
边缘标线影响跟车车距调节行为的结构方程模型
2016-06-24 05:26丁乃侃朱顺应焦泥沙
东南大学学报(自然科学版) 2016年3期
丁乃侃 朱顺应 王 红 焦泥沙
(1武汉理工大学交通学院, 武汉 430063)(2湖北省交通运输厅规划研究室, 武汉 430030)
边缘标线影响跟车车距调节行为的结构方程模型
丁乃侃1朱顺应1王红1焦泥沙2
(1武汉理工大学交通学院, 武汉 430063)(2湖北省交通运输厅规划研究室, 武汉 430030)
摘要:从驾驶员距离感知、速度感知以及碰撞估计等视知觉角度,研究了边缘标线对驾驶员跟车车距调节行为的影响.通过开展路上试验,采集真实车流数据,运用结构方程模型探索了多个因素影响跟车行为的交互因果关系.结果显示:边缘标线铺设角度、前车车型、时间频率以及碰撞时间均能显著增大跟车车头间距;这些因素引起的车头间距增大可能是由于它们会导致跟车减速度绝对值的增大(实际值减小);距离因素可以引起更强烈的危险性感知,并呈现为更显著的车头间距变化.本研究为减少追尾碰撞事故和提高道路交通安全水平提供了一种新的方法.
关键词:交通工程;跟车行为;路上试验;边缘标线;结构方程模型;车头间距
跟车是一种重要的交通运行状态,它要求驾驶员对速度和车距及时做出判断和调节.与跟车密切相关的追尾碰撞事故是最常见的事故形态之一,2010年我国追尾碰撞事故占比达到40.4%[1].研究表明,跟车过紧(车距较小)是导致追尾碰撞的主要原因.利用边缘标线对驾驶员进行视觉干预,已成为被广泛采纳的安全改善措施.
边缘标线包含了边缘率信息,它被定义为邻近地表不连续纹理穿过观察者视野固定参考点的频率[2].边缘率本质上是时间频率,即刺激物在单位时间内呈现的周期数,时间频率的增大将引起驾驶员感知速度的增大,并导致危险性感知的提升.Rakha等[3]和Retting等[4]分别在平直路段和公路出口匝道上进行了试验,均发现铺设边缘标线后试验路段车辆平均速度呈现下降.
此外,视觉信息同样影响制动和距离调节行为.Anstis[5]将边缘标线以与行车方向成一定角度的形式等间距地布设在车道两侧,发现驾驶员感受到车道两侧的分界线呈收缩的态势,即佐尔拉错觉.朱顺应等[6]认为该铺设角度越大可以导致更显著的减速效果.事实上,在三维空间中,当观察者向前方看时,其观察到的是深度.观察者对深度的感知和判断依赖深度线索,如线条透视等.佐尔拉错觉可能影响了线条透视,进而导致深度感知的改变.
另外,前方物体大小信息也影响了跟车距离.Jiang等[7]通过实地试验研究发现,被试者跟随小型客车的间距小于跟随其他车型.Yilmaz等[8]认为由物体大小和距离决定的视角扩张率信息影响了驾驶员对距离的判断.丁乃侃等[9]通过路上试验研究认为,车型和时间频率协同影响跟车车距.
已有研究从不同的角度考察了边缘标线对车速或车距的影响,但仍然缺乏各因素对跟车车距调节的交互作用的探索.结构方程模型(SEM)适于研究多个不可直接测量的因素之间的复杂交互因果关系[10].因此,本研究拟建立边缘标线影响跟车车距调节行为的结构方程模型.
1试验及数据采集
1.1试验方法概述
本研究主要以边缘标线铺设的角度(标线与行车方向形成的夹角)、前车车型为控制性因素,在高速公路上开展路上试验.角度分别选择了30°,45°,135°和150°四种情形;车型则划分为小客车、大客车、小货车以及大货车.同时,考虑时间频率和碰撞时间(TTC)[11]对跟车行为的影响.其中,时间频率考虑驾驶员的敏感频率[12],选择边缘标线的单个周期长度(即单根标线长度及其相邻间隙之和,记作λ)为2m.根据定义,时间频率可根据下式计算:
(1)
式中,ft为时间频率(即边缘率),Hz;L为标线铺设的总长度,m;Δt为车辆经过标线铺设起点、终点断面的时间间隔,s.根据试验路段前期观测的车速分布特征,时间频率处于[4,14]Hz.
碰撞时间Tc是观察者与物体接触前剩余的时间,也可以表示为观察者与靠近物体之间的距离和物体靠近速度的比值.对于跟车情形,碰撞时间可由下式计算:
(2)
式中,ΔD为前车车尾与后车车头的间距,m;ΔV为前后车相对速度,m/s.可看出跟车行驶过程中,Tc值越大,车辆行驶越安全.
为分析以上因素对跟车车距的影响,路上试验采集每辆车通过多个连续断面的车速、时刻和车辆类型数据.
1.2试验地点及标线布设方案
本研究选择沪渝高速(编号G50)宜昌至长阳段中的K1220+200~K1221+100段作为试验路段.该路段为平直线路段,双向四车道通行,车道宽度为3.75m,设计速度80km/h.试验路段前后300m范围内无隧道、立交等构筑物且无任何违章抓拍设备.
试验时选用背胶式黄色反光标线带铺设在行车道原有白色标线内侧,铺设总长为300m,且该300m的实际铺设区域位于上述试验路段的中间.在30°,45°,135°和150°四种铺设形式的试验中,标线的宽度均为15cm,标线的两端距离相邻白色标线的垂直距离均分别保持为15和60cm,相邻2根标线的间距为2m.边缘标线的具体布设方案如图1所示.
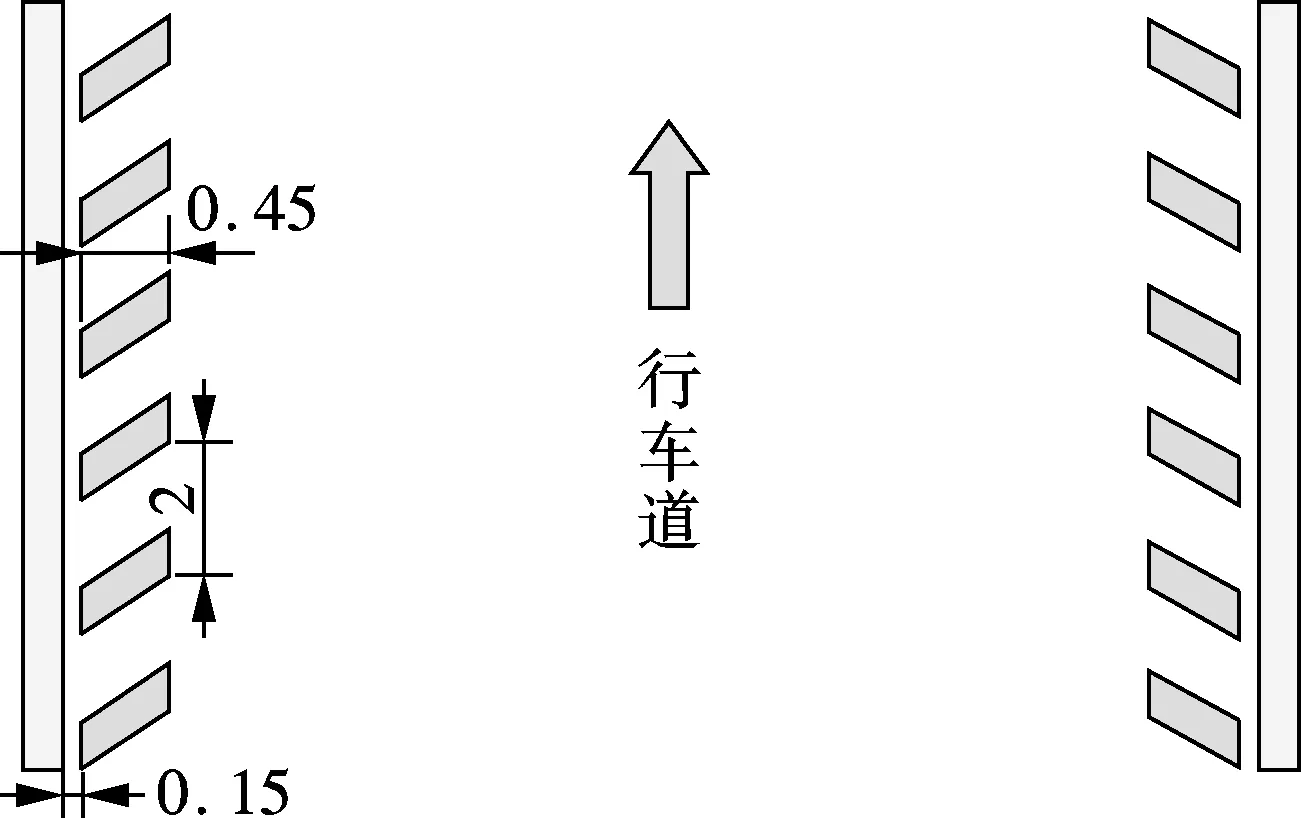
(a) 标线布设示意(单位:m)

(b) 标线布设实景
1.3数据采集
试验中,按照车流行进方向,将6个NC200型交通流分析仪依次间隔100m安置在行车道的中央,以采集对应的6个断面处的车速、车型以及车头时距,如图2所示,图中编号①~⑥代表6个不同的观测断面.为了提高数据的有效性,使用6台摄像机辅助拍摄6个观测断面处的车流,且摄像机的系统时间与NC200分析仪保持一致.另外,观测过程中采用雷达枪人工采样记录的方法来校核NC200采集的数据,若出现显著性偏差则重新观测.本试验将边缘标线铺设的角度、前车车型作为控制因素,分别开展了30°,45°,135°和150°四种铺设角度下的试验观测和数据采集工作.根据数据分析样本量的需求,4次试验观测各维持1~2d不等.另外,为消除天气等其他外在因素的影响,试验观测均在晴朗白天进行.
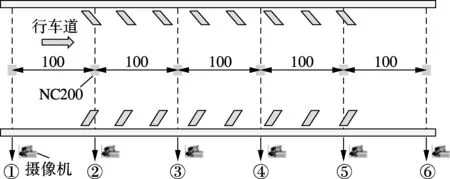
图2 NC200交通流分析仪设置示意图(单位:m)
1.4数据处理
1.4.1过滤自由流车辆
由于本研究仅考查跟车车辆,因此需要剔除自由流状态下的车辆.此处采用与刘兵等[13]类似的车辆剔除方法,即如果车辆经过断面的车头时距大于其瞬时停车时间,则该车被判定为自由流车辆,并从分析样本中剔除.停车时间由停车视距[14]计算得到,即
(3)
1.4.2过滤中途变道车辆
车辆中途变道表明其没有依次连续跨过6个NC200分析仪,进而导致数据失真.为了排除该类错误数据,采用人工判读拍摄的车流视频来筛查变道车辆.若在任一断面出现变道,则剔除该变道车辆.
2跟车车距调节行为的结构方程模型
2.1模型构建
根据已有研究,本文将角度、前车车型、时间频率和碰撞指数(定义为碰撞时间的倒数,即1/Tc)作为观测变量(观测指标),其对应的外生潜变量分别为深度感知(此处深度感知沿用了视知觉领域的表述,但由于本研究针对跟车情形,因此在实际意义上,此处跟车驾驶员的深度感知可等同于其对前方车辆间距的感知,即距离感知)、大小感知、边缘率感知和碰撞估计;同时,上述4个外生潜变量又对应于距离危险性感知、速度危险性感知和碰撞危险性感知这3个内生潜变量.4个观测变量是潜变量发生的原因,因此采用形成性测量模型(formativemodel)建立结构方程.边缘标线对驾驶员车距调节行为的影响以车头间距增量和减速度作为度量指标.此处车头间距增量由下式计算:
离衢州不远的南北群山,四十九军王铁汉部,七十四军王耀武部早已布下重兵,只等日军合围衢州,再来个南北夹击反包围,到那时,他陈颐磊的八十六军将来个中心开花,聚歼日军从华东、华北拼凑而来的十万骄兵。
ΔH=H5-H1
(4)
式中,ΔH为车头间距增量,m;H1,H5分别为车辆经过观测断面①和断面⑤时的车头间距,m.
减速度根据下式计算:
(5)
式中,d为减速度,m/s2;v1和v5分别为车辆经过断面①和断面⑤时的瞬时速度,km/h;t1和t5分别为车辆经过断面①和断面⑤的时刻,s.另外,根据观测数据,铺设边缘标线后车辆在试验路段总体呈减速行驶状态,故减速度为负值,即d<0.
表1描述了潜变量和对应观测变量的设置情况.

表1 模型变量设置
2.2模型标定
每组试验选取断面1~5的观测数据作为评价参考数据,同时随机选取574条车辆数据作为分析样本.利用AMOS20.0建立驾驶员跟车车距调节行为的SEM,并对模型进行迭代计算和修正,得到修正后模型的标准化估计结果(见图3).图中,X为形成性指标,Y为反映性指标,ξ和η为潜变量,δ,γ和ε为误差项.
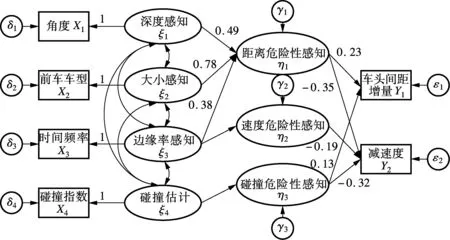
图3 SEM标准化估计结果
根据以上估计结果,可将模型表达为
(6)
(8)
式(6)为外生潜变量ξ和形成性指标X之间的量化关系;式(7)为内生潜变量η与外生潜变量ξ之间的量化关系;式(8)为内生潜变量η与反应性指标Y之间的量化关系.
2.3模型拟合度检验
拟合程度是评判所建立的SEM是否能够较好地反映数据本身蕴含的因果关系或规律的重要指标.通常采用的基本指标有规范卡方(χ2/df)、拟合优度指数(GFI)和近似误差均方根(RMSEA).此外,还可以使用其他指标,如调整后适配度指数(AGFI)、规范拟合指数(NFI)、增值拟合指数(IFI)以及比较拟合指数(CFI)等.本文模型拟合指标结果如表2所示.

表2 SEM模型拟合指标及其检验
由表2可看出,除RMSEA指标(RMSEA<0.08,良好拟合)外,其余6项指标均呈现为完全拟合,即说明模型总体拟合程度较高.
3讨论与分析
3.1单因素对跟车车距调节的影响
根据式(1)~(3),可分别得到模型中外生潜变量与内生潜变量的反应性指标的标准量化关系:
Y1=(0.23×0.49×ξ1)+(0.23×0.78×ξ2)+
(0.23×0.38×ξ3)+(0.13×1.00×ξ4)+E1
Y2=(-0.35×0.49×ξ1)+(-0.35×0.78×ξ2)+
(-0.35×0.38-0.19×1.00)×ξ3+
(-0.32×1.00×ξ4)+E2
式中,E1,E2为合成后的误差项.
由计算可知: 深度感知、大小感知、边缘率感知以及碰撞估计对车头间距增量的标准化路径系数分别为0.11, 0.18, 0.09, 0.13;对减速度的标准化路径系数分别为-0.17,-0.27,-0.32,-0.32.
可发现,深度感知、大小感知、边缘率感知以及碰撞估计对车头间距均呈现为正向作用,而对减速度则均为负向作用.另外,从观测变量与反应性指标的关系来看,当铺设角度、前车车型、时间频率以及碰撞指数增大时,可以在试验路段断面5处观测到更大的车头间距.具体而言,从铺设角度来看,以150°铺设的标线可以导致最大的车头间距增量,这是因为相对于30°, 45°和135°的标线,150°的标线可使驾驶员感受到最强烈的车道收缩效果,即引起最显著的深度感知变化.从前车车型来看,在标线铺设角度一定的情况下,当前方为大型车时,跟车车辆的车头间距增量最大;前方为货车时的车头间距增量大于前方为客车时的情形.同样地,在铺设角度及前方车型一定的情况下,时间频率或碰撞指数越大,最终观测到的车头间距增量也越大.这种影响现象与佐尔纳错觉对制动行为的影响[5-6]以及大小信息、边缘率信息对制动和车距控制行为的影响是一致的[9,11].车头间距出现增大可能是由于上述因素导致减速度绝对值增大(实际数值减小).以上影响作用的研究将为基于边缘标线的跟车安全防控措施的实施提供一定的设计参考.
3.2多因素对跟车车距调节的综合影响
结合图3和3.1节中关于单因素的影响分析,可看出:
1) 驾驶员深度感知、大小感知和边缘率感知协同增强其距离危险性感知,并提高了驾驶员对速度和车头间距的控制水平,表现为车头间距的增大.此外,碰撞危险性感知同样影响车头间距,且与深度感知等表现出同样的正向作用.但另一方面,角度、前车车型以及时间频率对车头间距增量的标准化路径系数之和为0.38,而碰撞指数对车头间距增量的标准化路径系数为0.13,这表明距离危险性感知较碰撞危险性感知引起的车头间距增大效果更强.
2) 距离危险性感知、速度危险性感知以及碰撞危险性感知均对减速度产生直接的影响,且呈现为对减速度绝对值的协同增大作用.其中,距离危险性感知影响减速度的标准化路径系数之和为-0.58,而速度危险性感知和碰撞危险性感知影响减速度的标准化路径系数之和分别为-0.32和-0.19.可见,距离危险性感知可以导致更强烈的跟车安全性反馈,即采取更大制动力以避免碰撞的发生,并最终表现为更显著的车头间距变化.
4结论
1) 边缘标线铺设角度、前车车型、时间频率以及碰撞指数均显著影响跟车车头间距.
2) 各因素在导致减速度绝对值增大(实际值减小)的同时引起车头间距的增大.
3) 对比距离、速度以及碰撞所引起的危险性感知发现,距离因素能够引起更强烈的危险性感知,并导致更大的减速度绝对值,进而表现出更显著的车头间距变化.
4) 在保证边缘率(时间频率)充分体现的前提下,应当从多个角度、多个方面来寻求边缘标线布设形式的优化设计,以更好地良性影响车距调节行为.
边缘标线对跟车车距调节行为的影响涉及多方面、多维度因素.除角度、车型大小、时间频率外还存在其他因素的影响,如标线的颜色、驾驶员年龄、性别以及昼夜的差别等,其复杂影响机制有待进一步探索和解析.
参考文献 (References)
[1]交通管理局.2011年道路交通事故白皮书[R].北京:中华人民共和国公安部交通管理局,2011.
[2]WarrenR.Opticaltransformationsduringmovement:Reviewoftheopticalconcomitantsofegospeed[R].Columbus,OH,USA:DepartmentofPsychology,OhioStateUniversity, 1982.
[3]RakhaHA,KatzBJ,DukeD.Designandevaluationofperipheraltransversebarstoreducevehiclespeed[C]//TRB 85th Annual Meeting.Washington,DC,USA, 2006: 06-0577.
[4]RettingRA,McGeeHW,FarmerCM.Influenceofexperimentalpavementmarkingsonurbanfreewayexit-ramptrafficspeeds[J]. Transportation Research Record: Journal of the Transportation Research Board, 2000, 1705: 116-121.DOI:10.3141/1705-17.
[5]AnstisS.Movingobjectsappeartoslowdownatlowcontrasts[J]. Neural Networks, 2003, 16(5/6): 933-938.DOI:10.1016/S0893-6080(03)00111-4.
[6]朱顺应,张子培,王红,等.路面边缘率标线减速效果的影响机理[J].中国安全科学学报,2013,23(6):110-115.
ZhuShunying,ZhangZipei,WangHong,etal.Mechanismresponsibleforvelocityreductionbyedgeratebars[J]. China Safety Science Journal, 2013, 23(6): 110-115. (inChinese)
[7]JiangJ,LuJ,LüZ.Car-followingbehaviorofdifferentvehiclesonordinaryhighways[C]//Proceedings of International Conference of Chinese Transportation Professionals 2011.Nanjing,China, 2011: 1822-1831.
[8]YilmazEH,WarrenWH.Visualcontrolofbraking:Atestofthetauhypothesis[J]. Journal of Experimental Psychology: Human Perception and Performance, 1995, 21(5): 996-1014.
[9]丁乃侃,朱顺应,张恒,等.车型与时间频率对跟车车头时距的影响研究[J].中国安全科学学报,2014,24(10):120-125.
DingNaikan,ZhuShunying,ZhangHeng,etal.Effectsofvehiclesizeandtemporalfrequencyonfollowingtimeheadway[J]. China Safety Science Journal, 2014, 24(10): 120-125. (inChinese)
[10]程龙,陈学武.基于结构方程的城市低收入通勤者活动出行行为模型[J].东南大学学报(自然科学版),2015,45(5):1013-1019.DOI:10.3969/j.issn.1001-0505.2015.05.034.
ChengLong,ChenXuewu.Activity-travelbehaviormodelofurbanlow-incomecommutersbasedonstructuralequation[J]. Journal of Southeast University (Natural Science Edition), 2015, 45(5): 1013-1019.DOI:10.3969/j.issn.1001-0505.2015.05.034.(inChinese)
[11]MinderhoudMM,BovyPH.Extendedtime-to-collisionmeasuresforroadtrafficsafetyassessment[J]. Accident Analysis and Prevention, 2001, 33(1): 89-97.
[12]LiuB,ZhuSY,WangH,etal.Designtheoryforspeedcontrolbyusingconstantedgerate[C]//Proceeding of International Conference of Chinese Transportation Professionals 2009.Harbin,China, 2009: 419-424.
[13]刘兵,朱顺应,王红,等.边缘率标线长度对减速行为的影响现象和机理研究[J].中国安全科学学报,2013,23(10):114-120.
LiuBing,ZhuShunying,WangHong,etal.Researchonspeedreductionphenomenonandmechanisminfluencedbylengthofedgeratebars[J]. China Safety Science Journal, 2013, 23(10): 114-120. (inChinese)
[14]中华人民共和国交通部.JTGB01—2003公路工程技术标准[S].北京:人民交通出版社,2005.
Structuralequationmodelofedgelinemarkingsinfluencingdistanceheadwayadjustingbehaviorincar-following
DingNaikan1ZhuShunying1WangHong1JiaoNisha2
(1SchoolofTransportation,WuhanUniversityofTechnology,Wuhan430063,China) (2PlanningandResearchStudio,DepartmentofTransportationofHubeiProvince,Wuhan430030,China)
Abstract:The effects of edge line markings on drivers’ adjusting behavior of the distance headway were studied, from the perspective of visual perception like distance perception, speed perception, and collision estimation. Naturalistic vehicle flow data was collected from on-road field observations. Based on the data, the interactive causal relationship of various factors that influence car-following behavior was explored with a structural equation model (SEM). The results show that the installation angle of edge line markings, the type of leading vehicle, time frequency, and time-to-collision (TTC) can significantly enlarge the following distance headway. The enlargement in distance headway due to these factors can be attributed to the increase of the absolute deceleration (decrease of the actual deceleration) of following vehicles. The distance-related factors can induce a stronger perception of risk, which eventually brings out the most significant changes in distance headway. This study provides a new method for reducing rear-end collisions to improve traffic safety.
Key words:traffic engineering; car-following behavior; on-road experiment; edge line markings; structural equation model; distance headway
DOI:10.3969/j.issn.1001-0505.2016.03.030
收稿日期:2015-10-22.
作者简介:丁乃侃(1989—),男,博士生;朱顺应(联系人),男,博士,教授,博士生导师,zhusy2001@163.com.
基金项目:国家自然科学基金资助项目(51078299,50778142)、贵州省交通运输厅科技资助项目(2012-122-016).
中图分类号:U491
文献标志码:A
文章编号:1001-0505(2016)03-0635-06
引用本文: 丁乃侃,朱顺应,王红,等.边缘标线影响跟车车距调节行为的结构方程模型[J].东南大学学报(自然科学版),2016,46(3):635-640.DOI:10.3969/j.issn.1001-0505.2016.03.030.
猜你喜欢
现代商贸工业(2016年24期)2017-01-13
高教探索(2016年12期)2017-01-09
财经问题研究(2016年7期)2016-12-26
软件导刊(2016年9期)2016-11-07
科学与财富(2016年28期)2016-10-14
商业经济研究(2016年14期)2016-09-14
