
基于角点的动态背景下运动目标检测算法改进
2016-07-09 15:39肖春明
现代电子技术 2016年7期
肖春明

摘 要: 由于动态摄像机行为造成了背景模糊等问题,结合角点矩特征的全局运动估计算法,将最大类间方差法引入RANSAC估计算法,对常用的RANSAC算法进行改进。在目标检测过程中,利用基于差分相乘原理的运动目标检测算法实现了运动目标的检测定位。针对获取到目标位置的后续帧序列的目标检测,提出了基于改进的奇异值分解的角点匹配的运动目标检测算法。实验表明,提出的算法对于背景发生变化的场景,能达到较好的背景运动补偿效果,在随后测量的动态背景状态下,可以准确检测后续帧序列的运动目标,并且具有良好的鲁棒性。
关键词: 目标检测; 全局运动估计; 角点; 奇异值分解
中图分类号: TN911.73?34 文献标识码: A 文章编号: 1004?373X(2016)07?0066?05
Abstract: To resolve the indistinct background problem caused by dynamic camera behavior, and in combination with the global motion estimation algorithm of angular point distance feature, the maximum interclass variance method is introduced into the RANSAC estimation algorithm to improve the common RANSAC algorithm. The moving object detection algorithm based on difference multiply principle is used to detect and locate the moving object in object detection process. Aiming at the object detection of follow?up frame sequence of the obtained object location, the moving target detection algorithm based on angular point marching of improved singular value decomposition is proposed. The experimental results demonstrate that the proposed algorithm has good background motion compensation effect in dynamic background, and can accurately detect the moving target of the follow?up frame sequence in the subsequent measured dynamic background measurement. The algorithm has good robustness.
Keywords: target detection; global motion estimation; angular point; singular value decomposition
0 引 言
运动目标检测是计算机视觉最主要的研究方向和难点之一[1?2],主要涉及到图像理解、模式识别、人工智能、自动控制和机器视觉等有关专业学科和领域的知识,并且已经被广泛地应用到很多场合 [3]。运动目标检测为后续的目标跟踪和目标识别奠定了良好的基础。在现实生活中,大量有意义的视觉信息包含在运动之中,人类可以凭借自身强大的视觉系统获取80%的信息[4],通过大脑的分析判断出运动目标,而对于计算机视觉而言,从获取视频到分析出运动的物体成为关键问题。
基于视频的目标检测系统具有结构简单、隐蔽性好、抗干扰能力强的优点,而且视频检测系统采用价格低廉的摄像机和光学成像结构,具有更高的性价比。通过摄像机采集回来的图像信息,可以获得关于运动目标的丰富信息,具有很高的直观性和可靠性。因此,研究运动目标检测的有关问题,在理论上和应用价值上都具有重要的意义。
1 基于角点矩特征的背景运动补偿算法
1.1 基于Harris算子的角点矩特征的提取及匹配设计
Harris[5]算子是在 Moravec算子的基础上进行改进的。因此,它也是一种基于信号的特征点提取算子。通过在图像位置建立局部窗口,监测窗口各个方向的能量数值和变化。对图像亮度改变具有无关性,算法只关注梯度。因此系统运动后只发生了方向的改变,系统具有旋转稳定性。同时,Harris特征点提取算子适用于角点数目较多并且光源复杂的情况。但是,Harris角点不具有尺度不变性。因此本文引入不变矩特征对其进行改良。Hu最早提出了几何矩特征,1962年,他在几何不变量理论的基础上提出了几何矩的概念[6]。Hu构造了7个不变矩并证明了相应的矩组对于平移、旋转和缩放变换的不变性。
本文将角点和矩特征进行结合,以弥补Harris角点不具备缩放不变性的缺点,提高角点的稳定性,从而可以实现在视频序列中存在平移、旋转和缩放时,具有一种稳定的特征进行全局运动估计和补偿,最终实现准确的运动目标检测。在视频序列中角点矩特征的提取步骤主要分为:
(1) 在每一帧图像中提取Harris角点;
(2) 在获得角点的[W×W]的邻域内进行矩特征的计算,即得到一个7维的图像特征向量。
在实现角点矩特征向量的提取后,需要对已提取的特征向量进行帧间的匹配。角点矩特征向量的匹配原理是:视频序列中存在仿射变换时,矩特征对仿射变换具有不变性,因此对应角点特征向量的矩值是相等的或者是相近的,对于误匹配的角点向量的矩值存在较大变化。
本文中采用计算特征向量之间的欧式距离进行角点矩特征的匹配。即寻找特征向量在待匹配向量集中与其欧式距离最小的向量且该距离小于设定阈值[T,]如果满足条件则该特征向量对相互匹配,否则从初匹配特征向量集中删除该特征向量。将匹配的特征点集作为运动信息的表达,便于进行参数估计的计算。在角点矩特征点集中既包含有背景点,又有前景点,也就是进行鲁棒的参数估计所指的内点和外点。把提取出的角点矩特征点集作为待估计点集,如何将该点集中的外点去除,是进行全局运动估计的关键。
1.2 基于改进的RANSAC全局运动估计算法
传统的RANSAC算法是将所有的点都代入参数估计模型,将估计残差大于所选阈值的点作为外点,迭代[N]次,最终求得所有的内点。但是外点数据在迭代过程中对估计精度会造成影响,而且在摄像机存在旋转运动时,仿射模型对外点的敏感加强[7]。因此,为了提高全局运动估计的精度,本文将最大类间方差引入RANSAC。
首先,利用RANSAC算法进行全局运动参数的初始值估计。然后,计算每个点的估计残差[r:]
在本文中,把从图像中提取出的[n]个角点矩的特征点作为全局运动估计的点,设其残差点集为[R={r1,r2,…,rn}]。令阈值[Tr∈R,]根据残差值的大小将点集残差分为两类:
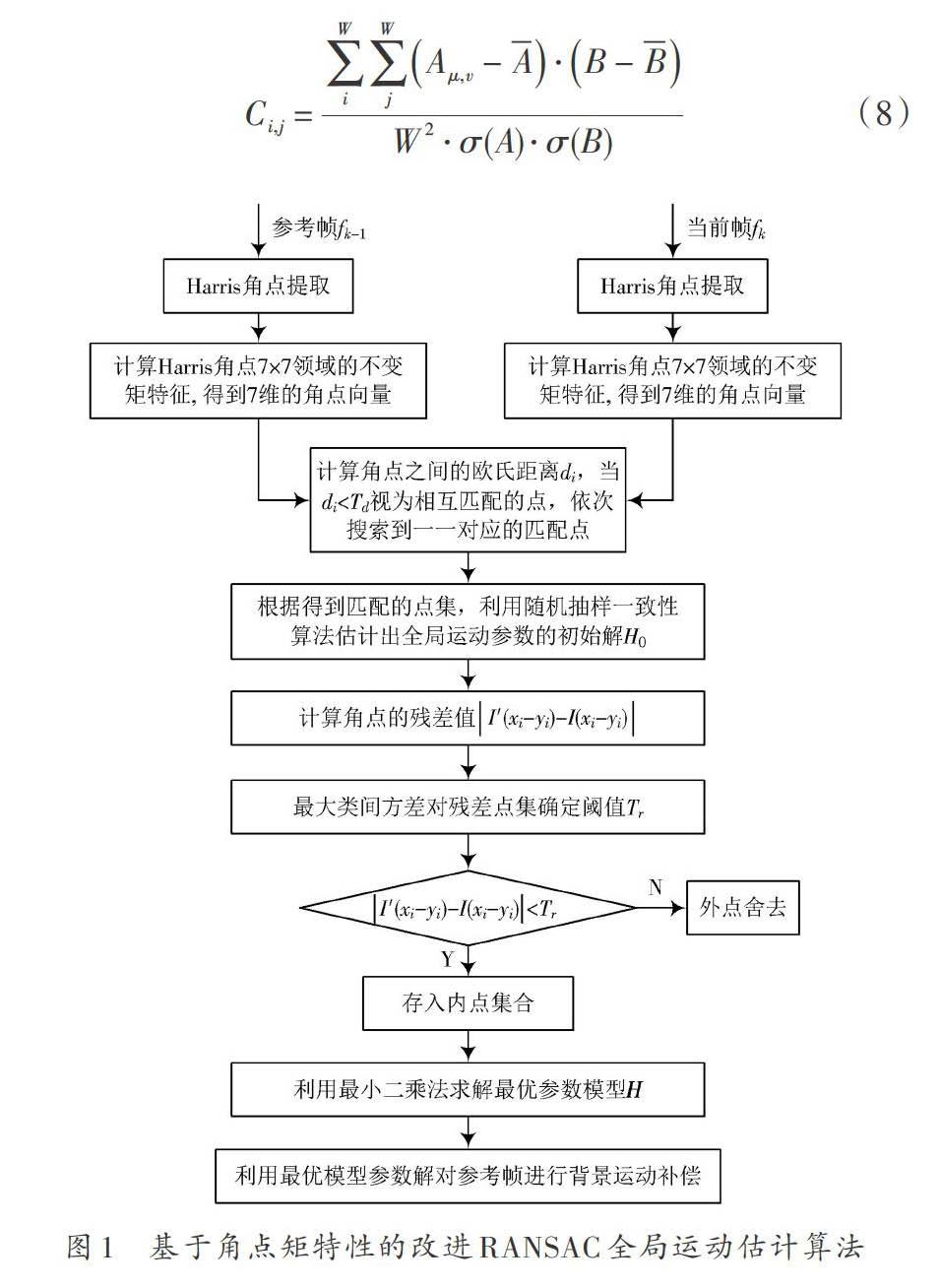
本节详细阐述了角点矩特征的提取及匹配、基于角点矩特征改进的RANSAC全局运动估计及补偿的过程,其流程图如图1所示。
2 运动背景下基于特征的运动目标检测
2.1 角点匹配的基本原理
角点匹配的基本原理通过确定图像[J]和图像[I]的单独相应的组点,在无误确定相应的点特征的情况下,算法可以进一步进行最优匹配,完成图像最终的匹配。
相匹配的特征点对由于矩阵[P]和[G]具有一致的结构被进一步突出,这种结构具有抑制非对应的特征。
当矩阵[P]中的元素[Pi,j]既是所在列所有元素中的最大值,同时也是所在行所有元素中的最大值,相互对应的特征点则为特征点[Ii]和[Jj,]当元素[Pi,j]不具备上述特征时,则说明[Ii]和[Jj]不匹配[8]。
2.2 改进的角点匹配的运动目标检测算法
本文提出的改进的基于奇异值分解的角点匹配算法,核心思想是通过改变该算法中涉及到的相似矩阵构造相关系数,达到适用于运动目标角点匹配的目标,解决了由于运动目标位置变化导致待匹配的两组角点中正确配对的角点之间距离相关性降低,造成误匹配角点对的问题。其核心流程如图1所示。
由式(9)可以看出,在相似矩阵构造过程中,上述的核心匹配方法考虑了距离的影响。然而,误匹配角点的数量增加,多数由于运动目标位置的变化导致待匹配的两组角点中正确配对的角点之间距离相关性降低。正确描述这些对应的特征点是研究的关键所在。在式(9)中,基于奇异值分解的角点匹配算法使用公式[r2i,j=Ii-Jj]描述两点之间距离的相关性,即两个特征点[Ii]和[Jj]之间的欧氏距离。然后,针对运动目标,两个特征点之间的欧式距离不能准确描述两点之间的距离相关性。
式中:目标运动的距离估计通过目标运动区域预测中心与模板中心在[y]轴和[x]轴的差值分别用[Δcenter x]和[Δcenter y]表征。系统针对目标运动中心位移及区域的预测使用Kalman滤波算法进行。
通过四个主要步骤,基于奇异值分解的角点匹配算法可以改善运动目标的检测:
(1) 确定目标模板。通过上一节全局运动补偿后,且经过基于差分相乘原理的运动目标检测获取形心位置来捕获得到目标区域。将视频序列中测量的运动目标的矩形区域作为目标模板,然后检测目标角点。
(2) 确定目标预测区域。使用Kalman滤波预测下一帧目标位置的特征点作为目标模板的中心,从而得到目标预测区域,最终获取检测角点。
(3) 确定偏移距离。通过步骤(1)和步骤(2)计算得到的角点进行匹配,再去除其误匹配角点,目标位置预测的特征点是由正确角点的聚类中心构成,由此计算目标预测中心与目标模板中心的偏移距离。
(4) 检测运动目标。利用改进的角点匹配算法进行角点匹配,同时检测当前帧中目标预测区域的角点,最后检测到运动目标并用矩形框标将其标注出来。具体的算法流程框图如图2所示。
运动目标检测流程图
3 算法仿真试验
3.1 基于改进的RANSAC全局运动估计算法验证分析
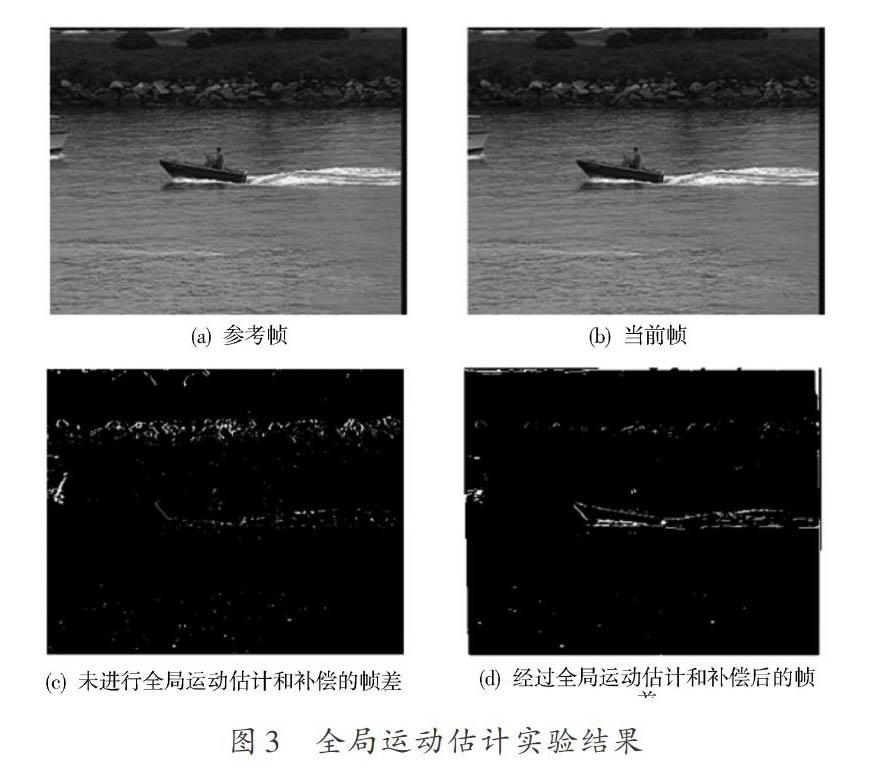
实验1:实验中对河流中船只运动的视频序列中连续的两帧进行全局运动估计和补偿。图3给出了视频序列上相邻两帧在完成全局运动估计和补偿前后的帧差。从图3中可以看出本文提出的全局运动估计和补偿算法能够将帧间的运动背景准确对齐。
实验2:为了证明基于RANSAC改进算法的效果,通过对比实验,详细分析了RANSAC算法和改进RANSAC算法的全局运动精度。通常采用相邻两帧完成全局运动估计和补偿后的峰值信噪比来衡量全局运动估计的精度,图中所示,在背景区域内随着差分图像[Id]非零像素点的不断降低,系统的信噪比PSNR不断升高的情况下,系统非零值不断减小,进一步证明了运动补偿算法的效果显著。本实验在视频序列1和视频序列2中分别提取了30帧图像进行信噪比的计算,图4为两种方法的信噪比对比图。
3.2 基于改进的奇异值分解的角点匹配的运动目标检测算法验证分析
实验是在3.1节中对相邻两帧进行了全局运动估计与补偿的基础上实现的。在对相邻帧进行了全局运动的估计和补偿后,可以按照静态背景下的运动目标检测算法检测并定位出运动目标,试验采用基于差分相乘原理的运动目标检测算法进行运动目标的检测和定位。然后,根据获得的运动目标形心,采用基于改进奇异值分解的角点匹配的运动目标算法进行后续帧的目标检测。
实验中对船只的视频序列进行后续的检测。首先对视频序列中连续的四帧进行全局运动估计和补偿,即在连续的四帧第10帧、第11帧、第12帧、第13帧中,估计第10帧和第11帧的全局运动,并进行全局补偿;同理,对第12帧和第13帧进行处理。图5(a)~(c)分别表示第10帧原始图像、第11帧原始图像、全局运动补偿结果。
图5(d)~(f)分别表示第12帧原始图像、第13帧原始图像、全局运动补偿结果。图5(g)~(i)分别表示第11帧与补偿帧的帧差二值图、第13帧与补偿帧的帧差二值图、差分相乘结果。图5(j),图5(k)分别表示对图5(i)进行形态学滤波处理、连通域分析,最终确定目标范围获取形心图。
图6中显示了获取形心后,利用改进的基于奇异值分解的角点匹配的运动目标检测算法对运动目标检测的6帧图像。可以看出该算法可以稳定的检测出运动目标,当背景中出现其他运动目标时,该算法依然能够保持良好的检测效果。
4 结 论
本文提出了基于角点矩特征的全局运动估计算法。此外,本文将最大类间方差的方法引入了随机抽样一致性估计算法中,改善了参数估计的精度,且在计算速度上有所提高。针对全局运动估计和补偿的复杂性,实际运动目标检测的实时性检测难以满足。本文提出了一种基于改进的奇异值分解的角点匹配的运动目标检测算法,该算法具有计算简单的特点,为运动目标检测系统的实时性实现奠定了基础。
参考文献
[1] FUJIMOTO L, YAMADA Y, MORIZONO T, et al. Development of artificial finger skin to detect incipient slip for realization of static friction sensation [C]// Proceedings of 2003 IEEE Conference on Multisensor Fusion and Integration for Intelligent System. [S.l.]: IEEE, 2003: 15?21.
[2] AZARBAYEJANI A, WREN C, PENTLAND A. Real?time 3?d tracking of the human body [J]. IEEE transactions on pattern analysis and machine intelligence, 1996, 19(7): 780?785.
[3] 谢文辉.动态场景下运动目标检测与跟踪算法研究[D].武汉:华中科技大学,2011.
[4] 章毓晋.图像工程(上册)[M].2版.北京:清华大学出版社,2005:1?10.
[5] HARRIS C, STEPHENS M.A combined corner and edge detector [C]// Proceedings of the 4th Alvey Vision Conference. Manchester: ACM, 1988: 147?151.
[6] HU M K. Visual pattern recognition by moment invariants [J].IRE transactions on information theory, 1962: 8(2): 179?187.
[7] WU Yiliang. An image matching method based on SIFT and SUSAN features [J]. Microcomputer & its applications, 2011(12): 33?35.
[8] CHEN Shuqiao. A corner matching algorithm based on Harris operator [C]// Proceedings of 2010 2nd International Confe?rence on Information Engineering and Computer Science. Wuhan, China: IEEE, 2010: 1?2.
猜你喜欢
电子技术与软件工程(2018年10期)2018-07-16
软件(2016年4期)2017-01-20
计算机应用(2016年12期)2017-01-13
科教导刊·电子版(2016年28期)2017-01-10
电子科技(2016年12期)2016-12-26
软件导刊(2016年9期)2016-11-07
科教导刊·电子版(2016年23期)2016-10-31
科学与财富(2016年28期)2016-10-14
系统工程与电子技术(2016年4期)2016-08-24
科技视界(2016年4期)2016-02-22
