改进的构建Wi-Fi位置指纹库算法研究
2016-07-04 09:47:42曾碧,毛勤
广东工业大学学报 2016年2期
曾 碧,毛 勤
(广东工业大学 1.计算机学院;2.广东省物联网与控制专用芯片及系统智能化工程技术研究中心, 广东 广州 510006)
改进的构建Wi-Fi位置指纹库算法研究
曾碧1,2,毛勤1,2
(广东工业大学 1.计算机学院;2.广东省物联网与控制专用芯片及系统智能化工程技术研究中心, 广东 广州 510006)
摘要:针对传统的位置指纹算法在更新位置指纹库时人力和物力巨大耗费的问题,提出利用压缩传感理论和重心拉格朗日插值算法来更新位置指纹库.压缩传感理论将指纹向量的重构过程转换为一个最小l0范数的优化问题,并通过最小全变分方法求解原始指纹向量.重心拉格朗日插值算法利用样本节点间的空间相关性,使得在离线阶段通过测量少量指纹就可重建位置指纹库.在真实室内环境的实验验证了压缩传感恢复算法比重心拉格朗日插值算法具有更好的定位性能.
关键词:RSSI; 压缩传感理论; 重心拉格朗日插值算法; 空间相关性; 最小全变分方法
无线传感器网络是一种全新的信息获取和处理技术,并以其低成本、低功耗、分布式和自组织等特点得到广泛应用.基于位置定位的服务(LBS)在现实生活中也越来越受到关注,人们对定位与导航的需求日益增大.虽然目前通用的GPS定位已经应用在很多领域中,但是GPS在特殊的环境中信号会中断,无法在室内环境中取得较高的精度,因此不适用于室内机器人的定位.相反,新兴的一些基于无线信号的室内定位技术相应出现,如无线局域网(WiFi)[1]、射频标签(RFID)[2]、超宽带无线电(UWB)[3]、紫蜂(ZigBee)[4]、蓝牙(Bluetooth)[5]等技术.从技术成熟与应用规模角度考虑, Wi-Fi定位无疑是当前最主流,也是未来最具发展潜力的室内定位技术.
目前所使用的室内无线信号定位算法大概分为两类:基于测距(range-based)和无需测距(range-free).前者通过测量节点间点到点的距离或者角度信息得到估计位置,常用的测距技术有接收信号强度(Received Signal Strength Indicator,RSSI)、TOA、TDOA[6]和AOA[7]等;后者根据网络的连通性等信息来估计节点的位置,典型的非测距模型有K最近邻法、DV-HOP法和质心法.RSSI信号易受环境(反射,多径传播)的影响,所以将RSSI值转化成距离的时候必然存在误差.比较而言,虽然RSSI测距误差比较大,但是节点有较好的硬件机制支持,并可以结合高斯模型[1]等一些滤波函数来提高其精度,且由电磁波信号衰减理论可知,同一方向的RSSI值是唯一的,因此可以作为定位环境中的位置指纹.由文献[8]可知,当采用三边测量定位算法的时候可能造成3个圆没有相交点的情况,使所得的非线性方程组无解,而文献[9]中位置指纹算法可以有效地解决这样的问题.
位置指纹算法包括两个阶段:离线采样与在线定位.离线采样阶段的主要生成包含有样本节点RSSI值的样本指纹库.传统方法是首先在空间中设置一系列样本点和若干个无线接入点AP(Access Point),通过多次测量收集样本点的RSSI值从而形成样本点的位置指纹库.在线定位阶段主要根据盲节点的RSSI值采用某种搜索匹配算法与位置指纹库中的数据进行匹配,传统的匹配算法如K最近邻法,文献[10]将模糊三角形定位的思想引入到基于RSSI室内定位中,在一定程度上提高了定位的精度.
传统构建位置指纹库的算法很简单,提前选择好室内测量的样本点,然后测量样本点与AP的RSSI值,存入数据库,这种方法虽然比较稳定,但是耗费比较大的人力和物力,并且如果一旦定位环境转移,样本节点的选择也要发生变化,那么数据库必须重新构建.在实际的定位过程中,当测量出一小部分样本点的RSSI值时,这些RSSI值不仅可以提供当前样本点的信息,而且也体现了这些样本点与周围环境的某种联系.因此利用样本点之间空间相关性,通过较少样本点的测量就可以建立一个比较密集的位置指纹数据库.文献[11]中提出利用地理学上的克里格插值算法和距离加权倒数空间插值法来构建位置指纹库,这两种算法虽然能够降低构建误差,但考虑需要耗费较多的计算时间,因此在实际环境中普及度不高.统计学上常用的插值法有牛顿插值、拉格朗日插值、分段插值、样条插值、Hermirtc插值[12].其中拉格朗日插值模型简单,结构紧凑,且重心拉格朗日插值算法插值计算更加简便,插值效果稳定.较之于其他插值算法比较适用于快速建立位置指纹库.
室内定位点的稀疏性使得压缩传感理论[13]同样能应用于构建位置指纹库.压缩传感理论主要包括信号的稀疏表示、编码测量和重构算法3个方面.信号的稀疏表示就是将信号投影到正交变换基时, 绝大部分变换系数的绝对值很小, 所得到的变换向量是稀疏或者近似稀疏的, 可以将其看作原始信号的一种简洁表达,信号重构过程一般转换为一个最小l0范数的优化问题, 然后通过原始信号与测量矩阵的乘积获得原始信号的线性投影测量. 最后, 运用重构算法由测量值及投影矩阵重构原始信号. 信号重构过程一般有最小l1范数法[14]、匹配追踪系列算法[14]、最小全变分方法[15]、迭代阈值算法[16]等.
1采用压缩传感构建位置指纹库
如果室内的AP数量为m,定位空间内n个样本点对应的RSSI向量均可以被测定,n个样本点的向量表达式R为:
(1)
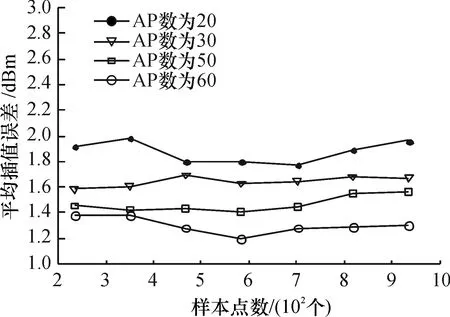
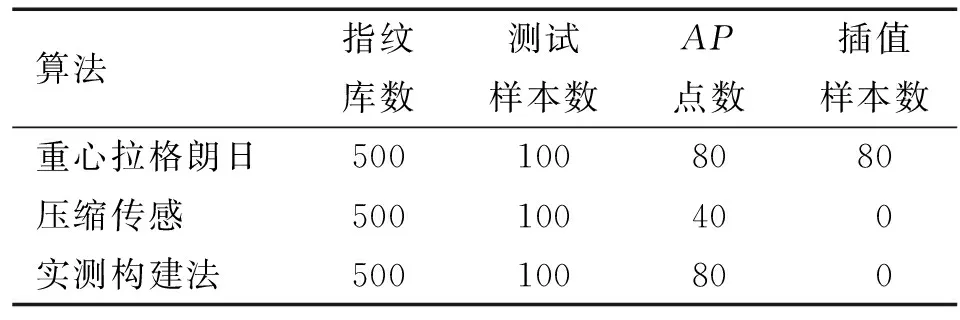
其中ri来表示i从k(k x=Fri. (2) 定义一个选择矩阵GM×N,用g′来表示G的每一行,是一个1×N的向量,所有元素都是0,除了g(n)=1,n是离线阶段被测量的AP节点的下标.简单来说,对某个位置而言,AP点的选择是无序的. 因此离线阶段的RSSI向量表示为 m=Gri=GF-1x=R. (3) 因为x是稀疏的,可以使用如下公式对其正交, T=QR†. (4) z=Tm=QR†Rx. (5) 其中Q=(RT)是正交化矩阵,R†是R的伪逆矩阵,使用全变分最小化[14]进行求解如下: (6) ri=F-1x. (7) 位置指纹库R中其他的样本点能够以同样的方式被恢复. 2采用重心拉格朗日插值法构建位置指纹库 在室内复杂的无线信号环境下,伴随着强烈的信号衰落和多径效应,很难建立一个符合实际应用的电磁波传播模型.目前较多应用的经验模型包括WAF模型和对数路径距离函数模型[17]. 对数路径距离函数模型如下: (8) 其中P(d)表示接收端接收到的信号强度,P(d0)表示在参考距离接收到的信号强度值,这是一个参考量.d0表示参考距离,d表示实际距离,n表示发射端到接收端之间的障碍因子,Xσ是高斯分布随机量.n和Xσ的值通过采集RSSI值拟合计算获得. 但在多次实际测量中,无线信号的经验模型并不完全符合实测数据,尤其是在距离较远的地方.基于此,首先建立样本点RSSI值和距离的关系方程为 (9) 其中RSSI表示样本节点与锚节点之间的信号强度值,d表示样本节点与锚节点之间的距离.笔者事先在定位空间中选取k+1个样本点,其中k+1 (d0,RSSIi0),(d1,RSSIi1),…(dk,RSSIik). 构建重心拉格朗日插值函数如下: (10) xi,xj是所有插值样本点与锚节点的距离.可以采用插值函数对位置指纹库中的另外n-k-2个未知点进行插值计算得到 在上述构建位置指纹库的方法中k的选取很重要,如果k的取值较小,则难以描述出定位空间的RSSI值分布;如果取值较大,则失去插值法的意义,除此之外k的取值还必须满足均向性. 3模糊位置指纹定位算法 由模糊识别理论可以计算出Rs隶属于哪一个样本点. 首先将采样向量Rs与n个样本的向量表达式进行归一化,即 (11) 然后采用欧几里德贴近度公式计算贴近度: (12) 其中 (i=1,2,…). 最后对所求得的αi=(Ri,Rs)进行排序,选取与s点贴近度最高的4个样本.再根据这4个样本点坐标位置的贴近度加权系数计算出未知节点的具体位置坐标. 设具有最高贴近度的4个样本点的贴近度依次是α1、α2、α3、α4.利用贴近度加权系数求取未知节点的坐标(X0,Y0,Z0). (13) (14) (15) 其中,βi是第i(i=1…,4)个样本节点的贴近度加权系数. 4实验 4.1实验环境和实验步骤 本次实验选取广东工业大学工学一号馆的5楼空间作为实验区域(约100m×25m),如图1所示.其中A区和B区是镂空区域,不存在定位需求. 为了验证本方案的定位精度以及实验的可重复性,在定位区域布置80个AP点作为测量插值样本节点的RSSI值的发射器,如图1所示.分别根据重心拉格朗日差值法和压缩传感对位置指纹库R进行恢复.然后根据本文中提供的模糊位置指纹定位算法计算得到位置估计. 具体实验如下: 图1 定位区域 80个AP摆在定位区域的任意位置,其坐标是确定的,在离线采样阶段,在定位空间中选取m(n 4.2实验过程 4.2.1重心拉格朗日插值 插值样本点的个数与样本点个数的选取对于插值的性能都有影响,依循等距的原则,在实验区域布置100个样本点.在此基础上笔者首先选取50个插值样本点进行计算,由于定位的区域较大和硬件条件的限制,样本节点不一定能够接收到所有锚节点的信号,如果信号缺省,以0作为此次接收到的RSSI值.分别改变插值样本点和样本点的个数,利用类似公式(16)计算出插值误差,得到的实验结果如图2所示,可以看出当样本点的数量保持不变,而增加插值样本点的数量时,平均误差随之减小;当插值样本点的数量不变时,增加样本点的数量,插值误差并没有出现明显的变化.表明重心拉格朗日插值算法在室内定位环境具备较好的稳定性. 根据图3可以看出在锚节点数为80、插值样本点数改变的情况下,重心拉格朗日插值算法较之于三次样条插值和分段插值在实验环境中具备明显的优势. 图2 重心拉格朗日插值误差 图3 不同插值算法误差比较 4.2.2压缩传感 为了减少在建库阶段需要测量的次数,可以通过压缩传感来重建位置指纹库.2.4G上802.11b/g的网络的波长是10~50m,在实验中,锚节点的布置间隔至少是1.5m.这说明位置指纹库并没有捕捉到方差,可以使用压缩传感理论进行信号恢复.随机选择20个AP点进行仿真实验,逐渐增加AP节点的数量,观察恢复结果如图4所示,用式(16)计算出误差平均值e. (16) 如图4所示,当AP节点增加时,平均误差逐渐减小,指纹向量恢复的效果越好. 图4 压缩传感指纹恢复误差 4.2.3模糊位置指纹定位 在图1所示的定位区域随机布置100个未知点进行实验,分别使用压缩传感与重心拉格朗日插值法构建位置指纹库.同时实测构建位置指纹库.使用3种指纹库进行定位实验.预置条件如表1所示. 由图2可得到样本点数为500,插值样本点数为80时,指纹向量平均误差是1.68dBm.由图4可知,在样本点个数为500,AP点的个数为50时,指纹向量的平均误差是1.47dBm,两者的差距接近.将以上两种算法建立的指纹库与实测建立的指纹库进行定位试验,在线阶段采用模糊位置指纹定位算法.分别记录下100个试验点的平均定位误差如图5所示. 表1 算法的预置条件 图5 定位误差比较 根据图5,利用实测得到的位置指纹库进行定位的平均误差低于利用压缩传感理论指纹库和重心拉格朗日插值指纹库进行定位的平均误差.实测指纹库的定位误差平均值是2.216 7m.压缩传感指纹库的平均定位误差是3.636 9m,低于重心拉格朗日插值算法的 4.972 6m,且有80%的未知点的定位误差在4m内.压缩传感指纹库比重心拉格朗日指纹库具备更加稳定的定位性能. 5结语 本文在现有的位置指纹定位算法基础上,提出使用压缩传感和重心拉格朗日插值两种算法来更新位置指纹库,减少在离线阶段所需耗费的人力和物力.同时在线定位阶段还引入了模糊匹配、模糊决策的思想.实际环境实验表明利用压缩传感理论构建的位置指纹库的定位性能高于重心拉格朗日插值算法建立的指纹库.然而,由于室内环境的复杂性,实验过程中的样本需求多样化,算法的自适应能力不高,这些问题将在以后的研究中改进.由于模糊匹配算法在位置指纹定位算法中有良好的效果,今后可将该算法应用于其他室内定位的场景. 参考文献: [1]HUANGJ,MILLMAND,QUIGLEYM,etal.Efficient,generalizedindoorWiFiGraphSLAM[C]∥RoboticsandAutomation(ICRA), 2011IEEEInternationalConferenceon.Shanghai:IEEE,2011:1038-1043. [2] 孙晓玲,李伟勤.基于RFID的二维室内定位算法的实现[J].现代电子技术,2010(24):90-92. SUNXL,LIWQ.Theimplementationof2-DindoorlocationalgorithmbasedonRFID[J].JournalofModernElectronicTechnology,2010(24):90-92. [3] 高睿劼,黄鲁,朱警怡.UWB室内定位系统的射频收发机设计[J].微型机与应用,2013(13):87-89. GAORJ,HUANGL,ZHUJY.DesignofRFtransceiverinUWBpositioningsystem[J].MicroComputer&Applications,2013(13):87-89. [4] 张顺扬.ZigBee无线传感器网络研究及仿真[D]. 广州:广东工业大学信息工程学院,2008. [5] 王睿,赵方,彭金华. 基于WI-FI和蓝牙融合的室内定位算法[J].计算机研究与发展,2011,48(S):28-33. WANGR,ZHAOF,PENGJH.CombinationofWI-FIandbluetoothforindoorlocalization[J].JournalofComputerResearchandDevelopment,2011,4(S):28-33. [6] 刘金龙.无线传感器网络TDOA定位算法研究[D].哈尔滨:哈尔滨工业大学电子与信息工程学院,2011. [7]WONGCM,MESSIERGG,KLUKASR.Evaluatingmeasurement-basedAOAindoorlocationusingWLANinfrastucture[C]∥20thInternationalTechnicalMeetingoftheSatelliteDivisionoftheInstituteofNavigation.Texas:FortWorthConventionCenter: [s.n.],2007,4:1139-1145. [8] 杨博雄,倪玉华,刘琨, 等. 基于加权三角质心RSSI算法的ZigBee室内无线定位技术研究[J].传感器世界,2012(11):31-35. YANGBX,NIYH,LIUK,etal.StudyonZigBeewirelesslocationtechnologybasedonweightingtriplecentroidRSSIalgorithm[J].SensorWorld,2012(11):31-35. [9] 朱山.室内无线传播及覆盖性能研究[D]. 武汉:华中科技大学电子信息与通信学院,2012. [10] 朱剑,赵海,林凯, 等. 基于WSNs的模糊三角形定位模型研究[J].东北大学学报,2010,31(1):35-38. ZHUJ,ZHAOH,LINK,etal.ResearchonthefuzzytriangularlocalizationmodelinWSNs[J].JournalofNortheasternUniversity,2010,31(1):35-38. [11]LIB,WANGY,LEEHK,etal.MethodforyieldingadatabaseoflocationfingerprintsinWLAN[J].Communications,IEEProceedings, 2005,152(5):580-586. [12] 权双燕,曹阳.插值法的应用与研究[J].科技信息,2007(36):413-414. QUANSY,CAOY.Interpolationmethodresearchandapplication[J].Science&TechnologyInformation,2007(36):413-414. [13] 李树涛,魏丹.压缩传感综述[J].自动化学报,2009,35(11):1369-1377. LIST,WEID.Asurveyoncompressivesensing[J].ActaAutomaticaSinica,2009,35(11):1369-1377. [14]TROPPJA,GILBERTAC.Signalrecoveryfromrandommeasurementsviaorthogonalmatchingpursuit[J].IEEETransactionsonInformationTheory, 2007, 53(12): 4655-4666. [15] 娄静涛, 李永乐, 谭树人,等. 基于全变分的全向图像稀疏重构算法[J].电子学报,2014,44(2):243-249. LOUJT,LIYL,TANSR,etal.Sparsereconstructionforomnidirectionalimagebasedontotalvariation[J].ActaElectronicaSinica,2014(2):243-249. [16]BLUMENSATHT,DAVIESME.Iterativethresholdingforsparseapproximations[J].JournalofFourierAnalysisandApplications,2008,14(5-6):629-654. [17] 叶蔚.室内无线定位的研究[D].广州:华南理工大学电子与信息学院,2010. [18] 彭越, 吴多龙,GuillaumeAndrieux,等. 基于最小能量法的无线传感器网络节点能量有效性研究[J]. 广东工业大学学报, 2014,31(1): 86-89. PENGY,WUDL,ANDRIEUXG,etal.Researchonenergy-efficiencyinwirelesssensornetworksbasedonminimumenergycoding[J].JournalofGuangdongUniversityofTechnology,2014,31(1):86-89. [19] 鲁叶,彭世国.T-S模糊随机时滞系统的鲁棒控制[J].广东工业大学学报,2013,30(1):68-72. LUY,PENGSG.RobustcontrolofT-Sfuzzystochasticsystemwithtime-delay[J].JournalofGuangdongUniversityofTechnology,2013,30(1):68-72. A Research on Algorithm of Building Wi-Fi Location Fingerprint Database Zeng Bi1, 2, Mao Qin1,2 (1.School of Computers; 2. Guangdong Provincial Research Center of Internet of Things, Control Special Chip and Intelligent System Engineering Technology, Guangdong University of Technology, Guangzhou 510006, China) Abstract:To solve the problem of high cost in updating the fingerprint database in terms of time and effort, the theory of compressed sensing and focus Lagrange interpolation algorithm are proposed in the offline phase. The process of fingerprint vector refactoring is transformed into the problem of minimum l0norm optimization by compressed sensing, and total variation is used to recover the original fingerprint vector. Focus Lagrange interpolation algorithm takes the advantage of spatial correlation of sample nodes, by which the fingerprint database can be rebuilt through measuring a small amount of fingerprints. Finally a practical experiment in real indoor environment shows that the theory of compressed sensing achieves higher accuracy than focus Lagrange interpolation algorithm. Key words:received signal strength indicator(RSSI); the theory of compress sensing; focus Lagrange interpolation algorithm; spatial correlation; total variation 收稿日期:2015-05-25 基金项目:国家自然科学基金资助项目(61173046);广东省自然科学基金资助项目(S2012040007326) 作者简介:曾碧(1963-),女,教授,博士,主要研究方向为嵌入式系统与智能技术、智能计算与智能机器人. doi:10.3969/j.issn.1007-7162.2016.02.010 中图分类号:TP391 文献标志码:A 文章编号:1007-7162(2016)02-0051-06