
一种基于服务器平台的雷达解模糊工程设计方法
2016-06-30 13:09陆逸
科技视界 2016年15期
陆逸
【摘 要】针对PD雷达解模糊,给出了一种基于国产化服务器平台的解模糊设计方法。在传统解模糊算法的基础上作了一些改进,提高了算法效率。给出了解模糊模块的软件实现流程图,实际工程应用验证了算法的可行性。
【关键词】脉冲多普勒雷达;解模糊;国产服务器平台
0 引言
雷达装备作为承担重要任务的国防武器装备,其核心及重要部件国产化是大势所趋。服务器平台拥有存储内存大,计算内核多等优点,在这种平台下利用成熟的软件设计理念进行雷达软件化设计也变得方便可行。软件化雷达可以通过软件快速开发雷达系统,并灵活地实现系统资源配置、功能扩展和性能提升,以满足实际应用需求。本文重点介绍在多核多线程并行处理软件化雷达架构下解模糊模块的工程设计。
脉冲多普勒(PD)技术具有良好的杂波抑制性能,在雷达上尤其在机载雷达上得到了越来越广泛的应用。解模糊技术是PD 雷达的关键技术,采用合理而快速的算法对保证目标的检测概率和降低虚警率都有重要意义。对于中重频PD雷达,既有距离模糊又有速度模糊问题。下面本文重点阐述解距离模糊和解速度模糊的算法设计。
1 解距离模糊
1.1 基本原理
解距离模糊指雷达用多个重频探测目标,得到多个探测距离,在这些模糊距离中通过算法获取一个真实距离。假设有N种重复周期进行距离测量,它们的距离单元数分别为R1,…,Rn,目标对应的各个视在距离单元分别为r1,…,rn,。若测量没有误差, 则目标所在的真实距离单元为:
R=K1×R1+r1=…=Kn×Rn+rn(1)
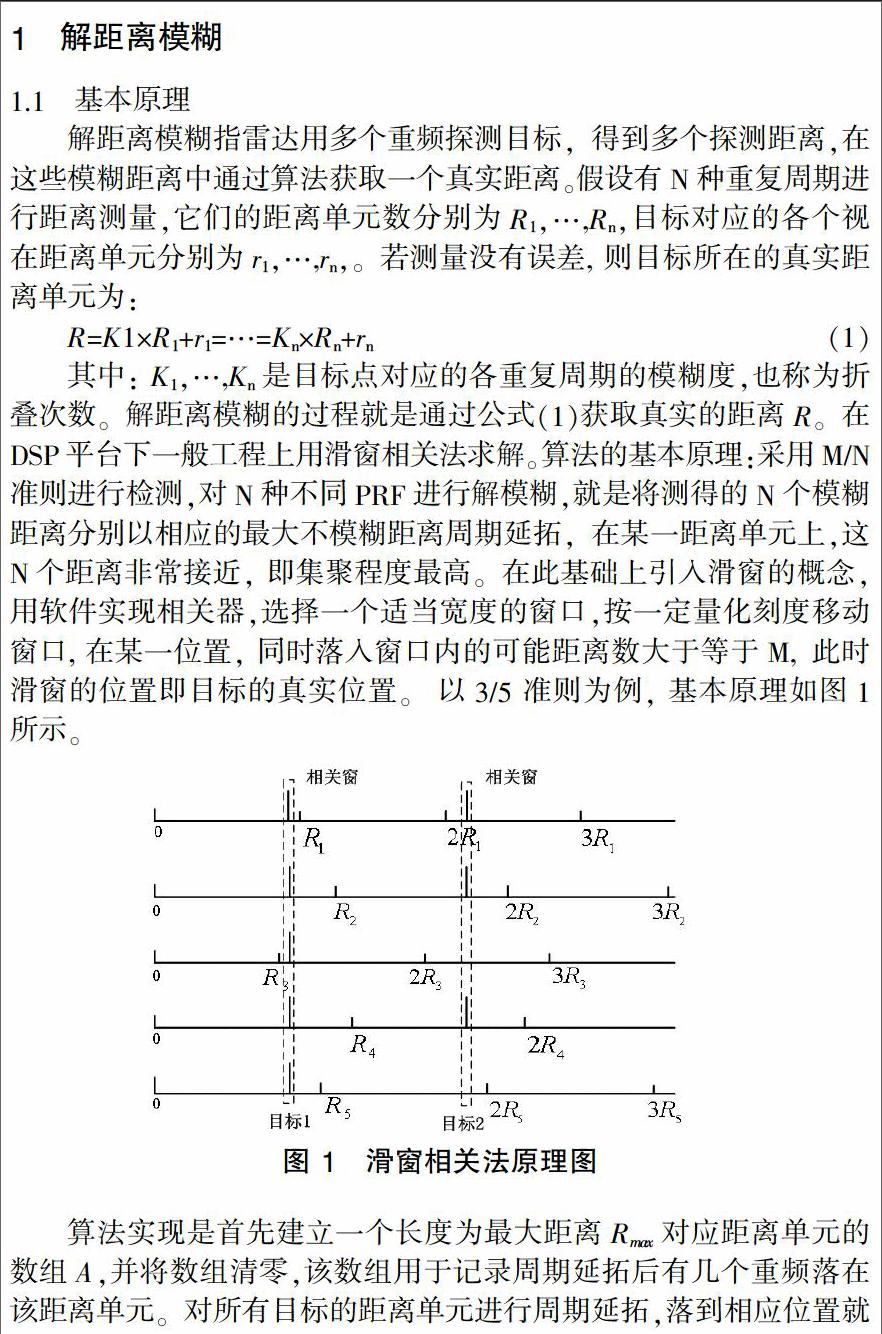
其中: K1,…,Kn是目标点对应的各重复周期的模糊度,也称为折叠次数。解距离模糊的过程就是通过公式(1)获取真实的距离R。在DSP平台下一般工程上用滑窗相关法求解。算法的基本原理:采用M/N准则进行检测,对N种不同PRF进行解模糊,就是将测得的N个模糊距离分别以相应的最大不模糊距离周期延拓,在某一距离单元上,这 N个距离非常接近, 即集聚程度最高。在此基础上引入滑窗的概念,用软件实现相关器,选择一个适当宽度的窗口,按一定量化刻度移动窗口, 在某一位置, 同时落入窗口内的可能距离数大于等于M,此时滑窗的位置即目标的真实位置。 以3/5 准则为例, 基本原理如图1 所示。
算法实现是首先建立一个长度为最大距离Rmax对应距离单元的数组A,并将数组清零,该数组用于记录周期延拓后有几个重频落在该距离单元。对所有目标的距离单元进行周期延拓,落到相应位置就将数组内计数加1,如果在N个重频中相应位置计数大于等于M则取出该距离单元作为解算结果。同时将多重频数据与下一个波位的数据进行滑窗处理。
该算法需对相关数组进行清零和滑窗位操作,且需要对每个目标进行周期扩延,当目标数量多,雷达量程大的情况下计算量较大。为减少计算量,本文提出一种求余检测法。
1.2 求余检测法
求余检测法采用与滑窗相关法相反的思维方式:将真实距离单元映射到每个重频上,然后判断该距离单元是否为过门限目标,如满足M / N的检测准则就输出当前真实距离单元。得益于服务器较大的存储内存,我们可以将信号处理CFAR的结果完整的传输到后端,在做解模糊运算时只需要移动指针就可获取某距离单元的信息,包括过门限标志。求余检测法的步骤:
(a)将第i个距离单元对折叠距离进行求余计算:
r1=mod(Ri,R1)
…(2)
rn=mod(Rn,Rn)
其中,Ri是当前遍历的距离单元,R1是第一个重频对应的折叠距离。获取距离单元号r1。Rn是第N个重频对应的折叠距离。获取距离单元号rn。
(b)将当前重频数据的初始指针加上r1,判断对应的幅度是否过门限,如是过门限数据则将计数加1,重复(a)步骤遍历N个重频。
(c)判断当前计数器是否大于等于M,如果大于等于M,则输出当前距离单元。继续回到步骤(a)遍历完所有距离单元。
2 解速度模糊
解速度模糊的原理与距离模糊类似,假设有N个重频测量速度,它们的频道数为F1,…,Fn,频道宽度分别为P1,…,Pn,目标对应的各视在频道号为f1,…,fn。目标的真实多普勒频移为:
F=K1×F1×P1+f1×P1
=…
=Kn×Fn×Pn+fn×Pn(3)
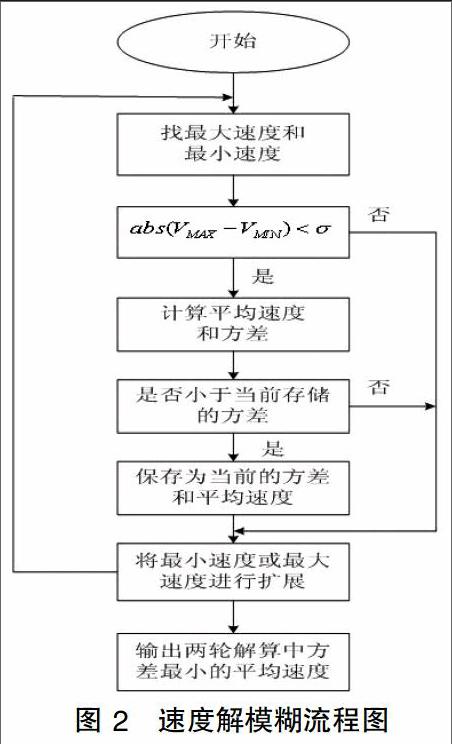
其中,K1,…,Kn,为目标点对应的各重频的模糊度。多普勒频率与速度可以通过公式相互转换。在解速度模糊之前PD雷达先进行MTD 检测,之后进行CFAR 处理,处理后得到目标点的信息,其中包括视在距离单元号和频道号,过门限标志等信息。在解模糊之前先进行频道选大,中重频率的PD雷达存在距离和速度双重模糊,解距离模糊完成后记录下速度信息, 程序便转入解速度模糊。本文采取循环扩展最小方差选取法求解真实速度,其流程图如图2所示。
首先距离解模糊后获取了参与速度解模糊的重频速度信息,找出最大速度和最小速度求其差的绝对值,如果它们的差小于误差范围则认为这组速度无模糊或者己解出速度,其中的值根据实际情况设置,本工程设置为5m/s;如果两者的差大于,就将最小速度加上其折叠速度,然后继续上述过程直到所有速度都在误差范围内则求出这组速度的平均速度和方差。这个过程为正向扩展,循环扩展速度直到速度到达雷达测量的最大正向速度,本轮解模糊结束。然后再进行反向扩展,即将最大速度减去折叠速度,直到雷达的最大负向速度为止。将两轮解速度模糊中方差最小的那组速度的平均速度作为最终解速度的结果。
3 结束语
本文针对中重频雷达距离解模糊和速度解模糊,采用了一种新的设计思路,并在国产化服务器平台上实现。服务器平台较大的运行内存和多核多线程并行处理的程序设计提供了强大的处理能力,能够满足雷达信号实时处理的应用需求。本文的设计方法改进了传统的解模糊算法,其中距离解模糊方法只与雷达处理的量程有关而与过门限的目标数量无关,提高了解算效率。经过实际工程验证,本文的设计达到了良好的解模糊效果。
【参考文献】
[1]曾涛,龙腾.一种脉冲多普勒雷达解模糊新算法[J].电子学报,2000.12:443-451.
[2]张代忠,洪一,邱炜.脉冲多普勒雷达中的解模糊算法及实现[J].雷达科学与技术,2004,10:Vol2,No5.
[3]雷火明,林强,陶雪峰,黄文韬.一种解模糊算法在地面PD体制雷达中的应用[J].空军雷达学院学报,2009.8:Vol23,No4.
[4]刘庆云,曹菲.两种解模糊方法解模糊能力比较[J].制导与引信,2012.12:Vol33, No4.
[责任编辑:王伟平]
