
四自由度主动磁轴承-转子系统动力学仿真及试验研究
2016-06-27 03:57李朋宾刘廷武中国燃气涡轮研究院四川江油621703
燃气涡轮试验与研究 2016年2期
李朋宾,刘廷武(中国燃气涡轮研究院,四川江油621703)
四自由度主动磁轴承-转子系统动力学仿真及试验研究
李朋宾,刘廷武
(中国燃气涡轮研究院,四川江油621703)
摘要:主动磁轴承作为航空多电发动机转子支承结构的首选方案,其转子系统动力学特性对多电发动机工作性能具有重大影响。以径向四自由度主动磁轴承-转子系统为研究对象,在分析径向四自由度主动磁轴承-转子运动微分方程的基础上,推导了系统状态方程。建立系统仿真模型,对转子轴颈运动轨迹进行计算。试验结果与计算结果对比表明,两者具有较为明显的一致性,但运动轨迹半径差距较大,仿真模型有待进一步优化。
关键词:多电发动机;主动磁轴承;状态方程;动力学模型;仿真计算;运动轨迹;试验
1 引言
磁悬浮多电发动机技术是IHPTET计划中的主要研究内容之一[1],已受到包括我国在内的世界许多国家的高度重视。目前,航空多电发动机转子支承结构的首选方案为主动磁轴承[2]。主动磁轴承利用电磁力将转子悬浮于空间,使定子和转子之间无机械接触,可实现转子振动主动控制。主动磁轴承-转子系统动力学特性对多电发动机工作性能具有重大影响,进行主动磁轴承-转子系统动力学分析和试验研究,具有重要的理论意义以及工程应用价值。在已有的磁轴承-转子系统数学模型中,往往采用四个独立的单自由度磁悬浮控制系统来构成径向磁轴承控制系统,进行模型简化[3]。由于轴径倾斜以及转子高速旋转时陀螺效应等因素引起的径向磁轴承间的耦合,单自由度模型的误差较大。为此,本文以某径向四自由度耦合的主动磁轴承系统为研究对象,推导了该系统状态方程并建立了仿真模型,对仿真结果及试验结果进行了分析研究,所得研究结果对主动磁轴承系统的设计具有一定的指导意义。
2 四自由度主动磁轴承-转子系统动力学模型的建立
2.1径向四自由度主动磁轴承-转子结构
转子在空间共有六个自由度,其中五个自由度(四个径向与一个轴向)由磁轴承约束,另一个绕自身轴线旋转的自由度由电机或其他动力驱动[4]。由于轴承的布局通常使推力轴承的力矢量作用在过质心的直线上,轴向运动和径向运动彼此独立,因而这一系统控制可分为轴向单自由度控制和径向四自由度控制两部分[5]。本文对径向四自由度主动磁轴承系统进行研究,其结构如图1所示。转子由外部电机带动,径向四个自由度方向上的运动由图中的两个径向磁轴承A和B控制。系统中采用的位移传感器是非接触式电涡流传感器,在径向磁轴承两侧等轴向距离处分别设置位移传感器,以获取转子在对应径向磁轴承方向上的偏移量。
2.2四自由度主动磁轴承-转子系统状态方程
转子的四自由度坐标见图1。图中,la、lb分别为径向磁轴承A和B距转子质心c的距离。转子质心坐标为(xc,yc),径向磁轴承A、B坐标分别为(xa,ya)和(xb,yb),转子质量为mc,转子绕z轴角速度为Ω,绕x、y轴的转动惯量分别为Ix和Iy且Ix= Iy,绕z轴的转动惯量为Iz,α、β分别为绕x轴和y轴的转角。在径向磁轴承A、B处,转子沿x和y方向的电磁力分别为Fxa、Fxb、Fya、Fyb。
根据牛顿第二定律和动量矩定律,转子质心的动力学微分方程组为:

将式(1)整理成如下矩阵形式:


在工作点(平衡位置)附近,磁轴承的电磁力可写成线性化形式[6],各电磁铁的位移刚度kx和电流刚度ki的值相同,径向磁轴承A、B对应线圈中控制电流分别为ixa、ixb、iya、iyb,则:

径向磁轴承A、B坐标qb与转子质心c坐标qc之间的关系为:

将式(3)、式(4)代入式(2),得:

取状态变量,控制变量u = i,由式(5)可得状态方程:

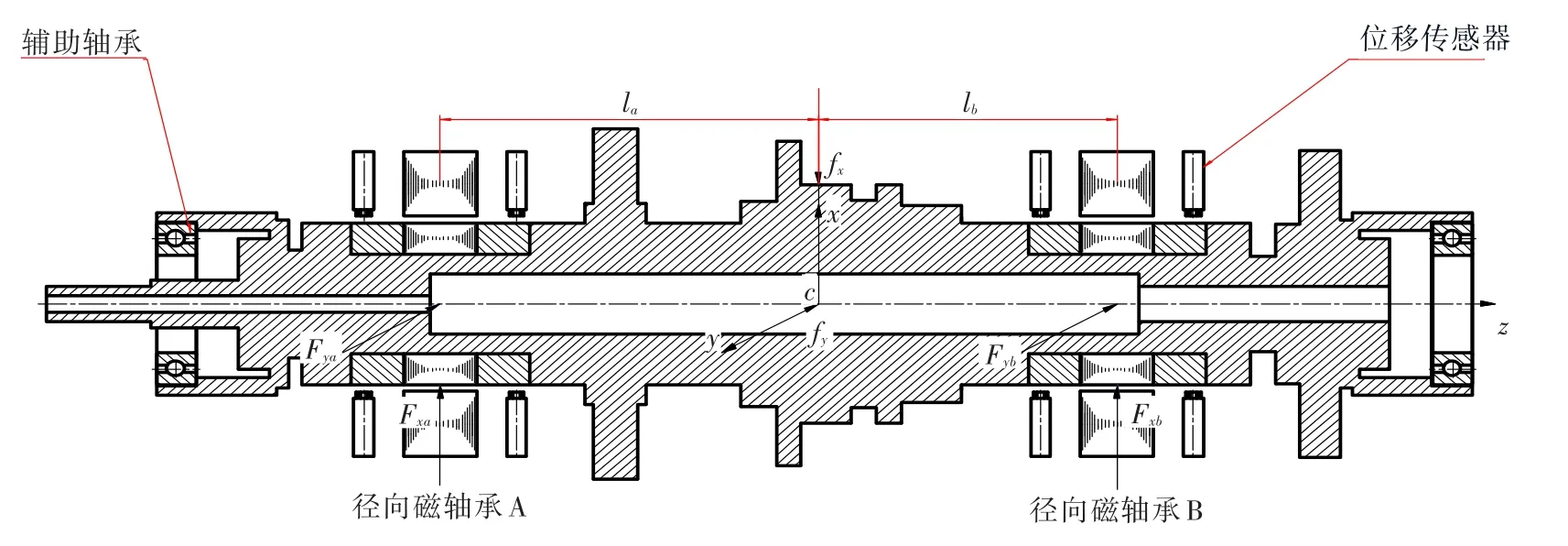
图1 径向四自由度主动磁轴承-转子系统结构示意图Fig.1 Structure diagram of the radial four-degree-of-freedom active magnetic bearings rotor system
取输出变量Yb= qb,则输出方程为:

式中:Cb=。
当考虑施加于转子质心上的不平衡力或外扰力fx、fy时,式(6)将变为以下形式:

fx= mcsεΩ2cos( Ωt),fy= mcsεΩ2sin (Ωt)。
式中:s为磁轴承径向间隙,ε为转子偏心距与轴承间隙比。
3 四自由度主动磁轴承-转子系统仿真
3.1径向四自由度主动磁轴承-转子系统仿真模型
径向四自由度主动磁轴承-转子系统仿真模型在Matalab的Simulink环境中开发,图2为系统仿真模型图。设置系统的机械参数与电气参数,仿真得到转子运动轨迹。
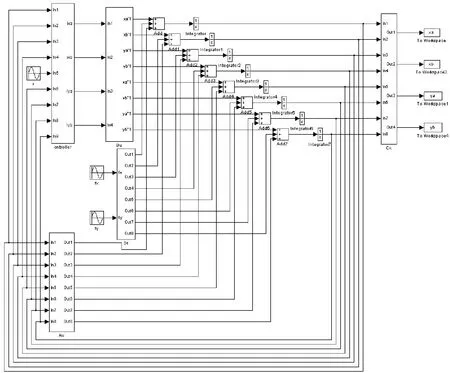
图2 径向四自由度主动磁轴承-转子系统仿真模型Fig.2 Simulation model of the radial four-degree-of-freedom active magnetic bearing rotor system
3.2系统仿真结果

表1 模型相关参数Table 1 Relative parameters of the model
对图1所示四自由度主动磁轴承-转子系统进行仿真,模型相关参数如表1所示。仿真得到的转子对应径向磁轴承A、B支承处轴心运动轨迹如图3所示。可见,转子在径向磁轴承A、B支承处具有相似的运动轨迹,均从平衡位置开始快速进入以平衡位置为中心的稳定类圆形轨迹,但磁轴承B支承处类圆形轨迹半径比磁轴承A支承处大。同时,转子运转过程中,磁轴承A、B支承处转子运动轨迹与磁轴承间隙圆具有较大的间隙裕度。

图3 磁轴承A、B支承处转子轴颈运动轨迹Fig.3 Trajectories of the rotor journal for A and B
4 四自由度主动磁轴承-转子系统试验研究
4.1试验设备
在辅助轴承试验器上对该径向四自由度主动磁轴承-转子系统进行试验研究。试验设备包括:安装转子和径向主动磁轴承及配套辅助轴承的试验装置,驱动转子旋转的高速电机,及数据采集分析系统等。
4.2试验结果分析
开启高速电机,调节电机转速,待转速稳定后采集位移信号并进行数据处理,分别得到了3 000、5 000、8 000 r/min转速下径向磁轴承A、B支承处转子轴心轨迹,如图4~图6所示。
对比图4~图6发现:不同转速下转子在磁轴承A、B支承处均表现出相似的运动轨迹,且磁轴承B支承处类圆形轨迹半径比磁轴承A支承处类圆形轨迹半径大,这一现象与3.2节仿真结果较为一致;三种不同转速下,转子均实现稳定运转,且随着转子转速的升高,磁轴承A、B支承处转子类圆形运动轨迹半径呈增大趋势,转速由3 000 r/min上升至5 000 r/min时该趋势尤为明显。

图4 3 000 r/min转速下磁轴承A、B支承处转子轴颈运动轨迹Fig.4 Trajectories of the rotor journal for A and B at the speed of 3 000 r/min

图5 5 000 r/min转速下磁轴承A、B支承处转子轴颈运动轨迹Fig.5 Trajectories of the rotor journal for A and B at the speed of 5 000 r/min

图6 8 000 r/min转速下磁轴承A、B支承处转子轴颈运动轨迹Fig.6 Trajectories of the rotor journal for A and B at the speed of 8 000 r/min
将3.2节仿真结果与转子转速5 000 r/min下试验结果进行对比,见图7。可见:仿真得到的磁轴承A、B支承处转子运动轨迹,与试验得到的运动轨迹具有较为明显的一致性,但其初始点位置略有偏差;相比于仿真结果,试验中磁轴承A、B支承处转子运动初期轨迹更加复杂纷乱,其类圆形运动轨迹半径也明显较大。

图7 仿真与试验结果对比Fig.7 Comparison of simulation results with test results
5 结论
本文分析讨论了四自由度主动磁轴承-转子运动微分方程,建立了系统状态方程和系统动力学仿真模型。通过计算和试验测试,得到了磁轴承支承处转子运动轨迹。结果表明:
(1)四自由度主动磁轴承-转子系统在3 000 r/min转速下运转状态极好,在较高转速5 000 r/min 及8 000 r/min下运转状态明显变差,而这些转速均远小于该系统转子一阶临界转速47 700 r/min,应当优化系统机械参数与电气参数。
(2)计算所得磁轴承支承处转子运动轨迹与试验测试所得运动轨迹具有较明显一致性,但两者类圆形运动轨迹半径差距较大,需进一步优化仿真模型。
参考文献:
[1]徐龙祥,周波.磁浮多电航空发动机的研究现状及关键技术[J].航空动力学报,2003,18(1):51—59.
[2]刘廷武,黄凯.辅助轴承探索性试验研究[C]//.第八届发动机试验与测试学术讨论会论文集. 2006.
[3]黄义,胡业发.基于DSP的磁悬浮轴承数字控制系统的研究与应用[J].武汉理工大学学报(信息与管理工程版),2005,(5):185—188.
[4]沈钺,虞烈.四自由度电磁轴承—转子系统的数学模型与仿真[J].机床与液压,2001,(4):23—24.
[5]薛晓艳,刘文胜,苏建,等.主动磁轴承径向四自由度转子数学模型与仿真[J].自动化技术与应用,2008,27 (4):42—45.
[6]Schweitzer G,Maslen E H.磁悬浮轴承——理论、设计及旋转机械应用[M]徐旸,译.北京:机械工业出版社,2012.
Simulation and test research on dynamics of a four-degree-of-freedom active magnetic bearing-rotor system
LI Peng-bin,LIU Ting-wu
(China Gas Turbine Establishment,Jiangyou 621703,China)
Abstract:As the perfect choice for the supporting of aviation more-electric turbine engine,the active mag⁃netic bearing rotor system's dynamic characteristics have great impacts on the working performance of more-electric turbine engine. Taking a radial four-degree-of-freedom active magnetic bearing rotor system as the research object and based on the analysis of differential motion equations,the system state equations were inferred. A simulation model for the radial four-degree-of-freedom active magnetic bearing rotor sys⁃tem was established,and then the trajectory of rotor journal was calculated. Comparing the test results with the simulation results,there is great coherence between the two,but the gap of the trajectory radius is large,and the simulation model needs to be further optimized.
Key words:more-electric turbine engine;active magnetic bearing;state equations;dynamic model;simulation;trajectory;test
中图分类号:V233.4+5
文献标识码:A
文章编号:1672-2620(2016)02-0021-05
收稿日期:2015-06-26;修回日期:2016-04-21
作者简介:李朋宾(1987-),男,河北鹿泉人,助理工程师,硕士,主要从事航空发动机机械系统试验技术研究。
猜你喜欢
煤气与热力(2021年6期)2021-07-28
兵器装备工程学报(2021年1期)2021-02-22
价值工程(2018年13期)2018-05-03
北京航空航天大学学报(2017年1期)2017-11-24
世界汽车(2017年8期)2017-08-12
世界汽车(2017年8期)2017-08-12
世界汽车(2017年8期)2017-08-12
汽车与安全(2016年5期)2016-12-01
太空探索(2016年12期)2016-07-18
科技经济市场(2014年5期)2014-09-09
