
基于惯导和无时延滤波器的舰船升沉测量
2016-06-27 01:24严恭敏苏幸君秦永元
导航定位学报 2016年2期
严恭敏,苏幸君,翁 浚,秦永元
(西北工业大学 自动化学院,西安 710072)
基于惯导和无时延滤波器的舰船升沉测量
严恭敏,苏幸君,翁浚,秦永元
(西北工业大学 自动化学院,西安710072)
摘要:在利用惯导测量舰船的升沉运动中,针对传统方法设计的高通数字滤波器存在较大的相位滞后误差(即信号处理后的时间延迟误差)问题,提出一种滤波器设计方法:通过先设计传统的无限冲激响应低通滤波器,再采用互补方法将其转换为无相位滞后的高通滤波器,解决了信号时延问题;阐述了舰船升沉测量信号处理过程,即根据舰船上惯导姿态信息和加速度计采样输出,解算并给出天向加速度,通过积分和无时延高通滤波处理,获得升沉运动信息。最后,利用海上舰船试验数据进行验证,结果表明该方法的升沉测量精度提高了一个数量级。
关键词:升沉运动测量;惯导;无时延数字滤波器;海试
0引言
舰船在海上航行过程中,不可避免地会受到海浪和海风等复杂海洋环境因素的扰动,被动地产生6自由度的摇荡运动,包括3个角运动纵摇、横摇和艏摇,以及3个线运动横荡、纵荡和垂荡(即升沉),其中纵横摇和升沉运动对舰船的影响和危害最大[1]。舰船一般体型大并且吨位重,其加减速和转向都需要较长时间,这些主动航行运动通常被视为低频运动,周期在30 s以上;相比而言,被动的摇荡运动是与海浪运动频率大体一致的往复运动,可视为高频运动,周期通常在10 s左右[2-3]。在许多场合,舰船升沉信息的实时精确测量具有非常重要的应用价值,比如舰载机的起降、舰载武器的发射、气垫船登陆、钻井平台升沉补偿装置的补偿设计以及舰船补给等[2]。
目前利用惯导和卫星进行组合导航容易实现舰船的高精度3维定位,可达m级的绝对定位精度;但是在升沉应用中往往要求cm级的短时相对测量精度,这是常规组合导航方法难以达到的。所以,舰船升沉运动测量还主要是依靠惯导,即利用惯导在垂荡方向的综合加速度输出,通过积分求解升沉运动信息。然而由于惯导系统的误差累积和高度通道发散特性,导致其不适合于精确测量长周期的位移变化,只能用于测量短周期的相对运动。通常借助高通数字滤波器滤除舰船长周期运动和加速度计偏值测量误差的影响[1-5];但需尽量保留短周期的运动信息,从而实现前述的舰船主动和被动运动频段的分离,获得准确的升沉运动信息。
论文首先介绍了传统高通数字滤波器的设计方法,针对其不足之处改进设计了互补高通滤波器;再给出了利用惯导进行舰船升沉运动测量的基本方法;最后对舰船实测海试数据进行了验证。
1传统高通滤波器设计方法
数字滤波器设计包括2种典型的类型,即有限冲激响应滤波器(finite impulse response,FIR)和无限冲激响应滤波器(infinite impulse response,IIR)。在许多应用场合,FIR虽然具有严格线性相位的优点,但是其阶数通常比较高[6]。比如当信号采样频率10 Hz(即周期0.1 s)时,欲设置通带频率0.02 Hz(周期50 s)的滤波器,则大约至少需要2×10/0.02=1000阶,在实时处理时计算量较大。因而常常选用IIR滤波器,能够有效降低计算量。IIR滤波器采用递归算法,一般阶数比较低时就能满足高性能信号处理对幅频特性的要求。目前IIR和FIR 2类数字滤波器的设计方法都已非常成熟,但手动按规则逐步设计还是非常繁琐[7],往往需借助相应软件工具来实现,比如Matlab/fdatool滤波器设计和分析工具。以下主要讨论IIR高通数字滤波器的设计。
使用Matlab/fdatool工具设计Butterworth型高通滤波器,其中采样频率10 Hz、通带频率0.02 Hz(0 dB)、阻带频率0.002 Hz(-40 dB),结果滤波器传递函数为一个3阶的系统,其幅相特性如图1所示。从图1中可以看出,该滤波器的幅频特性比较完美,但相频特性在靠近阻带附近时存在较大的相位滞后,比如图中在频率0.02 Hz处相位滞后约为1 rad,这相当于1 rad/2π/0.02 Hz≈8 s时延。即使有用信号的频段落在高通滤波器通带范围内,相位滞后也会使得滤波输出信号不能实时反映输入的变化,从而带来时延测量误差,比如图1中在频率0.1 Hz处,时延约为0.2 rad/2π/0.1 Hz≈0.3 s,这是传统数字滤波器设计方法难以避免的。

图1 IIR高通滤波器的幅相特性
2无时延互补高通滤波器设计方法
同样以IIR滤波器为例,通过互补方法设计无时延高通滤波器的基本思路介绍如下:
对于宽频带的输入信号x(z), 如果信号通过低通滤波器Hl(z), 则输出信号为
yl(z)=Hl(z)x(z)。
(1)
它是低频信号。显然,被低通滤波器Hl(z)滤除的信号为x(z)-yl(z), 滤除的主要成分必然是高频的。从互补角度看,如果想保留高频分量,则可定义高频信号为
yh(z)=x(z)-yl(z)。
(2)
即有
yh(z)=x(z)-Hl(z)x(z)=
[1-Hl(z)]x(z)=Hh(z)x(z)。
(3)
式中
Hh(z)=1-Hl(z)。
(4)
式(4)即为所需的互补高通滤波器的传递函数,它是通过设计传统的低通滤波器Hl(z)间接实现的:当Hl(z)的阻带衰减足够大时,Hl(z)对高频信号阻止性强;反过来看,根据互补性可知Hh(z)恰好能够让高频信号畅通无阻,并且时延很小,可忽略不计,所以文中称Hh(z)为无时延高通滤波器。由此可见,与传统直接设计高通滤波器相比,文中通过转换设计思路,采用互补方法设计的高通滤波器能够有效避免时延问题的影响。
例如,首先设计一个Butterworth型低通滤波器,其中采样频率10 Hz、通带频率0.002 Hz(0 dB)、阻带频率0.02 Hz(-40 dB),再利用上述互补方法如式(4)生成高通滤波器,其幅相特性如图2所示。
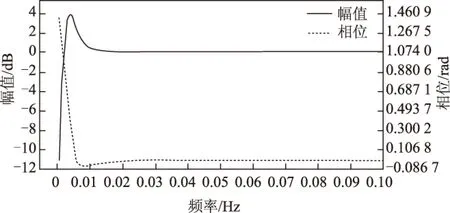
图2 基于互补法设计的高通滤波器幅相特性
图2显示,利用互补法设计的高通滤波器在高频段(>0.02 Hz)相位滞后近似为零,即几乎不存在时延。当然,互补法滤波器在阻通过渡带的幅频特性不够理想,图中大约在0.005 Hz处存在峰值4 dB的增益,这是以高频段的相频特性改善为代价的。
3舰船升沉运动测量原理

(5)

(6)


图3 升沉运动信号处理过程
在图3中积分运算在离散域的传递函数表示为

(7)
如果采用纯积分环节的话,在图3中即使高通滤波器Hh(z)是稳定的,从加速度输入a到升沉位移输出h之间的传递函数也是临界稳定的。为了保证整个升沉运动信号处理系统的绝对稳定性,须将纯积分环节修改为惯性积分环节,可令

(8)
式中:Ts为离散化积分步长(即采样周期);τ为惯性积分环节的惯性时间常数,一般选择τ大于升沉运动中的最长升沉周期参数。
至此,如果将纯积分改为惯性积分,并将多个高通滤波器合并为1个更高阶的高通滤波器,信号处理图3可等效为图4。

图4 等效的升沉运动信号处理过程
4海试验证
利用某型号光纤惯导系统在舰船上进行海试,惯导中陀螺的随机常值漂移约为0.03°/h,加速度计的逐次启动随机常值偏值约为200 μg(g=9.8 m/s2)。舰船大约以16节匀速航行,记录下惯导的姿态信息以及原始加速度计采样数据,作事后升沉运动处理和分析。为了评判本文所提升沉运动处理算法的精度,这里同时使用Matlab中的零相位滤波器函数filtfilt(即无时延滤波器,它不能用于实时处理而只能作为事后处理使用[9-10])处理数据,以其输出作为升沉位移精度的参考基准。
图5给出了试验数据在580~610 s时间段内的升沉位移曲线,图中实线为使用filtfilt滤波处理的升沉参考值,升沉幅值最大约0.2 m、周期约在4~6 s之间;虚线为采用本文新方法滤波的结果,它与参考值吻合得比较好,说明了本文算法的高精度;此外,图5中还给出了传统高通滤波器的处理结果,如点划线所示,很明显传统方法存在较大的时间延迟误差,时延大约为0.5 s。

图5 升沉位移试验结果
同样以filtfilt滤波结果作为参考基准,表1给出了传统升沉处理方法和本文方法的均方根值(root meam square,RMS)精度统计结果。由表1可见:由于时延的影响,传统方法的实时升沉测量精度不高,误差约为最大升沉幅值的1/3;而新方法的精度提高了约1个数量级。

表1 升沉测量精度统计
5结束语
舰船在航行过程中由于受到海浪等因素干扰,会产生6自由度摇荡,对其进行实时测量和补偿具有重要的应用价值。传统方法设计的数字高通滤波器不可避免地存在较大的相位滞后或时延问题,论文通过转变滤波器的设计思路,即先设计低通数字滤波器,再基于互补方法转换为高通滤波器,从而获得无时延高通数字滤波器。最后,对舰船海上航行捷联惯导实测数据进行了升沉运动信号处理和分析,结果表明该滤波器具有明显的测量无时延和精度高等优点。
参考文献
[1]王允峰.船舶纵横摇和升沉运动预报方法研究[D].哈尔滨:哈尔滨工业大学,2010:1-2.
[2]孙伟,孙枫.基于惯导解算的舰船升沉测量技术[J].仪器仪表学报,2012,33(1):167-172.
[3]李德彪.激光陀螺捷联惯导垂向通道测量研究[J].光学与光电技术,2012,10(3):51-54.
[4]iXBlue.ixblue-ps-octans_v-04-2015.pdf[EB/OL].(2015-04-01)[2015-11-15].http://www.ixblue.com/products/octans.
[5]刘星伯.基于捷联航姿系统的舰船瞬时线运动信息测量研究[D].哈尔滨:哈尔滨工业大学,2009:2-3.
[6]奥本海姆A V,谢弗R W,巴克J R.离散时间信号处理[M].刘树棠,黄建国,译.2版.西安:西安交通大学出版社,2001:352-412.
[7]刘兴,张鹤.基于MATLAB的IIR数字滤波器的设计与仿真分析[J].机电设备,2015(5):67-72.
[8]秦永元.惯性导航[M].2版.北京:科学出版社,2015:224-226.
[9]纪跃波,秦树人,汤宝平.零相位数字滤波器[J].重庆大学学报,2000,23(6):4-7.
[10]吴国乔,王兆华.基于全相位的零相位数字滤波器的设计方法[J].电子与信息学报,2007,29(3):574-577.
Measurement of ship’s heave motion based on INS and zero-phase-delay digital filter
YAN Gongmin,SU Xingjun,WENG Jun,QIN Yongyuan
(School of Automation,Northwestern Polytechnical University,Xi’an 710072,China)
Abstract:INS (Inertial Navigation System) is always used as a key device to determine the ship’s heave motion,while the technique by using a traditional high-pass digital filter exists a large phase delay error,that is,the filtered heave signal output is severely delayed compared with its actual heave motion.Aiming at the mentioned problems,a method for high-pass filter design was proposed.At first a traditional IIR (Infinite Impulse Response) low-pass filter was designed,then with a so-called complementary technique the low-pass filter was converted into zero-phase-delay high-pass filter,which could effectively solve the problem of signal delay.In ship’s heave application,the INS accelerometers’ specific force outputs were transformed by INS attitude matrix to form vertical acceleration,and then processed by integral and zero-delay high-pass filter to obtain the ship’s heave motion parameters.Finally,a sea-trial data was processed offline and the results verified an improvement of one order of magnitude with the proposed filter design technique.
Keywords:heave measurement;INS;zero-phase-delay digital filter;sea-trial
收稿日期:2015-10-22
第一作者简介:严恭敏(1977—),福建建瓯人,男,博士,副教授,主要从事惯性导航与信息融合理论研究。
中图分类号:V249.3
文献标志码:A
文章编号:2095-4999(2016)02-0091-04
引文格式:严恭敏,苏幸君,翁浚,等.基于惯导和无时延滤波器的舰船升沉测量[J].导航定位学报,2016,4(2):91-93,107.(YAN Gongmin,SU Xingjun,WENG Jun,et al.Measurement of ship’s heave motion based on INS and zero-phase-delay digital filter[J].Journal of Navigation and Positioning,2016,4(2):91-93,107.)DOI:10.16547/j.cnki.10-1096.20160219.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
数字海洋与水下攻防(2020年5期)2021-01-04
军工文化(2019年12期)2019-03-31
环球时报(2018-06-22)2018-06-22
环球时报(2018-05-19)2018-05-19
北京航空航天大学学报(2018年1期)2018-04-20
环球时报(2017-11-09)2017-11-09
导航与控制(2017年4期)2017-08-01
北京航空航天大学学报(2016年3期)2016-02-27
计算技术与自动化(2014年1期)2014-12-12
