信号捕获后接收机即可获得载波信号多普勒频移和伪随机测距码相位的粗略估计值,其中载波误差一般不超过500hz,伪码偏移不超过半个码片,因此,导航信号捕获只是实现了信号载波频率和伪码相位的粗略估计,也称“粗同步”。然后进入信号跟踪环节,相位锁定环PLL(Phase Lock Loops)和延迟锁定环DLL (Delay-Lock-Loop)从粗略估计值开始,通过反馈环路逐步将多普勒频移和伪码相位两个信号参量牵引到误差允许的范围内。卫星导航接收机跟踪环路基本结构框图如图44所示。
此外,由于导航卫星在空间轨道高速运动,造成卫星导航信号也发生动态变化,一是由于多普勒效应引起的载波频率的动态偏移;二是C/A码的相位会随着卫星和接收机间的距离的变化而变化。因此信号的跟踪环路必须要克服这些影响,跟踪电路在信号捕获的基础上进一步利用延迟锁定环DLL和相位锁定环PLL分别对码相位和载波频率进行更精确的同步,不断地调整本地载波和伪码相位的值,使它始终跟随着输入信号相位的变化,实现信号载波频率和伪码相位的精确估计,也称“精同步”。
4.5.6.1 跟踪流程Block Diagram
为了从接收到的导航信号中解调出导航、定位和授时信息,接收机通过不断调整本地复制的伪码测距信号的伪码延迟和载波相位,利用相关处理算法,导航接收机使用伪码和载波相位两个跟踪环路(code and carrier tracking loops)跟踪导航信号。确保接收到的导航信号与接收机本地复制的信号保持同步,导航接收机跟踪环路基本结构框图如图45所示。
跟踪环路包括:
积分和清零模块I & D (Integrate and Dump):累积相关器的输出,给出I支路同相分量(In-phase components)和Q支路正交分量(Quadrature components);
鉴别器(Discriminators):处理相关器的输出,给出载波相位信息等参数的量化观测量;
滤波器(Filters):对鉴别器的输出进行滤波处理,以降低输出噪声;
数控晶体振荡器NCO(Numerical Control Oscillators):将滤波器输出转换成为多普勒频移和伪码延迟相关可用的修正因子(correction factors),修正因子分别反馈给多普勒频移去除模块和本地伪码生成模块;
当伪码跟踪环路(code tracking loops)利用延迟锁定环DLL(Delay Lock Loops)跟踪接收到的导航信号的伪码延迟(code delay)时,载波跟踪环路(carrier tracking loops)要么利用相位锁定环PLL(Phase Lock Loops)跟踪接收到的导航信号的载波相位(phase),要么利用频率锁相环FLL (Frequency Lock Loops)跟踪接收到的导航信号的多普勒频移(Doppler frequency)。尽管如此,接收机需要配置频率锁相环FLL和相位锁定环PLL以跟踪载波相位和多普勒频移,开展接收机设计时需要权衡跟踪环路的规模。
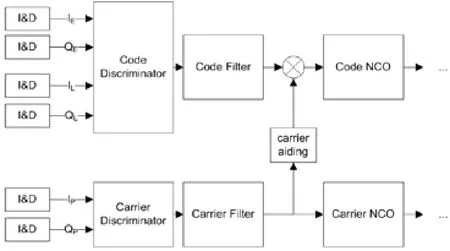
图45 导航接收机跟踪环路基本结构框图
例如,积分和清零模块I & D中积分的时间数需要在精度和接收机动态稳健性之间作出权衡,一方面,积分的时间越长,导航信号与本地复制信号的信号相关输出噪声越小;另一方面,积分的时间越短,对动态应力误差(dynamic stress error)越不敏感。
(1) 环路滤波器Loop Filters
环路滤波器的目标是滤除鉴别器的输出噪声,并将处理结果反馈给数控晶体振荡器NCO,数控晶体振荡器NCO将滤波器输出结果与原始接收导航信号相减,生成多普勒频移和伪码延迟修正因子,修正因子被反馈到接收机基带信号处理通道的起始点,即多普勒频移去除模块和本地伪码生成模块,由此进一步更新当前的估计值。
为了确定对接收信号的响应特性,设计环路滤波器时需要考虑滤波器的阶数和带宽,一般来说,滤波器噪声带宽和积分时间有如下关系:

如果滤波器噪声带宽和积分时间不满足上述关系式,那么噪声带宽将大于期望值,并导致滤波器工作状态不稳定。不同带宽环路滤波器,在t=2s时刻接收信号发生相位跳变时,环路的响应特性如图46所示,滤波器噪声带宽越窄,清零模块I & D中积分的时间越长,由此相关输出噪声越小。
考虑滤波器阶数时,滤波器阶数越高,滤除跟踪环路的视线LOS(Line-Of-Sight)动态应力误差的能力越强,一般有如下规律:
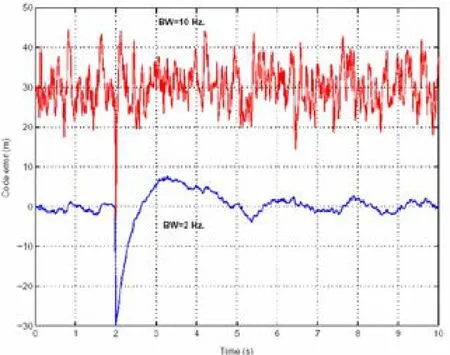
图46 滤波器噪声带宽对接收信号相位跳变的响应特性
一阶滤波器对速度应力误差(velocity stress)敏感;
二阶滤波器对加速度应力误差(acceleration stress)敏感;
三阶滤波器对加加速度应力误差(jerk stress)敏感。3rd order filters are sensitive to jerk stress
高阶滤波器的主要缺点是增加了滤波器的计算负担,此外滤波器阶数也影响滤波器带宽设计,例如,为了确保滤波器工作状态的稳定性,三阶滤波器设计方案要求滤波器噪声带宽在18 Hz以下。
(2) 载波辅助跟踪carrier-Aiding
由于伪码跟踪环路是对扩频码进行跟踪,其码元鉴相器输出有一个天然的自噪声(即使跟踪没有热噪声的扩频码,该自噪声也存在,且比热噪声大几个数量级),因此造成伪码跟踪环路锁定后,伪码跟踪环路抖动(code loop jitter)要远远大于载波跟踪环路抖动(carrier loop jitter)。载波跟踪环路抖动小,意味着跟踪精度或者说测量精度高,因此可以利用载波跟踪环辅助伪码跟踪环。
即,可以根据载波跟踪环路的测量结果,去除伪码跟踪环路的视线LOS动态应力误差,并降低环路滤波器阶数,提高滤波器噪声带宽。由此,可以将三阶PLL相位锁定环环路路滤波器的输出信息反馈给二阶DLL延迟锁定环环路滤波器,与单独采用三阶DLL延迟锁定环环路滤波器实现的性能相当,这种技术被称为载波辅助跟踪技术(carrier-aiding)。因为信号多普勒频移与信号波长成反比例,所以锁相环滤波器的输出信息反馈给延迟锁定滤波器之前,锁相环滤波器的输出信息还要乘以标定因子(scale factor)。

利用外部惯性测量传感器是去除跟踪环路高阶滤波器动态应力误差的另一个办法,即利用惯导等外部传感器测量结果,可以减低环路滤波器的阶数。
(3) 矢量处理 Vector Processing
传统卫星导航接收机的跟踪环路,即每个基带数字信号处理通道的伪码延迟锁定环DLL(Delay Lock Loops)是独立工作的,每个伪码延迟锁定环DLL给出所跟踪到的某颗卫星的伪距观测量。矢量延迟锁定环VDLL(Vector Delay Lock Loops)的概念在于伪距(pseudo-range)本质上不再是一个观测量,与传统接收机相反,导航接收机观测不同导航卫星的信号和。因此,可以利用信号相关输出结果计算伪距观测量。
例如,信号矢量处理技术(vector processing techniques)已用于接收机估计不同卫星的多普勒频移,将多普勒频移数据反馈到相位锁定环PLL后可以降低相位锁定环环路滤波器的带宽。信号矢量处理技术可以降低所有基带数字信号处理通道的噪声,确保接收机根据滤波器动态应力误差设计跟踪环路带宽。此外,只要导航接收机视场范围内导航卫星数量足够多,那么信号矢量处理技术可以应对某一颗卫星信号的阻断问题,其效果相当于仅仅是增加了其他基带数字信号处理通道的噪声。然而,信号矢量处理技术也有不足之处,例如在城市峡谷等信号多路径干扰比较严重的场景,信号矢量处理结果被多径信号“污染”。
猜你喜欢
杭州电子科技大学学报(自然科学版)(2023年3期)2023-06-30 06:57:34
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
上海公路(2018年4期)2018-03-21 05:57:46
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
探测与控制学报(2015年4期)2015-12-15 15:00:50
电测与仪表(2014年8期)2014-04-04 09:19:36
陕西理工大学学报(自然科学版)(2014年6期)2014-03-25 00:37:44
陕西理工大学学报(自然科学版)(2014年6期)2014-03-25 00:37:44