基于模糊自整定PID智能家居温度控制系统研究
2016-07-02 07:19魏立明邢文白
现代建筑电气 2016年5期
关键词:仿真
魏立明, 邢文白, 林 晶
(吉林建筑大学 电气与计算机学院, 吉林 长春 130118)
基于模糊自整定PID智能家居温度控制系统研究
魏立明,邢文白,林晶
(吉林建筑大学 电气与计算机学院, 吉林 长春130118)
摘要:针对温度控制系统的非线性和不确定性等特点以及常规PID的缺陷,提出一种模糊自整定PID控制系统的设计方法,实现对PID参数的在线调整,通过输出的控制量驱动相应的执行机构来调节房间内的温/湿度,从而达到控制的目的。在MATLAB/Simulink建立仿真模型,对比常规PID控制和模糊自整定PID控制的仿真曲线。结果表明,模糊自整定PID控制系统具有更好的鲁棒性和控制性能。
关键词:温度控制系统; 模糊自整定PID控制; 常规PID控制; 仿真
0引言
房间的温度受很多因素的干扰,如太阳辐射、照明设备、电气设备以及人自身所产生的热等,这些干扰因素存在着一定的不稳定性和季节变化性。常规的PID控制一般适用于线性系统,而针对一些非线性、不确定性系统,常规的PID控制效果不理想,而且不能根据实际情况实时调整PID参数[1]。
针对常规PID控制的缺点,本文提出了一种模糊自整定PID控制的设计方法,利用模糊逻辑控制工具箱对控制器进行在线调整,满足其控制要求。
1控制系统模型的建立
在温度控制系统中,通过安装在房间内的温/湿度传感器,检测室内外环境温/湿度等参数,将测量到的模拟信号转换为数字信号后送给控制器。控制器按照模糊PID算法对检测到的温差值和原设定的温差值的偏差进行运算,输出到信号控制变频器,再由变频器控制空调中风机的转速,改变风量,从而调节房间内的温度、湿度[2-3]。房间温度受室内、室外等各种因素影响,具有多干扰性和不确定性。因此温度控制系统采用带滞后环节的一阶简化模型,其传递函数为
(1)
式中:K——放大系数;
τ——纯滞后时间;
T1——时间系数。
2模糊自整定PID控制器的设计
2.1控制器原理及结构框图
模糊PID控制器是以温差e和温差变化率ec作为模糊控制器的输入,以PID参数Kp、Ki、Kd作为模糊控制器的输出,利用模糊控制规则对PID参数进行在线调整,通过输出的控制量,驱动相应的执行机构以减小偏差,直到把房间温度控制在允许范围内。模糊自整定PID控制器如图1所示。

图1 模糊自整定PID控制器
2.2模糊PID控制器的算法设计
将温差e和温差变化率ec模糊化后,得到模糊量E和EC。设模糊量E、EC和Kp、Ki、Kd的模糊子集均为{NB、NM、NS、ZO、PS、PM、PB},论域均为[-33],量化因子Ke=1,Kec=3,各输入输出均服从三角形隶属函数曲线分布。以温差e为例,隶属函数如图2所示。根据参数整定原则和实际操作经验,得到Kp、Ki、Kd模糊整定规则,如表1所示。

图2 隶属函数曲线

Kp/Ki/KdNBNMNSZOPSPMPBecNBPB/NB/PSPB/NB/NSPM/NM/NBPM/NM/NBPS/NS/NBZO/ZO/NMZO/ZO/PSNMPB/NB/PSPB/NB/NSPM/NM/NBPS/NS/NMPS/NS/NMZO/ZO/NSNS/ZO/ZONSPM/NB/ZOPM/NM/NSPM/NS/NMPS/NS/NMZO/ZO/NSNS/PS/NSNS/PS/ZOZOPM/NM/ZOPM/NM/NSPS/NS/NSZO/ZO/NSNS/PS/NSNM/PM/NSNM/PM/ZOPSPS/NM/ZOPS/NS/ZOZO/ZO/ZONS/PS/ZONS/PS/ZONM/PM/ZONM/PB/ZOPMPS/ZO/PBZO/ZO/PSNS/PS/PSNM/PS/PSNM/PM/PSNM/PB/PSNB/PB/PBPBZO/ZO/PBZO/ZO/PMNM/PS/PMNM/PM/PMNM/PM/PSNB/PB/PSNB/PB/PB
通过模糊推理,求得e、ec与Kp、Ki、Kd之间的模糊关系。控制系统采用最大隶属度法进行解模糊判决,从而得到ΔKp、ΔKi、ΔKd模糊调整规则,如表2所示。
表2ΔKp、ΔKi、ΔKd模糊调整

ΔKp/ΔKi/ΔKd-3-2-10123ec-33/1/-33/-3/-23/-3/23/-1/-12/-3/-11/-3/00/1/0-23/1/-33/-3/-23/-3/-13/-1/-12/-3/-00/-3/00/1/0-12/0/-22/-2/22/-2/-12/-1/01/-2/00/-2/0-1/0/-102/0/11/-1/11/-1/00/-1/0-1/-1/0-1/-1/-1-1/0/-111/0/10/2/0-1/1/0-2/0/0-2/1/1-2/2/2-2/0/220/1/00/3/0-2/1/0-3/1/1-3/3/1-3/3/2-3/1/230/1/01/3/0-2/2/1-3/2/1-3/3/2-3/3/3-3/1/3
通过实时计算出的温差e和温差变化率ec,从表2中分别查出PID控制器三个参数的修正量ΔKp、ΔKi、ΔKd,然后计算出PID的实际参数:
Kp=ΔKp+Kp0
Ki=ΔKi+Ki0
Kd=ΔKd+Kd0
(2)
式中:Kp0、Ki0、Kd0——参数初始值。
将Kp、Ki、Kd三个参数带入增量式PID算法,即可实现对温度的有效控制。
3MATLAB/Simulink仿真
根据建立的数学模型,设房间温度模型的传递函数[4]为
(3)
采用衰减曲线法整定PID参数,设定PID控制器的参数Kp0=8.55、Ki0=9.7、Kd0=0.0416。衰减曲线法整定PID控制器参数如表3所示,其中tr为上升时间,Ts为两个相邻波峰间的时间间隔。
表3衰减曲线法整定PID控制器参数

控制器类型衰减比例度δs/%积分时间微分时间P100∞0PI1202tr或0.5Ts0PID801.2tr或0.3Ts0.4tr或0.1Ts
在Simulink环境中,常规PID控制和模糊自整定PID控制的仿真模型如图3、图4所示。
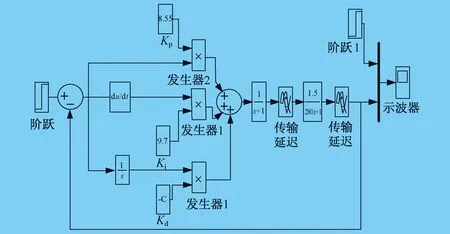
图3 常规PID控制仿真模型

图4 模糊自整定PID控制仿真模型
模糊自整定PID控制仿真模型中包括两个封装模块PID控制器和PID控制器1,它们的内部结构分别如图5、图6所示。

图5 PID控制器的内部封装
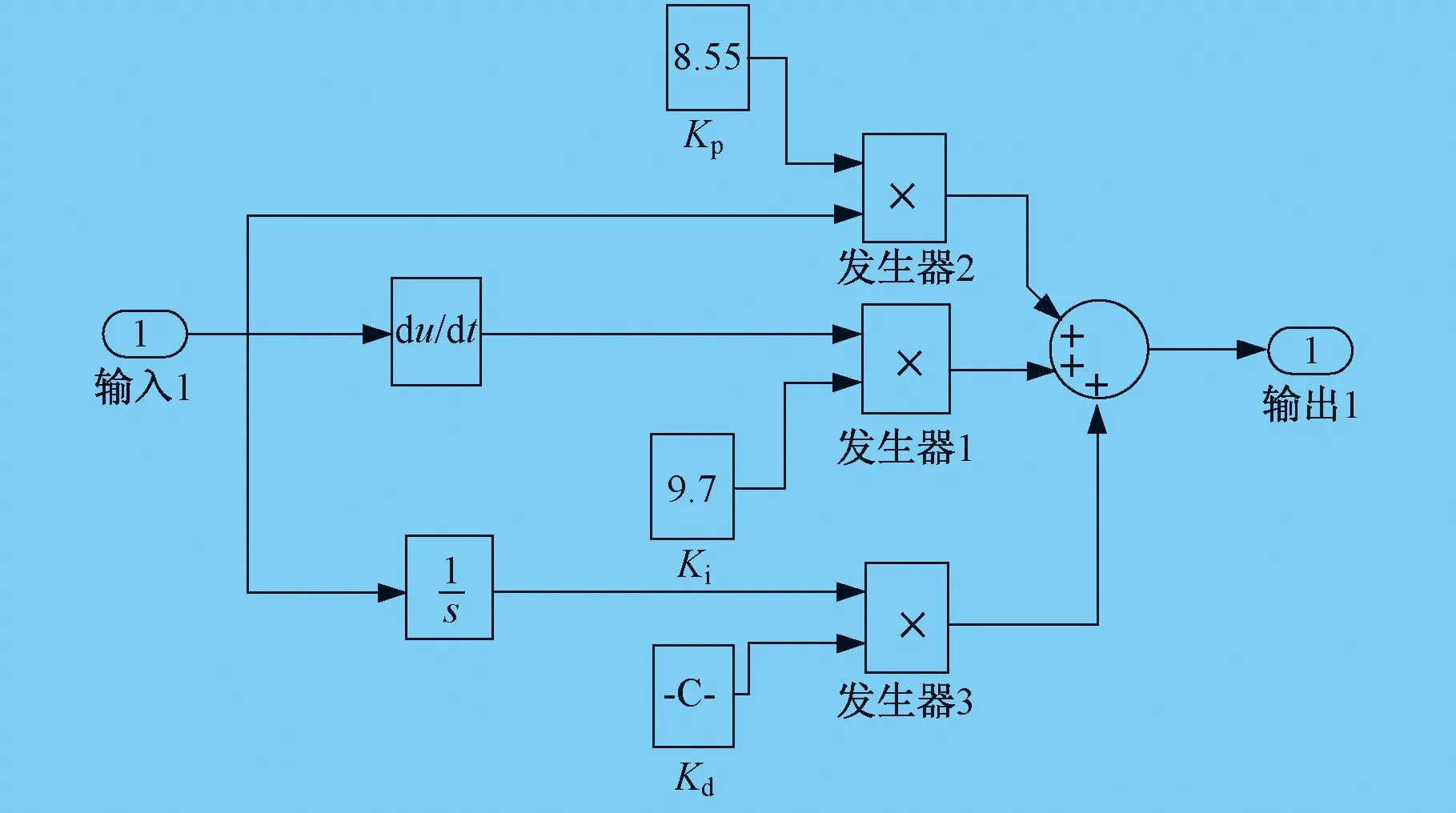
图6 PID控制器1的内部封装
设仿真时间为500 s,系统运行后仿真曲线如图7所示。
由图7可知,常规PID控制的最大超调量为33%,调节时间为300 s;模糊自整定PID控制的最大超调量为1%,调节时间为150 s,因此模糊自整定PID控制较常规PID控制的响应速度快,超调量小,具有更好的鲁棒性和适应性。
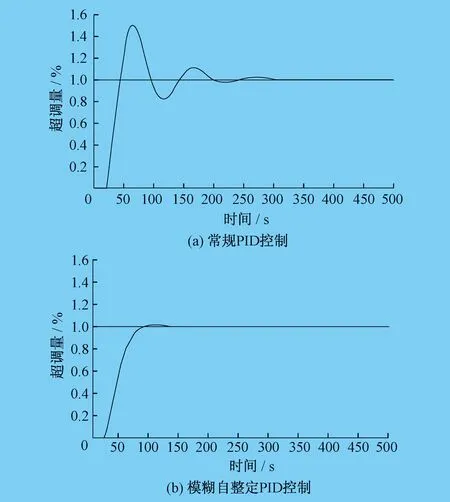
图7 系统运行后仿真曲线
4结语
针对复杂的温度控制系统,本文设计了模
糊自整定PID控制器,结合PID和模糊控制的优势,实现了对控制参数的在线修改。在Simulink环境中建立了常规PID控制和模糊自整定PID控制的仿真模型。仿真结果表明,模糊自整定PID控制系统具有调节时间短、超调量小、动态特性和控制效果好等优点,是室内房间温度控制系统的最佳选择。

[1]薄俊青.基于模糊自整定PID的中央空调温度控制系统设计[J].河北电力技术,2014,33(4):14-15.
[2]黄金侠.模糊自整定PID在工业温度控制系统中的应用与研究[J].长沙通信职业技术学院学报,2011,10(4):103-105.
[3]吕南南.基于模糊PID的通信机房温度调节节能系统的研究[D].哈尔滨:东北林业大学,2009.
[4]张德丰.MATLAB/Simulink建模与仿真实例精讲[M].北京:机械工业出版社,2010.
Research About Room Temperature Control System Based on Fuzzy Logic Self-turning PID
WEI Liming,XING Wenbai,LIN Jing
(School of Electrical and Computer, Jilin Jianzhu University, Changchun 130118, China)
Abstract:Aiming at the nonlinearity and uncertainty of temperature control system and the shortcomings of conventional PID,this paper proposed a new method of fuzzy logic self-turning PID control system,which realized the on-line adjustment of PID parameters.The output control volume drived the corresponding actuator to to control the temperature and humidity of room.A simulation model was established in MATLAB/Simulink,and the simulation curves of conventional PID control and fuzzy logic self-turning PID control were compared.The simulation results show that the fuzzy logic self-turning PID control system has better robustness and control performance.
Key words:temperature control system; fuzzy logic self-turning PID control; conventional PID control; simulation
中图分类号:TU 855
文献标志码:B
文章编号:1674-8417(2016)05-0001-04
DOI:10.16618/j.cnki.1674-8417.2016.05.001
收稿日期:2016-04-28
邢文白(1992—),男,硕士研究生,研究方向为建筑电气与智能化。
林晶(1990—),女,硕士研究生,研究方向为建筑电气与智能化。
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技资讯(2016年18期)2016-11-15
科技资讯(2016年18期)2016-11-15
价值工程(2016年29期)2016-11-14
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
企业导报(2016年6期)2016-04-21