空间跟踪技术的发展对月球重力场模型的改进
2016-06-30 00:59李斐郝卫峰鄢建国邵先远叶茂肖驰
地球物理学报 2016年4期
关键词:内部结构
李斐, 郝卫峰, 鄢建国, 邵先远, 叶茂, 肖驰
1 武汉大学中国南极测绘研究中心, 武汉 430079 2 武汉大学测绘遥感信息工程国家重点实验室, 武汉 430079
空间跟踪技术的发展对月球重力场模型的改进
李斐1,2, 郝卫峰1, 鄢建国2, 邵先远2, 叶茂2, 肖驰1
1 武汉大学中国南极测绘研究中心, 武汉430079 2 武汉大学测绘遥感信息工程国家重点实验室, 武汉430079
摘要本文基于绕月卫星跟踪技术的三种模式,即地面跟踪模式、高低跟踪模式和低低跟踪模式,将月球重力场的发展历程分为四个阶段.分别介绍了各阶段跟踪模式的主要原理、技术特点以及所获取的具有代表性的重力场模型,并对这些模型的精度特征进行了评述.进而,通过分析不同阶段重力场模型所获取的月球重力异常特征和精度、不同阶段重力场模型的定轨精度,阐明了:空间跟踪技术的进步,极大地提高了月球重力场模型的精度,并且,有效地促进了对月球物质结构特征的认识和绕月卫星定轨的可靠性.最后对月球重力场模型中尚存在的问题以及探测技术的发展前景进行了分析和展望.
关键词月球重力场; 跟踪模式; 内部结构; 精密定轨
E-mail:fli@whu.edu.cn
1引言
月球是地球唯一的天然卫星,人类走向深空,第一步是了解月球.自1959年前苏联发射第一个月球探测器Luna 1,人类开启了与月球亲密接触的征程.如今,随着空间技术的发展,人类已经将仅对月球的运动和正面表面特征的了解,拓展到了全月面及月球内部.至今,已有六个国家和地区发射了五十多颗绕月卫星或登陆月球,在这些探测任务中,月球重力场是一个重要的探测目标.
月球重力场是月球内部质量分布的外部表征,是揭示月球内部结构与演化过程的重要信息源(李斐等, 2006).由于开展实地重力或月震测量的限制,结合重力和地形数据是目前研究月球内部结构形成与演化的主要手段.同时,月球重力场是月球探测器摄动的主要力源,精化重力场对高精度的探测器精密定轨以及飞行器着陆等具有十分重要的意义.此外,月球重力场也是决定探测器装备载荷的一个重要设计指标.
我国已成功发射了嫦娥一号、嫦娥二号绕月卫星,通过嫦娥三号实现了着陆探测,并发射嫦娥五号飞行试验器为嫦娥五号任务开展提供在轨验证.在此基础上,我国将继续开展月球着陆返回探测以及火星与小行星的探测.对月球重力场的研究将有利于充分利用我国月球探测的跟踪数据,挖掘其科学意义,同时也为我们制定具有特色的月球科学探测目标以及我国其他行星探测计划提供参考(Li et al., 2007).由于目前还未能实现有规模的登月实测,只能通过对绕月卫星的跟踪,将获取的轨道摄动量进行解算,获取重力场模型.随着跟踪技术的改进与创新,月球重力场模型的精度和分辨率在不断提高.本文针对月球重力场的探测历程,以空间跟踪技术的创新为标志,将月球重力场模型的发展划分为四个阶段,分别对四个阶段的空间跟踪技术特点以及各阶段具有代表性的重力场模型进行详细的介绍.通过对应的重力异常特征分析、精密定轨验证,阐明了技术创新对实现科学目标的重要性.最后,针对现有的月球重力场模型中存在的潜在问题以及后续月球重力场探测的技术前景进行展望.
2第一阶段-低阶重力场模型的构建(1959—1972)
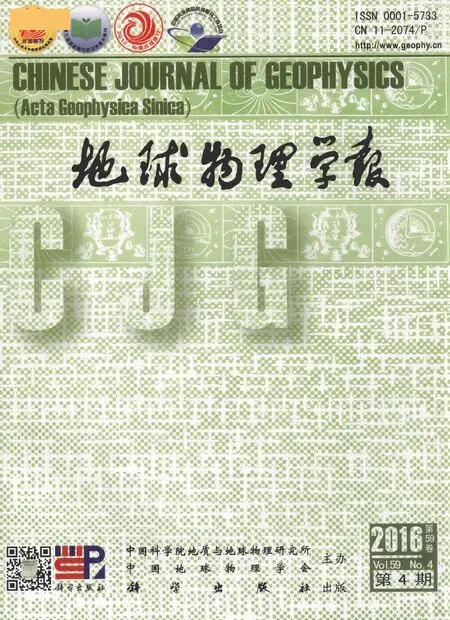
从1959年到1972年,美国和前苏联共发射了45个左右月球探测器,包括Apollo载人登月.这一时期可以认为是月球探测的第一次高潮期.这一阶段发射的探测器包括前苏联的月球号luna和Zond系列卫星及美国的Lunar Orbiter和Apollo系列子卫星.采用的空间跟踪技术为地面-卫星测量模式,即在地面跟踪站向卫星发射无线电多普勒信号,通过星上转发设备,将信号传回地面跟踪站.如果发射站和接收站为同一站,则为双程测量,两站不一致时则为三程测量.双程和三程测量数据类型包括距离和多普勒值.图1给出了这一阶段的跟踪示意图.
利用这一时期积累的卫星轨道跟踪数据,科学家开展了以低阶月球重力场为重点的研究工作.月球重力场的确定,最初的研究基于1966年前苏联发射的Luna 10航天器以及同年美国对LunarOrbiter 1进行的跟踪观测数据.到1967年8月,又跟踪了四颗不同倾角和偏心率的飞行器轨道Lunar Orbiter 2-5.这个阶段的跟踪数据类型限于多普勒频移数据,测量的是整周多普勒计数,可以转化为地面测站和绕月飞行器之间的视向相对运动速度,所跟踪的卫星多为高轨道小倾角卫星,跟踪数据覆盖范围局限在赤道两侧.由于跟踪数据本身的质量限制,卫星数目的稀少以及当时计算机处理能力的限制,这段时间国际上公布的全都是低阶次月球重力场模型.通过球谐展开方式对这些轨道的跟踪数据进行分析,Lorell和Sjogren(1968)给出了8×4模型,Liu和Laing(1971)给出了15×8模型,Michael和Blackshear(1972)给出了13×13模型.Muller和Sjogren(1968)用差分多普勒数据,给出视线方向(地面跟踪站到飞行器的连线)的加速度,并绘制出了月球近区概略重力异常图,通过对重力场的研究,一个重要的贡献在于发现了“质量瘤”的存在.70年代发射的Apollo 15、16子卫星增加了新的观测数据,综合这些数据,Bills和Ferrari(1980)给出了16×16阶次的月球重力场模型.
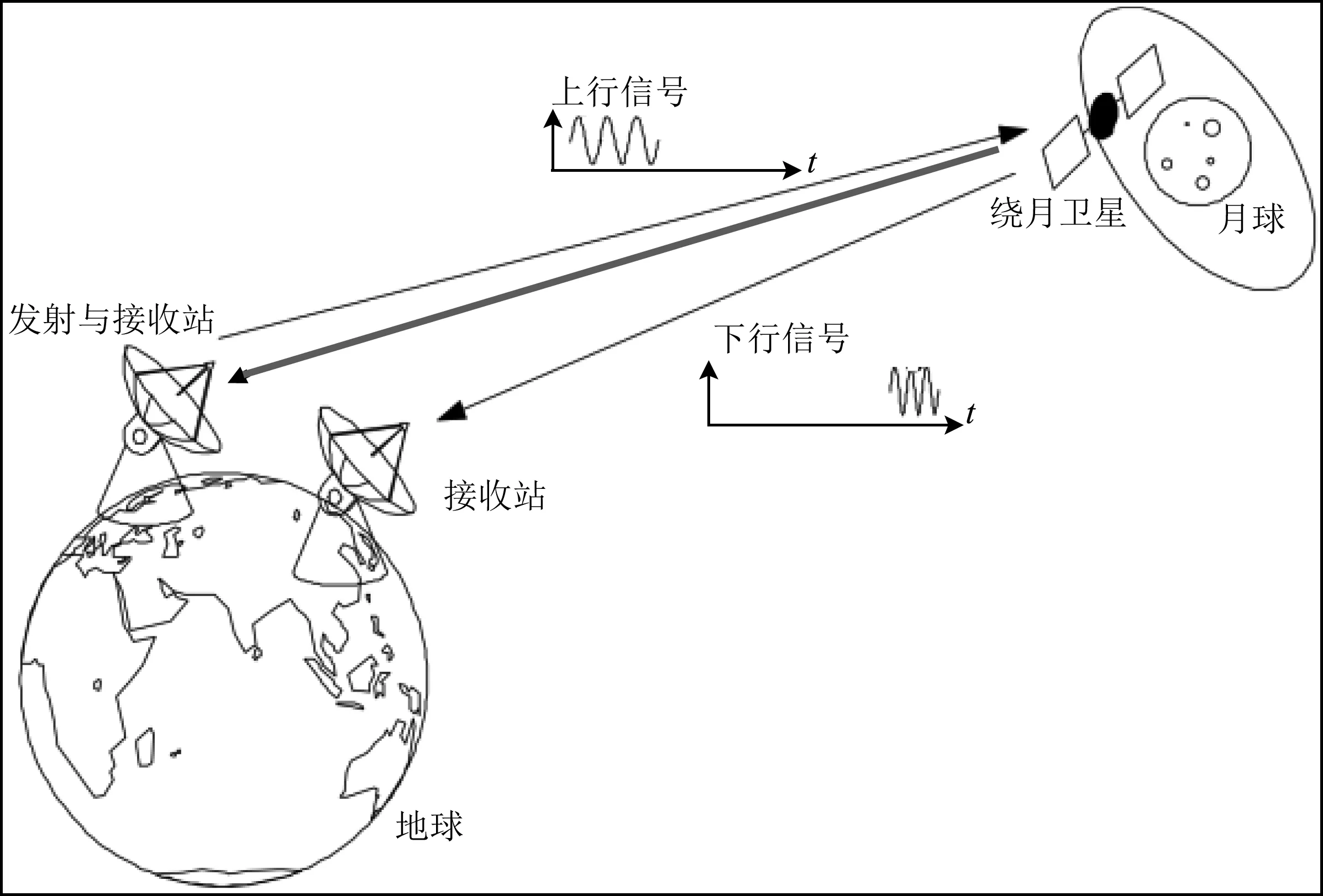
图1 月球探测第一阶段空间跟踪技术示意图Fig.1 Schematic view of the space tracking mode for the first stage
通过早期的重力场模型可以对月球内部质量分布有一个粗略的了解,“质量瘤”的存在是人类对月球认识上的一个飞跃,重力场模型结合其它的跟踪数据和样品数据也使得人类对月球的内核、天平动等物理性质有了更深刻的认识.但由于测量精度和轨道几何构型的限制,对月球重力场的了解仍存在诸多的不确定性.
3第二阶段-重力卫星的发射(1993—1998)
第一阶段发射的大量月球探测卫星,是美苏“星球大战”的产物,在其实施过程中,月球重力场不是主要的科学目标.随着冷战结束,月球探测归于停滞.直到1989年,美国宣布重返月球,并由此掀起第二次探月高潮(Bush et al., 1989).美国分别于1993年和1998年发射了Clementine和LP(Lunar Prospector)月球探测任务,将月球重力场和全球地形模型作为了主要的探测目标之一,我们将这一时期划分为月球探测的第二阶段.这一时期的跟踪手段仍采用地面跟踪站与卫星之间的双程或者三程测量,与第一阶段相比,具有更高的测量精度和更长的跟踪时段,而且,卫星的轨道高度更低,极大地丰富了摄动量的获取.
在Clementine任务发射之前,由于计算机处理能力的提高,对月球重力场模型的解算也有改进.Konopliv于1993年综合所有的历史跟踪数据(Lunar Orbiter 1-5,Apollo 15、16子卫星)求解了一个60阶次的月球重力场模型Lun60d(Konopliv et al., 1993),在定轨方面表现比较精确,这一模型为Clementine任务提供了参考模型.Clementine为一个极轨大偏心率探测器(近月点高度为400 km,远月点高度为8300 km),在跟踪数据的均匀覆盖方面有较为明显的改进.基于动力法定轨原理,Lemoine等(1997)给出了70阶次的月球重力场模型GLGM-2,它对低阶(n=2,3)和直到20阶的田谐系数较已有的模型有所改进.由于Clementine偏心率较大,跟踪数据的空间分辨率分布不均,导致在重力场模型的解算中需要引入较强的Kaula约束(1.5×10-4/n2,n为重力场阶数),因此该模型仅中低阶次系数较为可靠,高阶次则由数学约束推导而得.基于Clementine的重力场模型,Zuber等(1994)进行了初步的月球内部结构分析,研究了月球的全球均衡补偿状态.
为了获得更准确的重力场中高频信息,1998年美国又发射了一颗低高度圆形极轨道飞行器LP,LP是一颗自旋稳定的自由飞行小卫星,通常2—3个月进行一次轨道控制调整.LP探测器飞行稳定,轨道高度较低(为期12个月的正常任务阶段平均轨道高度为100 km,为期6个月的扩展任务阶段平均轨道高度为30 km),跟踪数据在月面分布较为均匀.利用LP的正常任务阶段的多普勒跟踪数据和历史跟踪数据,Konopliv和Yuan(1999)给出了100阶的重力场模型LP100J.随后,综合LP扩展任务阶段跟踪数据,Konopliv又确定了一个165阶的月球重力场模型LP165P(Konopliv et al., 1998; 鄢建国等, 2006),它直到122阶次是完全的(约15000个系数),以此作为先验信息估计到了145阶次(约6000个系数),接着又估计到了165阶(约6000个系数),每次都是以已经得到的模型作为先验信息.由于缺乏月球背面的数据,这些系数的相关性很强,因此进行局部估计比较困难.该模型直到110阶都表现出很小的噪声,但是在高阶,在位系数阶方差曲线图中表现出很明显的噪声.与LP100J(定位精度径向为2 m,其它方向为20 m)相比,该模型能更好地用于飞行器的定轨.基于同样的数据,利用更好的计算设备,Konopliv等(2001)解算了150阶次的模型LP150Q,解算一次完成,没有对位系数进行截断.LP提供的轨道跟踪数据极大程度地改进了对月球重力场的认识,对月球重力场的精化起到了重要的作用.当时认为,仅依靠地面跟踪模式,LP系列重力场模型已经是最佳的模型.在我国嫦娥卫星发射之初,LP系列亦为当时最好的月球重力场参考模型,同时也是了解月球内核和月壳结构的重要数据源(柯宝贵等, 2009; 李斐等, 2009).
4第三阶段-远月面重力场特征获取(2007)
尽管月球重力场模型的阶次不断提高,其精度和定轨能力也都有显著的改善,在月球地质构造与内部物理的研究中发挥的作用越来越大.但是,一个显然的问题是:地面跟踪模式下,由于所有的跟踪数据仅限于月球正面,进行全球重力场模型解算时只能利用Kaula约束,由此得到的月球重力场模型并不能完全客观准确地描述月球全球性的质量分布规律和重力场特性.针对这一缺陷,日本设计了一种新的跟踪模式,这一跟踪模式借鉴了地球重力场探测中的卫-卫跟踪模式.2007年,日本发射了SELENE月球探测器,以高低卫星跟踪卫星的方式实现月球的全球观测(Kikuchi,2006).以SELENE为标志,可以认为是月球重力场探测的第三阶段.这一探测任务的创新在于采用了高低跟踪的四程多普勒模式以实现月球背面的直接测量,并同时首次采用了同波束干涉测量技术(VLBI)(Kikuchi, 2006; 平劲松等, 2001).
图2给出了这一空间跟踪技术的示意图,即通过在高轨运行的卫星Rstar中继星(极轨道,100 km×2400 km)跟踪测量低轨主卫星Orbiter(轨道为100 km高度的圆极轨道).主卫星Orbiter在月球正面运行时,通过地面测站和主卫星的常规双程测距测速模式进行跟踪测量.当主卫星运行到月球背面时,通过地面测站(仅Usuda深空跟踪站)、中继卫星Rstar和主卫星四程多普勒链路测量的模式,实现背面的轨道跟踪测量.由于四程多普勒测量模式中仅有一个深空站参与跟踪测量,观测时段中有限的跟踪数据难以保证中继星和主卫星的定位精度,从而无法实现对背面重力场的精确探测.为了提高中继星的定轨精度,这一任务又增加了一颗VLBI星(Vstar,极轨道,100 km×800 km),Vstar与中继卫星Rstar通过同波束测量模式进行高精度相对定位测量,通过消除两颗卫星在传播路径上由介质影响造成的系统误差以及测站接收系统的误差,以提高Rstar的定轨精度,进而保证四程多普勒测量的准确性.
SELENE在轨运行期间,正常任务阶段持续的时间长约一年,利用前3个月的数据,Namiki等(2009)发表了90阶次的重力场模型SGM90d.这一模型首次利用了月球背面的直接跟踪数据,因此,SGM90d相比于LP100K模型精度有显著的提高,LP100K定轨残差均方根误差为15 mm·s-1左右,而SGM90d的定轨残差均方根误差则为1 mm·s-1.此外,这一模型首次揭示了月球背面的大尺度重力场特征,并发现了撞击坑盆地处出现的正负交替的环状的重力异常特征,这一特征在之前的重力场模型中均被误差掩盖.综合正常任务阶段完整的四程多普勒测量数据,Matsumoto等(2010)给出了100阶次的重力场模型SGM100h.相比于SGM90d,这一模型给出了更为精细的背面重力场特征,发现了多个新的撞击坑盆地(Matsumoto et al., 2010).
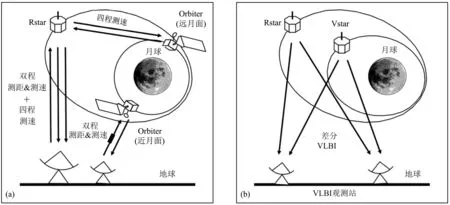
图2 SELENE高低跟踪测量(左)和同波束测量(右)Fig.2 SELENE high-low measurement (left) and same beam measurement (right)
与SELENE同一阶段发射的月球探测任务还有中国的嫦娥一号(2007)、印度的月船一号(2008)以及美国的LRO(Lunar Reconnaissance Orbiter, 2009),月船一号以月球元素探测为主,LRO则主要是获取月面精细地形模型,对重力场没有明显贡献.嫦娥一号在轨运行一年,在此期间积累了大量的轨道跟踪数据(双程测距和测速),这些数据同样包含了丰富的重力场信息,尤其是低频重力场数据(Yan et al., 2010;).综合SELENE和嫦娥一号轨道跟踪数据,以及历史探测数据,鄢建国等(2012)发表了100阶次的模型CEGM02.相比于SGM100h,CEGM02模型在中低阶项具有较为显著的改进.综合SGM100h和CEGM02模型解算得到的月球拉夫数k2,Harada认为下月幔存在粘滞度较低的熔融层(Harada et al., 2014).
5第四阶段-高精度高分辨率全月球重力场模型的构建(2012—2014)
通过SELENE高低跟踪模式,月球背面的重力场信息被首次纳入到重力场模型的解算之中,从而大大提高了月球重力场模型的精度与可靠性.然而,美中不足的是,由于SELENE运行过程中四程多普勒跟踪数据量有限(仅Usuda测站参与观测,每天观测时段不到1 h),并且跟踪数据主要分布于南半球,导致SELENE任务对月球背面重力场的精度和分辨率改进有限,因此,由SELENE任务解算的重力场模型,有效阶次仅为70阶次.针对这一状况,美国于2011年9月发射了GRAIL(Gravity Recovery and Interior Laboratory)探测卫星.该计划采用了另一种精度更高的卫-卫跟踪模式,即低轨卫星跟踪低轨卫星,这一模式类似于地球上的GRACE重力卫星,被认为是获取卫星轨道摄动量的最佳模式.GRAIL任务的实施可以认为是月球重力场探测的第四个阶段.
GRAIL任务获取了全月球均匀分布的星间Ka波段测量数据(相对于原先的地面测站与卫星的S波段测量,测量精度提高了近4个量级,达0.5 μm·s-1的水平),高精度星间测速有利于探测月球质量异常.GRAIL任务中两颗卫星轨道均为圆极轨道,在轨任务阶段平均轨道高度为50 km,扩展任务阶段平均轨道高度为30 km.GRAIL卫星跟踪原理由图3所示.这一任务通过地面测站与卫星的S波段跟踪测量,进行卫星的精密定轨,全球分布的星间Ka波段测速测量用于解算高精度高阶次的月球重力场模型,星间S波段的测量则用于两颗卫星之间的时间同步.相比于采用高低跟踪模式的SELENE任务,GRAIL提供了类型更丰富、精度更高、分布更为均匀的跟踪数据.
图3 GRAIL跟踪测量示意图Fig.3 Schematic view of GRAIL′s tracking mode
利用GRAIL正常任务阶段三个月的测量数据,Zuber等(2013)发表了高达420阶次的月球重力场模型GL0420A.这一模型首次给出了全球均匀分布的高精度重力场信息,给出了月球背面更为精细的重力场特征,包括大量小尺度的撞击坑和盆地.利用这一模型,Wizoreck等(2013)重新估算了月壳厚度和密度,发现月壳平均厚度要小于之前的估计,仅为35 km左右.根据GRAIL正常任务阶段前3个月的星间跟踪数据,JPL和Goddard分别解算了660阶次的模型GL0660B(Konopliv et al., 2013)和GRGM660PRIM(Lemoine et al.,2013),与GL0420A相比,模型在高阶次的精度得到了进一步改进,重力地形相关性系数也有明显提高.综合正常任务阶段3个月和扩展段段3个月的跟踪数据,JPL和Goddard进一步解算了900阶次重力场模型GL0900D(Konopliv et al.,2014)和GRGM900C(Lemoine et al.,2014).与600阶次模型相比,900阶次模型在高阶项精度有进一步改进,空间分辨率达6 km,与地形的相关性直至700阶次仍接近1.表1针对不同阶段不同跟踪模式得到的重力场模型进行了总结.

表1 不同阶段典型跟踪手段与代表性重力场模型
6不同阶段重力场模型对月球重力异常特征认识的促进
跟踪技术的发展不断改善着月球重力场模型的精度与分辨率,进而促进了对月球重力异常特征认识的不断深化.本文选择上述不同阶段获得的四个典型重力场模型:Sagitov16×16模型,LP100K,SGM100h,GRGM660PRIM,分别解算了月球自由空气重力异常,并分析了对应的重力场特征.
图4为上述4个典型重力场模型得到的全月球自由空气重力异常分布图.可以看出,由于早期跟踪数据的分布、精度和计算机处理能力的限制,解算的月球重力场模型精度和阶次较低,如Sagitov16×16模型,虽然能够发现正面典型的质量瘤,但噪声比较大,背面明显出现2个明显的噪声点.
LP任务提供了大量高精度低轨道跟踪数据,使得月球重力场的解算阶次得到较大提升,图4中LP100K模型得到的重力异常图使得近月面的质量瘤清晰可见,但由于缺少月球背面跟踪数据,LP100K解算的月球背面的重力异常出现明显的条纹误差.
利用SELENE跟踪数据解算的SGM100h模型,对月球背面大尺度重力异常分布情况反映更为清晰,并发现了新的重力异常特征.正面的典型质量瘤区域为负的重力异常包围着正的重力异常,在月球背面的典型区域,比如克罗列夫坑Korolev(4.5°S,157°W),显现出重力异常的环状包围形式,即在中心区域为负的重力异常,由正的重力异常区包围,在外层又由负的重力异常区包围,正负重力异常区交错出现.
而由最新月球探测计划GRAIL卫星获得的GRGM660PRIM重力场模型,得到的自由空气重力异常相对于之前的结果展现出更加清晰的细节,没有SGM100h中由于跟踪数据的限制出现的条带误差,同时发现了新的撞击盆地细节,并体现了月球重力和地形的强相关性.
7不同阶段重力场模型对绕月卫星定轨精度的改进
除了重力异常特征之外,对卫星的精密定轨也可以用于评价重力场模型精度,以衡量不同阶段跟踪模式下得到的重力场模型的可靠性.Mazarico等(2013)曾利用不同模型对LP、SELENE和LRO等圆极轨探测器进行了精密定轨仿真计算.本文则对早期的Apollo 15任务的子卫星进行精密定轨以评价不同模型的精度水平.Apollo 15号子卫星为Apollo 15号登月任务成功实施后发射的一颗绕月卫星,该卫星通过卫星激光测距进行了月面地形测量.与LP、SELENE和LRO等探测器不同,Apollo 15号子卫星为一大偏心率轨道,倾角大约为35°.在对Apollo 15号子卫星的精密定轨中,估计参数包括6个轨道根数、光压系数以及测量系统偏差,采用的重力场模型分别为Sagitov 16×16,LP100K,SGM100h以及GRGM660PM.测量数据包括双程和三程多普勒测速.图5给出了利用不同模型得到的测速残差,表2给出了各残差的统计信息.
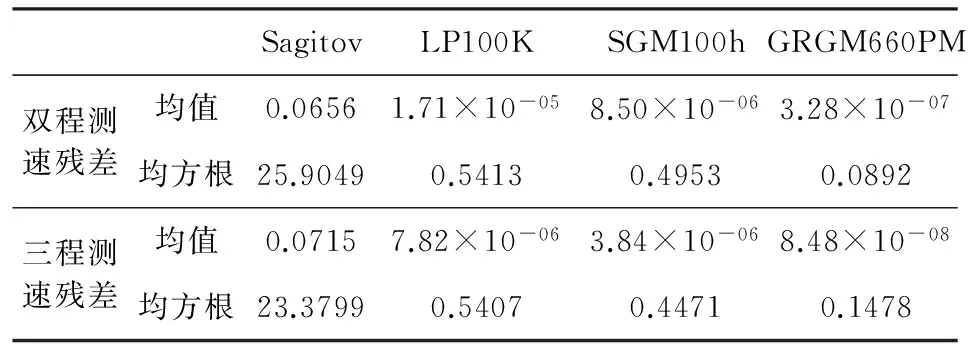
表2 不同模型精密定轨残差统计信息 (单位:mm·s-1)
从图5中可以看出,早期的Sagitov 16×16阶次模型给出的精密定轨结果较差,一方面是由于其解算阶次较低,模型仅能反映月球重力场长波段信息,不利于卫星在低轨道处的精密定轨;另一方面则是Sagitov 16×16阶次模型解算时没有采用Apollo 15号子卫星的跟踪数据.LP100K和SGM100h具有相近的定轨结果,这主要是因为两个模型在解算过程中均包含了该卫星的跟踪数据.这两个模型的残差中对应大的跳变,主要是因为卫星的轨道较低,解算模型的阶次不足以吸收该轨道处包含的重力场信息.利用GRGM660PM模型解算时没有出现这一跳变现象,主要是因为模型的阶次较高,能够适用于较低轨道处的精密定轨.此外,利用GRAIL模型处理倾角卫星,可以发现仍然具有很好的结果.这与之前的倾角卫星精密定轨仿真结果有所出入(李斐等, 2011),在该研究中认为,通过极轨卫星跟踪数据解算得到的月球重力场模型,无法对极轨之外的倾角卫星进行较好的精密定轨,也从侧面证实了GRAIL星间跟踪数据对月球重力场模型精度的显著改进.

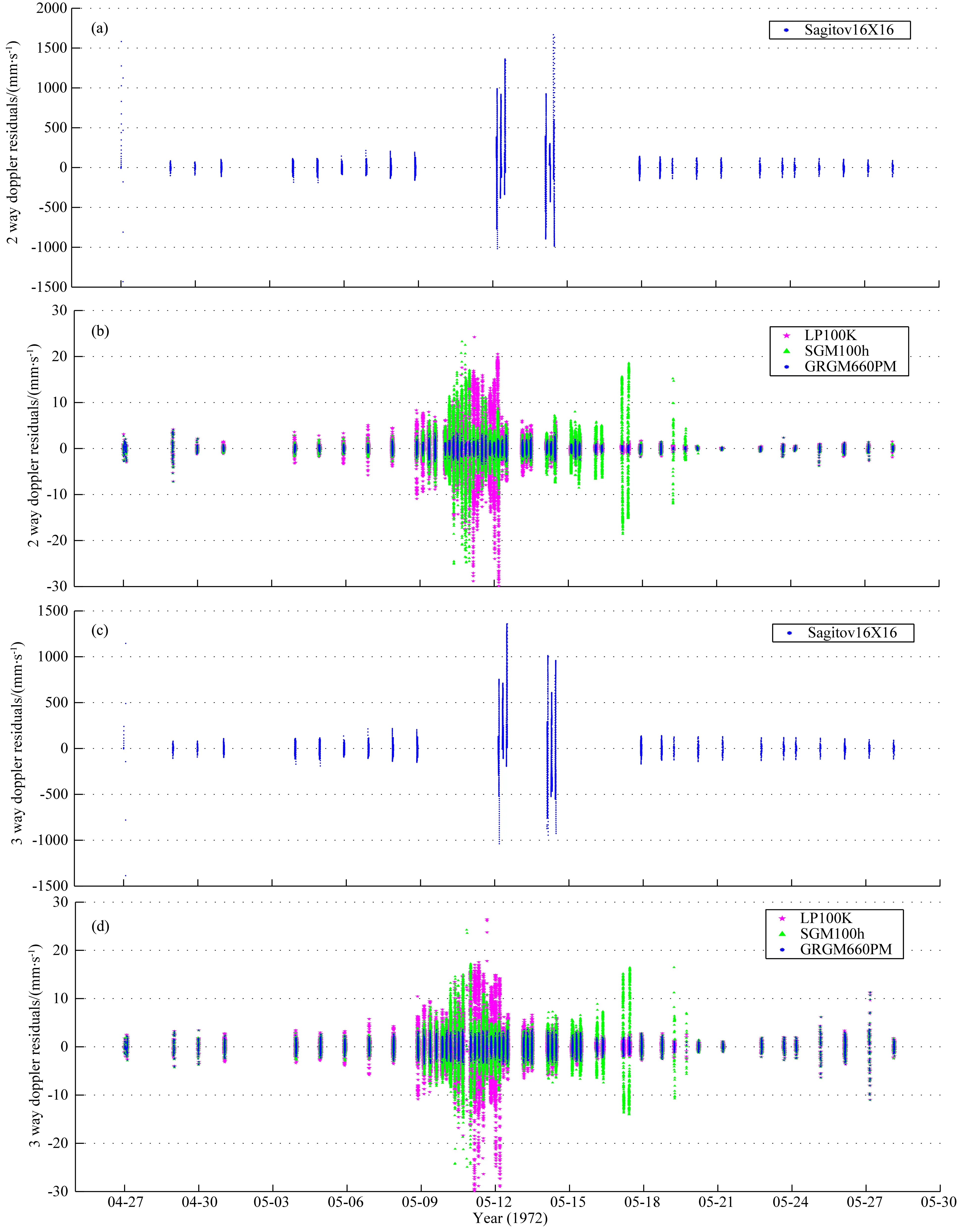
图5 不同模型精密定轨结果差异(a) Sagitov模型双程测速数据残差; (b) LP100K、SGM100h和GRGM660PM双程测速残差; (c) Sagitov 模型三程测速数据残差; (d) LP100K、SGM100h和GRGM660PM三程测速残差.Fig.5 Precise orbit determination residuals from different models(a) Two-way range rate residuals from Sagitov; (b) Two-way range rate residuals from LP100K、SGM100hand GRGM660PM; (c) Three-way range rate residuals from Sagitov. d:three-way range rate residuals from LP100K、SGM100hand GRGM660PM.
8结论与展望
从确定月球重力场的历程可以看出,每一阶段月球重力场模型的改进都源于跟踪技术的创新,而这种创新实质上又是对地球重力场卫星探测技术的有效借鉴,如高-低跟踪、低-低跟踪技术等.由于月球外部没有大气,采用与地球卫星类似的跟踪方法,效果应该更加有效.一般认为,通过卫-卫跟踪模式获得的月球重力场模型的精度与分辨率已足够高,要获取更高精度的月球重力场模型,我们认为还有以下几个发展方向:
第一,月球重力场模型低阶次仍有待改进.图6为新近探测计划获取的重力场模型的功率谱及其差值,其中图b为图a在前100阶的放大图,通过给出的功率谱差值比较,可以看出GRAIL任务对低阶项的改进的局限性.GRGM0660PM模型给出的二阶项系数C20的阶方差为0.15×10-09,其900阶次的模型给出的C20阶方差则为0.26×10-9,与之前利用SELENE和嫦娥一号跟踪数据解算得到的CEGM02(C20阶方差为0.80×10-9)相比较,改进仍然不显著,相对于高阶项精度改进达4个量级而言,对二阶项的改进仅有2倍多.可以认为,如果进一步融合GRAIL和SELENE及其他历史探测器数据,尤其是中国的嫦娥一号(轨道高度为200 km)探测器数据,有望进一步提高低阶项的位系数精度.
第二,美国的LRO卫星通过激光测高仪和照相机(窄角相机和广角相机)已获得了目前精度和分辨率最高的地形数据.LRO获取的地形的分辨率高于GRAIL重力场模型的分辨率(Konopliv et al., 2014),通过对地形数据产生的高频重力场效应的分析,一方面可用于对现有的重力场模型进行检验,同时也可用于对现有月球重力场模型高频部分的改进.

图6 不同重力场模型功率谱及其差值Fig.6 Power spectra and its difference from different gravity models
第三,进一步提高月球重力场模型的精度,要突破仅依赖于跟踪技术的重力场信息获取模式,在直接观测方式上予以创新,如携带加速度计的重力卫星、类似于地球重力场观测的GOCE卫星的月球重力场梯度观测卫星等.
此外,当前月球重力场研究最显著的问题,主要是缺乏足够的月面实测点进行模型验证.现有的四个Apollo重力测量点,均分布在月海区域,并且测量点位和测量精度的不确定性较大.未来的月球探测任务中,可以考虑在南极(郝卫峰等,2012)或者高地区域布设重力测量点,以扩大空间分布范围,从根本上提高月球重力场模型的精度与可靠性.
致谢本文所用到的月球重力场模型取自美国NASA PDS Geoscience Node Data中心和日本JAXA Data Archive中心.部分计算使用了SHTOOLS工具,球面投影图绘制采用了The Generic Mapping Tools(GMT)软件.感谢审稿专家提出的宝贵意见.
References
Bills B G, Ferrari A J. 1980. A harmonic analysis of lunar gravity.JournalofGeophysicalResearch, 85(B2): 1013-1025, doi: 10.1029/JB085iB02p01013.
Bush G H W. 1989. Remarks on the 20th anniversary of the apollo 11 moon landing. http:∥www.presidency.ucsb.edu/ws/index.php?pid=17321.
Hao W F, Li F, Yan J G, et al. 2012. Lunar polar illumination based on Chang′E-1 laser altimeter.ChineseJournalofGeophysics(in Chinese), 55(1): 46-52, doi: 10.6038/j.issn.0001-5733.2012.01.005.
Harada Y, Goossens G, Matsumoto K, et al. 2014. Strong tidal heating in an ultralow-viscosity zone at the core-mantle boundary of the Moon.NatureGeoscience, 7(8): 569-572, doi: 10.1038/ngeo2211.
Ke B G, Li F, Wang W R, et al. 2009. Analysis of the lower mantle thickness and core size of lunar based on the solution of the Lane-Emden equation.ChineseJournalofGeophysics(in Chinese), 52(5): 1208-1213, doi: 10.3969/j.issn.0001-5733.2009.05.009.
Kikuchi F. 2006. Differential phase delay estimation by same beam VLBI method [Ph. D. thesis]. Kanagawa, Japan: The Graduate University for Advanced Studies.
Konopliv A S, Sjogren W L, Wimberly R N, et al. 1993. A high resolution lunar gravity field and predicted orbit behavior.∥AAS/AIAA Astrodynamics Specialist Conference. Victoria, B. C.: AIAA, 93-622.
Konopliv A S, Yuan D N. 1999. Lunar prospector 100th degree gravity model development.∥Proceedings of the 30th Annual Lunar and Planetary Science Conference. Houston, TX: Lunar and Planetary Institutes.
Konopliv A S, Binder A B, Hood L L, et al. 1998. Improved gravity field of the Moon from Lunar Prospector.Science, 281(5382): 1476-1480, doi: 10.1126/science.281.5382.1476.
Konopliv A S, Asmar S W, Carranza E, et al. 2001. Recent gravity models as a result of the Lunar prospect mission.Icarus, 150(1): 1-18, doi: 10.1006/icar.2000.6573.
Konopliv A S, Park R S, Yuan D N, et al. 2013. The JPL lunar gravity field to spherical harmonic degree 660 from the GRAIL primary mission.JournalofGeophysicalResearch:Planets, 118(7): 1415-1434, doi: 10.1002/jgre.20097.
Konopliv A S, Park R S, Yuan D N, et al. 2014. High-resolution lunar gravity fields from the GRAIL primary and extended missions.GeophysicalResearchLetters, 41(5): 1452-1458, doi: 10.1002/2013GL059066.
Lemoine F G, Goossens S, Sabaka T J, et al. 2013. High-degree gravity models from GRAIL primary mission data.JournalofGeophysicalResearch:Planets, 118(8): 1676-1698, doi: 10.1002/jgre.20118.
Lemoine F G, Goossens S, Sabaka T J, et al. 2014. GRGM900C: A degree 900 lunar gravity model from GRAIL primary and extended mission data.GeophysicalResearchLetters, 41(10): 3382-3389, doi: 10.1002/2014GL060027.
Lemoine F G R, Smith D E, Zuber M T, et al. 1997. A 70th degree lunar gravity model (GLGM-2) from Clementine and other tracking data.JournalofGeophysicalResearch, 102(E7): 16339-16359, doi: 10.1029/97JE01418.
Li F, Yan J G,Ping J S. 2006. Lunar exploration and lunar gravity field determination.ProgressinGeophysics(in Chinese), 21(1): 31-37, doi: 10.3969/j.issn.1004-2903.2006.01.006. Li F, Yan J G. 2007. Principle and method of lunar gravity field determination and project on self-determinational lunar gravity Field.GeomaticsandInformationScienceofWuhanUniversity(in Chinese), 32(1): 6-10, doi: 10.3321/j.issn.1671-8860.2007.01.002.
Li F, Ke B G, Wang W R, et al. 2009. Estimation of the ancient lunar crust thickness from the admittance.ChineseJournalofGeophysics(in Chinese), 52(8): 2001-2007, doi: 10.3969/j.issn.0001-5733.2009.08.007.
Li F, Yan J G, Ping J S, et al. 2011. Lunar gravity field simulation based on big inclination orbiter.ChineseJournalofGeophysics(in Chinese), 54(3): 666-672, doi: 10.3969/j.issn.0001-5733.2011.03.005.
Liu A S, Laing P A. 1971. Lunar gravity analysis from long-term effect.Science, 173(4001): 1017-1020, doi: 10.1126/science.173.4001.1017.
Lorell J, Sjogren W L. 1968. Lunar gravity: Preliminary estimates from lunar orbiter.Science, 159(3815): 625-627, doi: 10.1126/science.159.3815.625.
Matsumoto K, Goossens S, Ishihara Y, et al. 2010. An improved lunar gravity field model from SELENE and historical tracking data: Revealing the farside gravity features.JournalofGeophysicalResearch, 115(E6): E06007, doi: 10.1029/2009JE003499.Mazarico E, Lemoine F G, Goossens S J, et al. 2013. Improved precision orbit determination of lunar orbiters from the GRAIL-derived lunar gravity models.∥Proceedings of 23rd AAS/AIAA Space Flight Mechanics Conference. Kauai, Hawaii: AIAA, 13-274.
Michael Jr W H, Blackshear W T. 1972. Recent results on the mass, gravitational field and moments of inertia of the moon.TheMoon, 3(4): 388-402, doi: 10.1007/BF00562460. Muller P M, Sjogren W L. 1968. Mascons: Lunar mass concentrations.Science, 161(3842): 680-684, doi: 10.1126/science.161.3842.680.Namiki N, Iwata T, Matsumoto K, et al. 2009. Farside gravity field of the moon from four-way Doppler measurements of SELENE (Kaguya).Science, 323(5916): 900-905, doi: 10.1126/science.1168029.
Ping J S, Kono Y, Kawano N, et al. 2001. SELENE mission: Mathematical model for SST Dopler measurements.ProgressinAstronomy(in Chinese), 19(3): 354-364.
Wieczorek M A, Neumann G A, Nimmo F, et al. 2013. The crust of the moon as seen by GRAIL.Science, 339(6120): 671-675, doi: 10.1126/science.1231530.
Yan J G, Ping J S, Li F, et al. 2006. Character analysis of the lunar gravity field by the LP165P model and its effect on lunar satellite orbit.ChineseJournalofGeophysics(in Chinese), 49(2): 408-414, doi: 10.3321/j.issn:0001-5733.2006.02.014.
Yan J G, Li F, Ping J S, et al. 2010. Lunar gravity field model CEGM-01 based on tracking data of Chang′E-1.ChineseJournalofGeophysics(in Chinese), 53(12): 2843-2851, doi: 10.3969/j.issn.0001-5733.2010.12.007.
Yan J G, Ping J S, Li F, et al. 2010. Chang′E-1 precision orbit determination and lunar gravity field solution.AdvancesinSpaceResearch, 46(1): 50-57, doi: 10.1016/j.asr.2010.03.002.
Yan J G, Goossens S, Matsumoto K, et al. 2012. CEGM02: An improved lunar gravity model using Chang‘E-1 orbital tracking data.PlanetaryandSpaceScience, 62(1): 1-9, doi: 10.1016/
j.pss.2011.11.010.
Zuber M T, Smith D E, Lemoine F G, et al. 1994. The shape and internal structure of the moon from the Clementine mission.Science, 266(5192): 1839-1843, doi: 10.1126/science.266.5192.1839.
Zuber M T, Smith D E, Watkins M M, et al. 2013. Gravity field of the moon from the gravity recovery and interior laboratory (GRAIL) mission.Science,339(6120): 668-671, doi: 10.1126/science.1231507.
附中文参考文献
郝卫峰, 李斐, 鄢建国等. 2012. 基于“嫦娥一号”激光测高数据的月球极区光照条件研究. 地球物理学报, 55(1): 46-52, doi: 10.6038/j.issn.0001-5733.2012.01.005.
柯宝贵, 李斐, 王文睿等. 2009. 应用Lane-Emden方程分析下月幔厚度与月核半径大小. 地球物理学报, 52(5): 1208-1213, doi: 10.3969/j.issn.0001-5733.2009.05.009.
李斐, 鄢建国, 平劲松. 2006. 月球探测及月球重力场的确定. 地球物理学进展, 21(1): 31-37, doi: 10.3969/j.issn.1004-2903.2006.01.006.
李斐, 鄢建国. 2007. 月球重力场的确定及构建我国自主月球重力场模型的方案研究. 武汉大学学报(信息科学版), 32(1): 6-10, doi: 10.3321/j.issn.1671-8860.2007.01.002.
李斐, 柯宝贵, 王文睿等. 2009. 利用重力地形导纳估计月壳厚度. 地球物理学报, 52(8): 2001-2007, doi: 10.3969/j.issn.0001-5733.2009.08.007.
李斐, 鄢建国, 平劲松等. 2011. 基于大倾角卫星轨道跟踪数据的月球重力场模型仿真解算. 地球物理学报, 54(3): 666-672, doi: 10.3969/j.issn.0001-5733.2011.03.005.
平劲松, 河野裕介, 河野宣之等. 2001. 日本SELENE月球探测计划和卫星间多普勒跟踪的数学模型. 天文学进展, 19(3): 354-364.
鄢建国, 平劲松, 李斐等. 2006. 应用LP165P模型分析月球重力场特征及其对绕月卫星轨道的影响. 地球物理学报, 49(2): 408-414, doi: 10.3321/j.issn:0001-5733.2006.02.014.
鄢建国, 李斐, 平劲松等. 2010. 基于“嫦娥一号”跟踪数据的月球重力场模型CEGM-01. 地球物理学报, 53(12): 2843-2851, doi: 10.3969/j.issn.0001-5733.2010.12.007.
(本文编辑刘少华)
Advancement of lunar gravity model due to the development of space tracking techniques
LI Fei1,2, HAO Wei-Feng1, YAN Jian-Guo2, SHAO Xian-Yuan2, YE Mao2, XIAO Chi1
1ChineseAntarcticCenterofSurveyingandMapping,WuhanUniversity,Wuhan430079,China2StateKeyLaboratoryofInformationEngineeringinSurveying,MappingandRemoteSensing,WuhanUniversity,Wuhan430079,China
AbstractBased on the three modes of lunar spacecraft tracking techniques: Earth-based tracking mode, high-low satellite-to-satellite tracking mode and low-low satellite-to-satellite tracking mode, the development of lunar gravity models could be divided into 4 stages. First, we introduce the principle, technical characteristics of the different tracking modes, and the representative gravity models, and then make comments to these models′ precision. Further, through comparison of gravity anomaly precision, characteristics and orbit determination precision from different stages′ lunar gravity field models, we conclude that: the advancement of space tracking techniques has significantly improved the precision of lunar gravity model and effectively promote the understanding of lunar interior structure and there liability of lunar satellite orbit determination. Finally, we analyze the deficiency of current lunar gravity models and give a perspective of future space tracking techniques.
KeywordsLunar gravity model; Tracking mode; Lunar interior structure; Precise orbit determination
基金项目国家自然科学基金(41174019,41374024),湖北省自然科学基金重点项目创新群体类(2015CFA011),武汉大学中央高校基本科研业务费专项资金(2042014kf0051)资助.
作者简介李斐,男,1960年生,教授,博士生导师,《地球物理学报》编委,主要从事物理大地测量及地球物理的研究与教学工作.
doi:10.6038/cjg20160407 中图分类号P184
收稿日期2015-10-11,2015-12-29收修定稿
李斐, 郝卫峰, 鄢建国等. 2016. 空间跟踪技术的发展对月球重力场模型的改进. 地球物理学报,59(4):1249-1259,doi:10.6038/cjg20160407.
Li F, Hao W F, Yan J G, et al. 2016. Advancement of lunar gravity model due to the development of space tracking techniques.ChineseJ.Geophys. (in Chinese),59(4):1249-1259,doi:10.6038/cjg20160407.
猜你喜欢
舰船科学技术(2021年12期)2021-03-29
中华建设(2019年3期)2019-07-24
科学与财富(2017年12期)2017-05-16
中南大学学报(自然科学版)(2016年2期)2017-01-19
出版与印刷(2016年3期)2016-08-15
上海金属(2015年3期)2015-11-29
电源技术(2015年9期)2015-06-05
汽车科技(2015年1期)2015-02-28
中国塑料(2014年12期)2014-10-17
断块油气田(2012年6期)2012-03-25