
基于STM32和超声波测距的倒车雷达预警系统设计*
2016-06-24 00:30金永威
传感器与微系统 2016年4期
韩 韧, 金永威, 王 强
(1.上海理工大学 光电信息与计算机工程学院,上海 200093;2.河南大学 软件学院,河南 开封 475000)
设计与制造
基于STM32和超声波测距的倒车雷达预警系统设计*
韩韧1, 金永威1, 王强2
(1.上海理工大学 光电信息与计算机工程学院,上海 200093;2.河南大学 软件学院,河南 开封 475000)
摘要:针对目前大多数经济实用型汽车、货车等车辆没有装备倒车雷达的现状,设计出一种成本低、结构简单、可靠性高的倒车雷达预警系统。硬件设计主要包括超声波测距电路、单片机控制电路、LCD显示电路、报警电路等;软件设计主要包括超声波测距原理介绍和系统软件工作流程等。汽车倒车时,该系统能够检测出汽车后面障碍物的距离,并且在LCD上实时显示汽车与障碍物之间的距离;当障碍物与车之间的距离超出预先设定的报警距离时,该系统会发出声光报警,提高安全性。实验结果表明:该系统在20~500 cm范围内可实现准确测距,最大平均误差不超过3 %,能够在预设的报警距离处及时报警,达到预期目的,具有经济实用、操作简单、性能好等优点。
关键词:超声波测距; 倒车雷达; 单片机; 液晶显示; 声光报警
0引言
随着我国汽车工业的快速发展,人们生活水平的不断提高,越来越多的家庭拥有了自己的汽车。然而汽车数量的逐渐增加,给人们带来便利的同时,由于倒车引发的事故也越来越多[1],使得人们越来越担心倒车的安全问题,为此,在汽车上安装倒车雷达系统日益受到重视。
目前生产的大多数中高档汽车基本都装配有倒车雷达系统,然而出于对价格的考虑,很多经济实用型汽车、货车等车辆还没有装配倒车雷达系统[2,3]。针对上述情况,本文设计出一种成本低、操作简单、性能好的倒车雷达预警系统,当汽车需要倒车时,该系统能够检测出汽车后面障碍物的距离,并且实时显示该距离,一旦汽车与障碍物的距离小于预先设定的报警距离时,该系统会发出声光报警。该系统克服了传统倒车雷达系统成本高、结构复杂等问题,使得经济实用型汽车、货车等车辆可以安装上经济实用的倒车雷达系统,提高倒车的安全性。
1系统总体设计
本文设计了一种性价比较高的倒车雷达预警系统。其设计思路是当汽车启动倒档时,倒车雷达预警系统也被开启,通过该系统的超声波测距模块实时测量汽车与障碍物之间的距离,为了使测量结果更加精确,系统加入了温度补偿电路,最后在LCD1602显示屏上显示距离障碍物的距离,当汽车距离障碍物小于预设的报警距离时,系统会发出声光报警,提醒驾驶员注意安全。
实现以上功能的系统结构框图如图1所示。
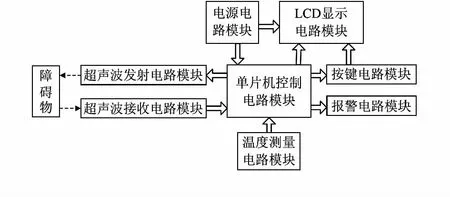
图1 系统结构框图Fig 1 Block diagram of system structure
2系统硬件设计
2.1单片机控制电路模块
本系统单片机选用STM32F103C8T6,是一种基于ARM32位的Cortex—M3内核的单片机,工作电压范围为2.0~3.6V,CPU工作频率最高可达72MHz,具有速度快、成本低、性价比高等优点[4]。单片机控制系统电路如图2所示。其中图2(a)为单片机接口电路模块:单片机是系统的控制中心,控制着其它模块的工作;图2(b)是温度测量电路模块:由于超声波传播速度容易受到温度的影响,其传播速度v与环境温度T的关系式为v=331.4+0.607 T(m/s),为了获得较为准确的声速,该系统引入主要由数字温度传感器DS18B20组成的温度补偿电路[5]对环境温度进行测量,以提高测量精度,减少误差。键电路模块:主要用于对报警距离的设定,其中按键S1表示“加一”、按键S2表示“减一”、按键S3表示“确定”按键、按键S4用于报警系统的清零。电源电路模块:采用芯片LM7805将12V电压转换为5V电压、采用芯片AMS1117将5V电压转换成3.3V电压。

图2 单片机控制系统电路Fig 2 Circuit of MCU control system
2.2超声波测距电路模块
超声波测距电路模块包括超声波发射和接收电路模块。其中超声波发射电路模块使用超声波发射探头CSB40T,利用LM555时基电路振荡产生40kHz的超声波,由LM555第3引脚输出端驱动超声波探头,使之发射出超声波信号[6],电路如图3所示。为了调节信号频率,电路设计中加入了可调电阻Rp,可以通过调节电阻Rp的阻值改变振荡频率,使之与超声波探头40kHz的固有频率保持一致。

图3 超声波发射电路Fig 3 Ultrasonic transmitter circuit
超声波接收电路模块需要完成的任务是将获取的信号进行处理,给单片机以提示,证明已经接收到回波信号,从而能够确认超声波在空气中所传播的时间。该模块选用红外接收芯片CX20106和超声波接收探头CSB40R等构成超声波接收电路模块[7],电路如图4所示。

图4 超声波接收电路Fig 4 Ultrasonic receiver circuit
2.3显示电路模块
显示模块主要使用LCD1602液晶显示模块,LCD1602是专门用来显示字母、数字、符号的液晶显示模块,具有体积小、功耗低、可靠性高等特点。
2.4报警电路模块
声光报警电路由一个蜂鸣器、一个发光二极管和其他外围电路组成,电路如图6所示。开始倒车时,驾驶员可以根据实际路况对报警距离进行设定,当汽车与障碍物之间的距离小于预设的距离值时,单片机PA8口将输出低电平,此时报警电路被导通,蜂鸣器和发光二极管同时出现声光报警提醒驾驶员,防止倒车事故发生。
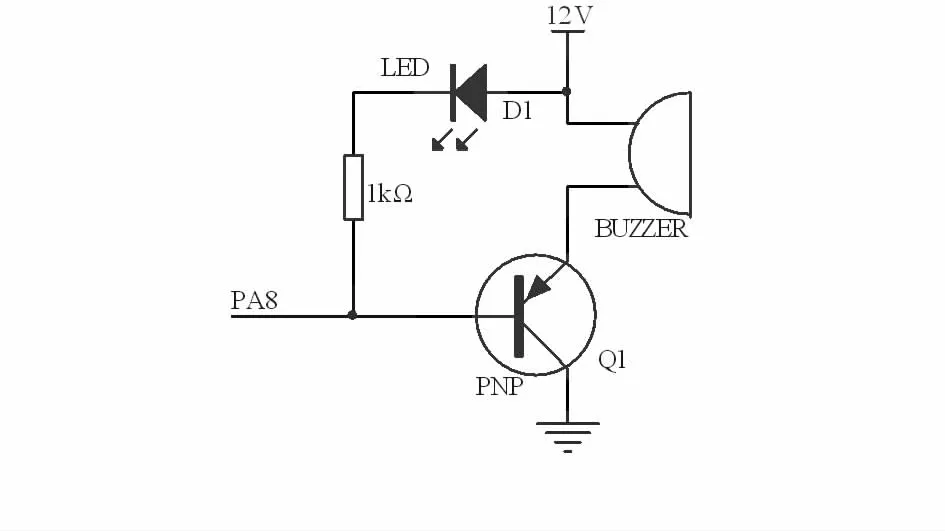
图5 声光报警电路Fig 5 Circuit of audible and visual alarm
3系统软件设计
3.1超声波测距原理
超声波是指频率高于20kHz的声波。常用的测距方法主要有:超声波幅值检测法、相位检测法以及渡越时间检测法[8]。其中超声波幅值检测法容易受外界环境的影响,从而无法测得精确的距离;超声波相位检测法的精确度比较高,但是检测的距离范围较小。因此,本系统采用超声波渡越时间检测法,此方法具有实现起来简单、成本低、可应用的距离范围大等优点。
本系统的超声波渡越时间检测法工作原理[9]是:从单片机发出一串脉冲方波信号开始计数,经过超声波发射器发出超声波,超声波传播到障碍物表面后反射回到超声波接收端,回波信号被单片机检测到时停止计数[10],可以得到超声波在空气中传播的往返时间Δt。若单片机的机器周期为T0,那么汽车距离障碍物的距离D表示为
式中T0为单片机的机器周期,N为单片机计数的脉冲数量,V为超声波的传播速度。
3.2系统主程序设计
系统的工作流程大致如下:先对系统初始化设置;然后发射超声波,同时打开计数器开始计数,当接收到超声波时,开外部中断并且关闭计数器;温度测量模块测出环境温度,根据测得的温度值计算出超声波的传播速度,再计算出汽车与障碍物之间的距离;最后设置报警距离,当汽车与障碍物之间的距离小于报警距离时,该系统会发出声光报警提醒驾驶员,以确保倒车安全。具体的系统主程序流程图设计如图6所示。
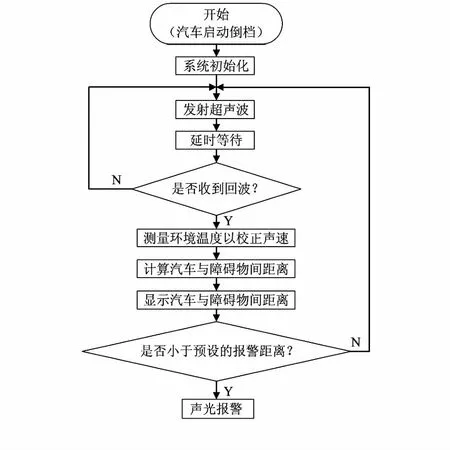
图6 系统主程序流程图Fig 6 Main program flow chart of system
3.3系统中断服务程序设计
本系统对超声波往返时间的计数是通过单片机的PB9端口的外部中断功能实现。当启动倒车时,该倒车雷达预警系统进入定时器中断服务子程序,即通过单片机的PB10端口输出频率为40kHz的脉冲方波信号,同时打开定时器开始计时计数。一旦超声波接收电路检测到回波信号时,便触发PB9端口产生外部中断信号,并且将外部中断信号送给单片机,单片机即可进入外部中断服务程序,同时关闭定时器。其定时器中断服务子程序流程图如图7(a)所示、外部中断服务子程序流程图如图7(b)所示。

图7 中断服务流程图Fig 7 Flow chart of interrupt service
4实验与结果分析
本文提出的倒车雷达预警系统的基础是超声波测距,测距精度直接决定了系统的性能。因此,本文在一个停车场对该系统进行实验测试,并对实验结果进行分析。
系统设计考虑到了气温随时间变化,对测距准确度的影响,因此,实验固定汽车与障碍物之间的距离为280cm,选择一天中的3个时间点,对应不同的气温,分别对测距准确度进行测试。如表1所示。

表1 有温度补偿与无温度补偿测试值对比
在倒车中,车辆与障碍物的位置是在变化的,因此系统需要在不同位置上具有良好的测距精度。本组实验,测试时间为中午12时,温度为13 ℃,测试汽车在不同位置处实验测量距离的结果。实验结果如表2所示,在不同的距离上,系统测距与实际距离的误差并没有明显的变化,最大平均误差不超过3%,在各距离上达到了设计目标。

表2 距离测量值与实际值对比
系统的报警机制是提醒驾驶员确保倒车安全的重要保证,为了满足不同场景的需求,系统的报警距离可以进行设置。本组实验测试系统的报警灵敏度。实验选择200,300,400cm三个距离,并且对于每一个距离,分别设置50,100,150cm三个报警距离进行实验测试,实验结果如表3所示,系统能够在预设的报警距离处及时触发报警,提醒驾驶员注意安全,达到指示倒车的目的。
5结束语
本文通过采用单片机控制和超声波测距,设计出一种经济实用、结构简单和可靠性高的倒车雷达预警系统。可以实时显示汽车与障碍物之间的距离,并且在报警距离内发出声光报警。实验结果表明:在不同的距离上,最大平均误差不超过3 %,并且能够在预设的报警距离处及时发出声光报警,提醒驾驶员,达到指示倒车的目的。
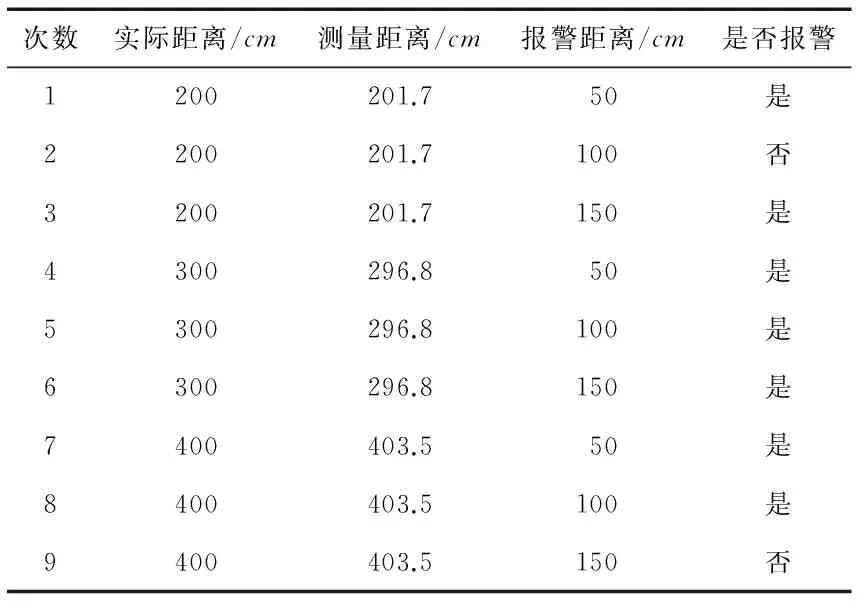
表3 不同报警距离测试
参考文献:
[1]PaulG.Parkingcrashesandparkingassistancesystemdesign:Evidencefromcrashdatabases,theliterature,andinsuranceagentinterviews[C]∥SEAWorldCongress,2006:1685-1697.
[2]杨旺喜,茅嘉伟,沈明明,等.基于单片机的超声波倒车雷达系统设计[J].科技信息,2014(9):12-13.
[3]张欣,冯雷,姜长坤.具有语音提示功能的超声波倒车雷达系统的设计[J].长春工程学院学报:自然科学版,2014,15(4):29-32.
[4]张嘉琪,冀大选,李杰一,等.基于LabVIEW平台的电子鼻系统设计[J].传感器与微系统,2015,34(5):92-94.
[5]TsuchiyaS,YamadaH,MutoT.Aprecisiondrivingsystemcomposedofahydrauliccylinderandhighspeedon/offvalves[J].FluidPowerJournal,2001,8(6):34-36.
[6]韩军,常瑞丽.智能移动机器人超声波测距定位系统的研究[J].机械设计与制造,2010(8):164-166.
[7]唐阳山,杨培菲,邱瑞,等.基于AT89S52汽车倒车防撞预警系统的设计[J].辽宁工业大学学报:自然科学版,2013,33(6):383-386.
[8]Kazanavi′ciusE,VenterisR.ImplementationofDSPalgorithmsforultrasonicmeasurementapplications[J].Ultragarsas,1999,2(32):32-35.
[9]张剑,王维,何俊峰,等.基于双超声波模块的新型定位方法[J].传感器与微系统,2012,31(9):22-24.
[10] 黄韬.超声测距倒车雷达及其车载CAN总线智能节点研究[D].合肥:安徽大学,2010:13-15.
DesignofcarreversingradarwarningsystembasedonSTM32andultrasonicwaveranging*
HANRen1,JINYong-wei1,WANGQiang2
(1.SchoolofOptical-ElectricalandComputerEngineering,UniversityofShanghaiforScienceandTechnology,Shanghai200093,China;2.SchoolofSoftware,HenanUniversity,Kaifeng475000,China)
Abstract:Aiming at status that most compact cars and trucks are lack of reversing radar due to cost constraints,design a low-cost simple structure reversing radar warning system with high reliability.Hardware design consists of ultrasonic wave distance measurement circuit,LCD display circuit,alarm circuit.Software design consists of introduction of ultrasonic ranging principle and workflow of software system.In the process of reversing,the system can detect distance between car and obstacle and display distance on LCD in real time.Once the distance exceeds the preset warning threshold,the audible and visual alarm will be triggered to warn the driver.Experimental results show that the proposed system can achieve correct ranging value of the distance and the maximum average error is not exceed 3 %,the system is also characterized by lower energy consumption and well performance.
Key words:ultrasonic distance measurement; reversing radar; MCU; LCD; audible and visual alarm
DOI:10.13873/J.1000—9787(2016)04—0063—04
收稿日期:2016—02—24
*基金项目:河南省教育厅科学技术研究重点项目(14B520022);河南省科技发展计划资助项目(142102210396)
中图分类号:TP 277
文献标识码:A
文章编号:1000—9787(2016)04—0063—04
作者简介:
韩韧(1980-),男,湖北武汉人,博士,讲师,主要研究方向为无线网络、认知无线电网络、嵌入式系统应用。
王强,通讯作者,E—mail:wangqiang197909@163.com。
猜你喜欢
消费电子(2022年7期)2022-10-31
中国交通信息化(2022年3期)2022-06-01
通信电源技术(2020年11期)2020-09-07
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
现代电子技术(2018年14期)2018-07-27
电子技术与软件工程(2016年23期)2017-03-06
通信电源技术(2016年4期)2016-04-04
