
基于改进TTR算法的车辆侧翻预警研究
2016-06-27 04:22褚端峰邓泽健吴超仲
中国机械工程 2016年11期
褚端峰 崔 剑 邓泽健 田 飞 吴超仲
1.武汉理工大学,武汉,4300632.水路公路交通安全控制与装备教育部工程研究中心,武汉,430063
基于改进TTR算法的车辆侧翻预警研究
褚端峰1,2崔剑1,2邓泽健1,2田飞1,2吴超仲1,2
1.武汉理工大学,武汉,4300632.水路公路交通安全控制与装备教育部工程研究中心,武汉,430063
摘要:侧翻时限(TTR)能有效用于车辆侧翻预警,然而传统的TTR方法所选定的侧翻阈值因行车条件的改变难以精确设定,会导致预警提前或滞后等问题。为了弥补传统TTR算法的不足,提高车辆侧翻预警的有效性,建立了三自由度车辆动力学模型;提出了以车辆的当前侧向加速度与实时侧向极限加速度的比值这一相对量作为侧翻评价指标,替代传统依靠侧倾角或侧向加速度等绝对量来进行侧翻预测;根据当前车辆运动状态计算未来发生侧翻时的TTR值,从而得到改进TTR侧翻预警算法。结果表明:改进TTR侧翻预警算法较传统基于侧倾角或侧向加速度的这两种TTR侧翻预警算法,能更准确地发现侧翻危险。
关键词:侧翻预警;改进侧翻时限;车辆动力学;侧向极限加速度
0引言
车辆侧翻主要由一些特殊的行驶工况直接或间接引起,如紧急转弯、一侧轮胎突然遭遇不平的路面等。根据侧翻事故致因,一般将其划分为两类:一类为绊倒侧翻;另一类为非绊倒侧翻,即曲线行驶引起的侧翻。绊倒侧翻主要由于车辆在行驶过程中,一侧轮胎撞击到地面突起物,或遭遇地面凹陷,致使左右失衡而侧翻。非绊倒侧翻则主要由于车辆急转弯或换道时侧向加速度过大,使得轮胎垂向力不足以平衡作用在重心的离心力所致。对于绊倒侧翻,驾驶员能够进行比较直观的把握,通过对车辆运动姿态进行合理调整得以避免。急转弯引起的非绊倒侧翻要比绊倒侧翻更危险,这是因为非绊倒侧翻不仅与路面等外界环境相关,而且驾驶员往往难以提前察觉侧翻危险,容易在此类危险即将发生时进行错误的驾驶操作[1]。因此,非绊倒侧翻作为研究热点,更加引起关注。
相比乘用车而言,重型车辆、运动型多功能车辆(SUV)等因重心较高,更易发生侧翻事故[2]。侧翻事故一般发生在路面附着条件较好、车速较高的情况下,驾驶员较难依靠自身的判断予以避免。因而侧翻事故预防,主要是通过车辆自身的主动安全预警或控制系统来改善车辆的侧倾稳定性。
1998年,美国密歇根大学交通研究中心[3]开发了一套侧翻稳定性预警系统,该系统最大的特点是根据车辆载荷状态和车辆参数来设定静态的侧向加速度阈值。Chen等[4-5]提出了基于车辆侧翻时限的动态侧翻预警算法,该算法的优点是可以使驾驶员提前感知侧翻危险,便于驾驶员对车辆运行状态进行调节。文献[6-7]对车辆的侧翻预警及防侧翻控制进行了比较深入的研究,提出了一系列的重型车辆防侧翻控制算法。朱天军等[8]针对重型车辆的侧翻预警,提出了一种改进型侧翻时限(time to rollover, TTR)方法,该方法将传统TTR中的评价指标侧倾角用侧向载荷转移率代替,并通过实车场地实验数据进行实车验证,取得了一定的实际效果。赵健等[9]在TTR算法中植入了神经网络,并利用多状态参量对传统TTR进行修正,在一定程度上提高了侧翻预警精度,但延长了TTR算法周期,需要对数据进行长时间的神经网络训练,从而降低了侧翻预警的实时性。麦莉等[10]提出了基于模型预测的侧翻预警方法,并开发了能感知侧翻状态的实时侧翻预警控制器。
一般地,传统TTR侧翻预警方法所采用的侧翻评价指标主要为侧倾角或侧向加速度,此类方法是实时监测车辆侧倾角或侧向加速度是否超过某一阈值,一旦超过预设的阈值则进行侧翻预警。然而,在车辆的实际行驶过程中,其侧倾角或侧向加速度的侧翻阈值会随着行车条件的改变而发生动态变化,并非静态、恒定,因而较难对阈值进行精确设定,一旦出现偏差将会降低侧翻预测的精度,最终导致预警提前或滞后。
本文在TTR方法基础上提出一种改进的侧翻评价指标,该评价指标考虑到动态行车过程,将车辆当前侧向加速度与实时侧向极限加速度(acceleration limit value,ALV)的比值这一相对量作为侧翻判定条件,替代传统依靠侧倾角或侧向加速度的绝对量来进行侧翻预测。该评价指标的侧翻阈值选取方法较传统评价指标选取方法更为简单,即当该比值超过1时,则说明车辆当前侧向加速度超过其极限值,侧翻即将发生。具体地,通过对车辆在侧倾方向进行动平衡分析,实时获取车辆侧向极限加速度,进而计算侧向加速度与实时侧向极限加速度的比值,综合该比值和TTR方法来计算车辆在未来发生侧翻的时限值。
1车辆三自由度动力学建模
如图1所示,建立车辆的三自由度动力学模型,主要考虑车辆在侧向、横摆和侧倾等三个方向的动力学状态。

图1 车辆三自由度动力学模型
侧向动力学模型为
(1)
式中,m为整车质量;ay为重心位置的侧向加速度;ms为簧载质量;h为重心到侧倾中心的距离;φ为侧倾角;Ff、Fr分别为前后轮的侧向力;δ为前轮转角。
横摆动力学模型为
(2)
式中,Iz为簧载质量绕垂向的转动惯量;ω为横摆角速度;a、b分别为前后轴距。
侧倾动力学模型为
(3)
(4)
Ff=kfαf
(5)
Fr=krαr
(6)
式中,Ix为簧载质量绕纵向的转动惯量;g为重力加速度;cφ、kφ分别为悬架的等效阻尼系数和等效侧倾刚度;u为车辆纵向速度;v为车辆侧向速度;kf、kr分别为前后轮的等效侧偏刚度;αf、αr分别为前后轮侧偏角。
2改进TTR算法
在车辆三自由度动力学模型的基础上,通过对车辆在侧倾方向上的动平衡分析,实时计算车辆的侧向极限加速度,将车辆当前侧向加速度与实时侧向极限加速度的比值作为侧翻评价指标。同时,结合TTR方法,计算车辆在未来发生侧翻的时限值,进而实现侧翻预警。
2.1侧翻评价指标
车辆在高速转弯工况下,车轮的垂向载荷会发生侧向转移,因而车辆发生侧翻的临界条件即为转弯内侧车轮垂向载荷为零。以车辆向右急转弯为例,通过对车辆在侧倾方向处于临界状态时的力矩动平衡分析,可得车辆侧翻极限条件如下:
(7)
式中,hcm为重心高度;T为轮距。
式(7)中的侧向加速度ay即为实时侧向极限加速度,可得车辆在侧翻临界状态下的侧向极限加速度:
(8)
取Ld=ay/ay,L作为侧翻指标,即
(9)

2.2侧翻时限
侧翻时限的定义为[4]:从当前时刻到车辆发生侧翻时刻的时间间隔,其前提假设为车辆的当前输入在侧翻时限之内保持不变,如车辆的转向角、速度等。
如图2所示,设当前时刻为tw,时间往后推移,车辆在ts时刻发生侧翻,则侧翻时限tTR=ts-tw。通过该算法可计算出当前时刻(侧翻预警时刻)到侧翻发生时刻的间隔,即TTR时间。由TTR的定义可知,理想TTR与时间t的关系为一条斜率k=-1的直线。

图2 理想工况TTR侧翻预警示意图
2.3改进TTR侧翻预警算法
改进TTR侧翻预警算法流程如图3所示。在该预警算法中,TTR值越小,车辆发生侧翻的危险程度越高。当TTR值接近0时,表明车辆即将发生侧翻。
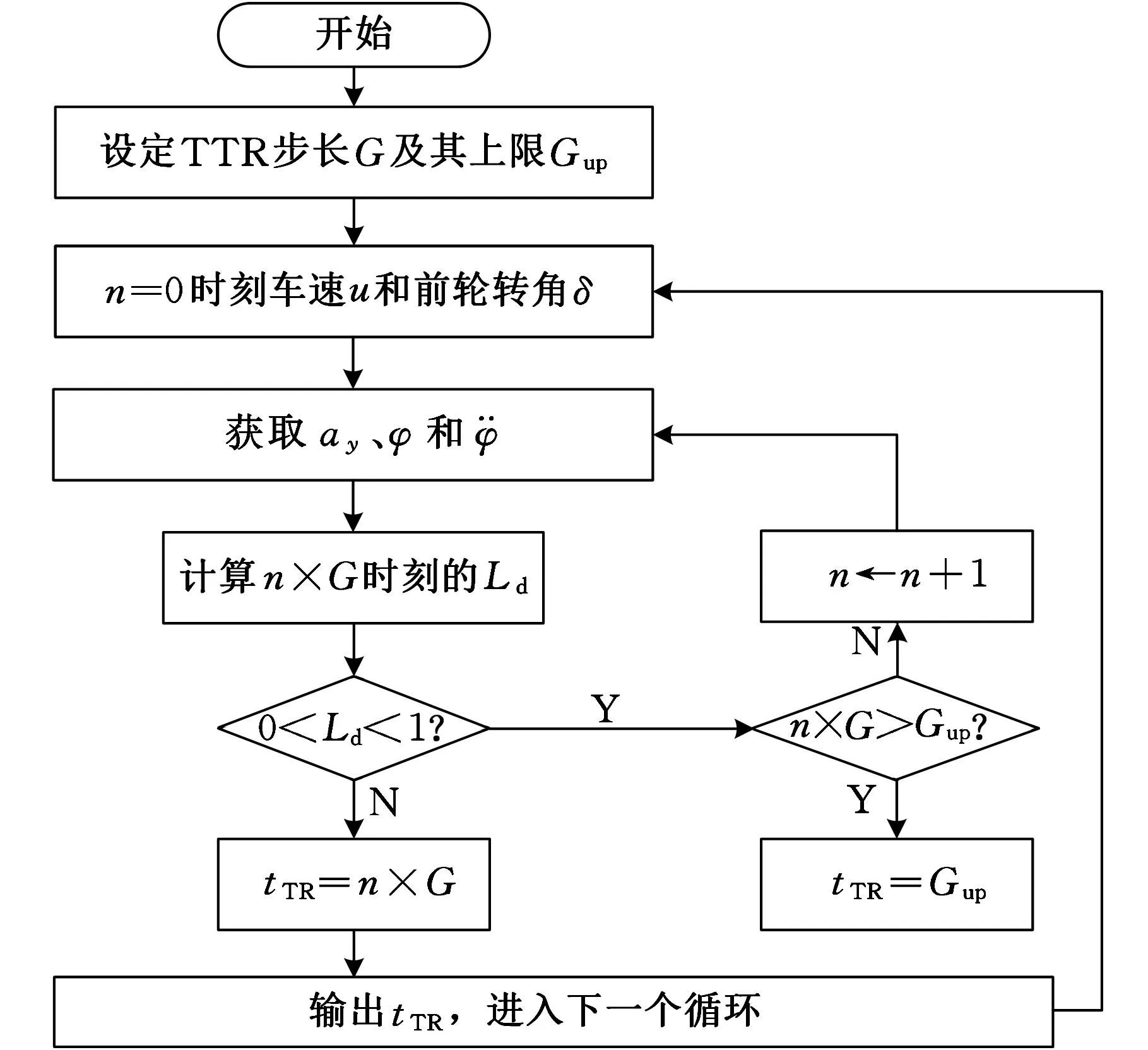
图3 改进TTR侧翻预警算法的流程图
设定TTR算法的计算步长G=20 ms,为避免预警时间持续计算下去,设定预警时间上限值Gup=2 s。根据初始值u和δ计算Ld,当Ld第一次满足侧翻预警条件时,输出侧翻时限n×G。若侧翻时限超过上限值Gup,且Ld仍未满足侧翻预警条件,为了减少计算量,可认为在未来的Gup时间内车辆将处于安全状态,此时直接输出tTR值。
3车辆侧翻预警的仿真分析
以某款SUV作为研究对象,分别在双移线和鱼钩等两种工况下进行实验,实验车速选为80 km/h和100 km/h,对该SUV的侧翻预警算法进行分析,并将传统TTR侧翻预警算法与改进TTR侧翻预警算法进行对比研究。具体地,传统TTR侧翻预警算法主要以车辆侧倾角或侧向加速度为侧翻评价指标,而改进TTR算法则以式(9)计算得到的Ld作为车辆的侧翻评价指标。
3.1车辆侧翻预警仿真
该款SUV车型的基本参数如表1所示。

表1 该款SUV车型的基本参数
同时,选取表2中定义的4种典型工况进行仿真车辆的侧翻实验。
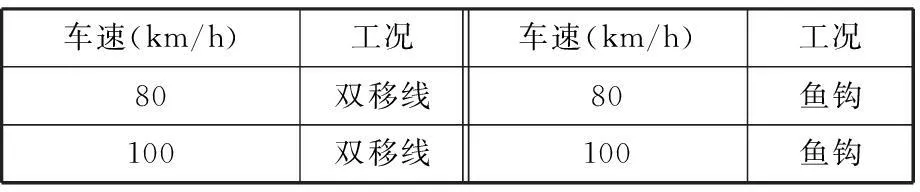
表2 4种典型工况
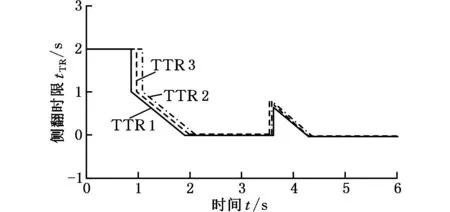
仿真过程中,实验车以定速80 km/h进行双移线、鱼钩等两种典型工况的侧翻实验,前轮转角的幅值均取7°,其侧翻预警仿真结果如图4、图5所示。其中,TTR1为本文提出的改进TTR算法,TTR2为基于侧倾角的传统TTR算法,TTR3为基于侧向加速度的传统TTR算法。

(a)前轮转角

(b)侧翻时限对比图4 双移线实验(80 km/h)

(a)前轮转角

(b)侧翻时限对比图5 鱼钩实验(80 km/h)
同样地,实验车以定速100 km/h进行双移线、鱼钩等两种典型的侧翻实验工况,前轮转角的幅值均取为7°,其侧翻预警仿真结果如图6、图7所示。

(a)前轮转角

(b)侧翻时限对比图6 双移线实验(100 km/h)

(a)前轮转角
(b)侧翻时限对比图7 鱼钩实验(100 km/h)
3.2仿真结果的对比分析
从图4~图7等4种实验工况的仿真结果来看,改进算法的TTR值均小于传统算法的TTR值。在第一个危险预警阶段,改进TTR侧翻预警算法能够先于传统算法进行预警。可见,改进TTR侧翻预警算法能够更早地发现车辆侧翻危险。
由图4中可知,改进TTR侧翻预警算法在2.6s时依旧保持预警状态,而传统TTR侧翻预警算法在2.6s时就已解除侧翻预警,在图5中也出现类似的情况。可见,改进TTR侧翻预警算法相比于传统TTR侧翻预警算法的误报率也更低。
从对比分析的结果来看,改进TTR侧翻预警算法的预警准确性明显优于传统的基于侧倾角或侧向加速度的这两种TTR侧翻预警算法的预警准确性。
4结论
针对车辆侧翻预警问题,建立了包括侧向、横摆、侧倾等方向的三自由度车辆动力学模型。同时,以当前侧向加速度与实时侧向极限加速度的比值为侧翻评价指标,提出了改进TTR侧翻预警算法。传统TTR侧翻预警算法以侧倾角或侧向加速度等作为侧翻评价指标,在进行侧翻预测时其阈值难以准确获取。相比而言,改进TTR侧翻预警算法将当前侧向加速度与实时侧向极限加速度的比值作为侧翻评价指标,其阈值实际上为一个相对值,故取值较为方便。因此,改进TTR侧翻预警算法较传统TTR侧翻预警算法的准确性更高。
参考文献:
[1]ChuDuanfeng,LuXiaoyun,LiGangyan,etal.RolloverPreventionorVehicleswithElevatedCGUsingActiveControl[C]//The10thInternationalSymposiumonAdvancedVehicleControl(AVEC10).Loughborough,UK, 2010:147-152.
[2]褚端峰,李刚炎. 半主动悬架汽车防侧翻控制的研究[J]. 汽车工程,2012,34(5):399-402,432.
ChuDuanfeng,LiGangyan.AResearchonAnti-rolloverControlforVehicleswithSemi-activeSuspension[J].AutomotiveEngineering,2012,34(5): 399-402,432.
[3]UniversityofMichigan.CooperativeAgreementtoFostertheDeploymentofaHeavyVehicleIntelligentDynamicStabilityEnhancementSystemInterimReport[R].AnnArbor:UniversityofMichigan, 1998.
[4]ChenB,PengH.DifferentialBrakingBasedRolloverPreventionforSportUtilityVehicleswithHumanintheLoopEvaluations[J].VehicleSystemDynamic, 2001,36(4/5):359-389.
[5]ChenB.WarningandControlforVehicleRolloverPrevention[D].AnnArbor:UniversityofMichigan, 2002.
[6]张不扬,宗长富,王德平. 车辆侧翻预警研究现状与关键技术[J]. 汽车技术,2010,419(8):27-31.
ZhangBuyang,ZongChangfu,WangDeping.StatusofResearchandKeyTechnologyofVehicleRolloverWarningSystem[J].AutomobileTechnology, 2010, 419(8): 27-31.
[7]于志新,宗长富. 基于TTR预警的重型车辆防侧翻控制算法[J]. 吉林大学学报(工学版), 2009,39(9):252-253.
YuZhixin,ZongChangfu.AlgorithmsofAnti-rolloverControlforHeavyVehicleBasedonTTRWarning[J].JournalofJilinUniversity(EngineeringandTechnologyEdition), 2009,39(9):252-253.
[8]朱天军,宗长富,吴炳胜,等. 基于改进TTR算法的重型车辆侧翻预警系统[J]. 机械工程学报,2011,47(10):88-94.
ZhuTianjun,ZongChangfu,WuBingsheng,etal.RolloverWarningSystemofHeavyDutyVehicleBasedonImprovedTTRAlgorithm[J].JournalofMechanicalEngineering, 2011, 47(10): 88-94.
[9]赵健,郭俐彤,朱冰,等. 基于神经网络和侧翻时间算法的轻型汽车侧翻预警[J]. 吉林大学学报(工学版),2012,42(5):1083-1088.
ZhaoJian,GuoLitong,ZhuBing,etal.RolloverWarningforLightVehiclesBasedonNN-TTRAlgorithm[J].JournalofJilinUniversity(EngineeringandTechnologyEdition), 2012, 42(5): 1083-1088.
[10]麦莉,曲伟,朱天军,等, 基于模型预测的重型商用车侧翻预警算法[J].吉林大学学报(工学版), 2010, 40(4):906-910.
MaiLi,QuWei,ZhuTianjun,etal.RolloverWarningAlgorithmofHeavyCommercialVehicleBasedonModelPrediction[J].JournalofJilinUniversity(EngineeringandTechnologyEdition), 2010, 40(4):906-910.
(编辑袁兴玲)
Research on Vehicular Rollover Warning Based on Improved TTR Algorithm
Chu Duanfeng1,2Cui Jian1,2Deng Zejian1,2Tian Fei1,2Wu Chaozhong1,2
1.Wuhan University of Technology,Wuhan, 430063 2.Engineering Research Center for Transportation Safety,Ministry of Education,Wuhan, 430063
Abstract:The TTR method might realize vehicle rollover warning, but there existed some problems(i.e. premature warning, hysteretic warning), because rollover threshold was difficult to precisely set up due to changing traffic conditions. In order to improve the traditional TTR method and the effectiveness of vehicle rollover warning, three degrees of freedom of vehicle dynamics model was established. A rollover evaluation index was proposed by using the relative value, i.e. ratio of immediate lateral acceleration to the real time lateral limit acceleration, instead of absolute value such as roll angle or lateral acceleration for rollover warning. According to the current vehicle dynamic states, TTR value in the forthcoming was calculated in real time. Finally, based on the improved TTR, the criticality of rollover threat in the forthcoming was predicted, and the vehicle rollover warning was achieved. The results show that comparing with two traditional TTR rollover warning algorithms, the improved TTR rollover warning algorithm may be used to predict rollover more precisely.
Key words:rollover warning; improved time to rollover(TTR); vehicle dynamics; limiting lateral acceleration
收稿日期:2015-08-25
基金项目:国家科技支撑计划资助项目(2014BAG01B03);车路协同与安全控制北京市重点实验室开放基金资助项目
中图分类号:U461.91
DOI:10.3969/j.issn.1004-132X.2016.11.025
作者简介:褚端峰,男,1983年生。武汉理工大学智能交通系统研究中心副研究员、博士。主要研究方向为车辆动力学与控制、智能交通系统等。崔剑,男,1991年生。武汉理工大学智能交通系统研究中心硕士研究生。邓泽健,男,1994年生。武汉理工大学智能交通系统研究中心硕士研究生。田飞,男,1990年生。武汉理工大学智能交通系统研究中心硕士研究生。吴超仲,男,1972年生。武汉理工大学智能交通系统研究中心主任、教授。
