
Inpho和MapMatrix在无人机遥感数据处理中的对比研究
2016-06-23 03:01汪思梦朱大明王德智杨永明
安徽农业科学 2016年11期
汪思梦,朱大明*,王德智,杨永明
(1.昆明理工大学国土资源工程学院,云南昆明 650093;2.中国地质大学(武汉)信息工程学院,湖北武汉 430074)
Inpho和MapMatrix在无人机遥感数据处理中的对比研究
汪思梦1,朱大明1*,王德智2,杨永明1
(1.昆明理工大学国土资源工程学院,云南昆明 650093;2.中国地质大学(武汉)信息工程学院,湖北武汉 430074)
摘要介绍了2款著名的摄影测量系统——国外的Inpho和国内的MapMatrix系统(含MapMatrix、DATMatrix和EPT)在无人机遥感影像处理中的流程、软件特点和优势,并以资阳市雁江区1∶1 000无人机航空摄影中某一块数据进行试验,对比分析两款系统实际处理流程和精度。主要结论如下:①Inpho和MapMatrix系统在处理1∶1 000无人机遥感数据时,空中三角测量精度和DOM成图精度、影像质量均能达到国标要求,两者平面精度相差不大,高程精度Inpho相对较好;②Inpho系统软件集成性高、操作性好,空中三角测量性能强、自动化程度高,MapMatrix系统需要调用PATB,处理数据量和效率没有Inpho高,需要人工编辑大量争议点;③MapMatrix在镶嵌成图和编辑方面更加便捷、高效。
关键词无人机遥感;DOM;Inpho;MapMatrix;空中三角测量
无人机遥感(UAV-RS)是利用先进的无人驾驶飞行技术、遥感传感器技术、遥测遥控技术、通信技术、IMU定位定姿技术、GNSS定位技术和遥感应用技术,具有自动化、智能化、专业化快速获取国土、资源、环境、事件等空间遥感信息,并进行处理、建模和分析的先进新兴航空遥感技术解决方案[1-2]。无人机遥感系统由无人机飞行平台、飞行控制系统、地面监控系统和数据处理与应用分析系统组成。无人机遥感具有低成本、可重复使用、灵活机动、高时效、分辨率高等特点,正逐步成为卫星遥感、有人机遥感和地面遥感的有效补充,给遥感技术提供了新的平台[3-4]。
无人机遥感由于使用质量较轻的无人机飞行平台,不同于传统航空摄影测量,其获取的数据易受到气候、任务载荷、相机质量等因素的影响,导致飞机姿态不稳定,获取的影像质量会有些不足,如影像重叠度不规则、相幅小、像片数量多、影像倾斜角和旋偏角过大、影像有明显畸变等[7]。因此,数据处理一直是无人机遥感研究中的热点问题。目前,常用的商业无人机遥感数据软件主要有,国外的Inpho[8]、像素工厂[9]、LPS[10]、IPS[11]、Pix4D mapper[12]、Image Station[13],国内的JX4[14]、MapMatrix[15]、VirtuoZo[16]、DPGrid[17]、PixleGrid[5]、GeoWay CIPS[18]等,以上软件都有学者进行了相关实践和研究。其中,Inpho是欧洲市场上空中三角测量和正射处理占有份额最大的软件,MapMatrix是国内成长最快的数字摄影测量系统。笔者以Inpho和MapMatrix这2款数字摄影测量系统为平台,介绍、对比了2款软件在无人机遥感数据制作DOM方面的处理流程及关键技术,并验证、对比了2款软件的实际生产能力和影像处理精度,以期丰富无人机遥感数据处理实践研究,为无人机遥感数据处理者在软件选择和综合应用上提供参考。
1Inpho和MapMatrix系统简介
Inpho摄影测量系统是欧洲最著名的航空摄影测量与遥感处理软件之一,是德国Inpho公司的核心产品,可以全面系统地处理航测遥感、激光、雷达等数据,其空中三角测量软件和正射处理软件在欧洲占有的市场份额最大。Inpho5.7摄影测量系统由9个模块组成:Applications Master基础平台、Match-AT自动空中三角测量、inBLOCK测区平差、Match-T DSM自动提取地形地表模块、DTMaster DTM/LIDAR编辑软件、OrthoMaster正射纠正、OrthoVista镶嵌拼接、SCOP++高效管理DTM、Summit Evolution摄影测绘立体处理工作站。
MapMatrix系统(含MapMatrix4.1、EPT2.0、DATMatrix2.0)是由武汉航天远景公司研发的新型数字摄影测量系统,与传统的数字摄影测量工作站相比,具备作业过程自动化、采编入库一体化、数据处理海量化等优势。MapMatrix4.1是摄影测量数据处理基础平台,可立体环境下采编入库;EPT2.0是正射影像生产软件,主要用于影像匀光匀色、正射影像生成、编辑等;DATMatrix2.0是空中三角测量软件,集成了PATB光束法区域网平差模块。
2Inpho和MapMatrix数据处理流程
2.1Inpho处理流程Inpho系统无人机遥感数据处理流程见图1。
(1)原始数据准备,主要包括原始像片、POS数据、相机检校参数、控制点资料。
(2)数据预处理,需要对像片进行匀光、畸变处理和旋转,以及文件格式整理等。
(3)自动空中三角测量,在Applications Master中新建工程,需要依次进行定义相机、添加像片、导入POS数据、导入控制点和设置航带,然后使用Match-AT进行连接点自动提取和区域网平差,接着进行像控点和检查点量测,最后进行光束法区域网整体平差和争议点编辑,完成空中三角测量。
(4)DEM生成,在Match-T DSM中生成DTM,在DTMaster中编辑DTM使其与实际地形一致,达到精度要求。
(5)在OrthoMaster中结合生成的DEM进行单张像片正射纠正,在OrthoVista中利用纠正后的像片智能镶嵌出整个测区的初始DOM,检查、编辑DOM及其镶嵌线,自动分幅后,即可完成DOM制作。
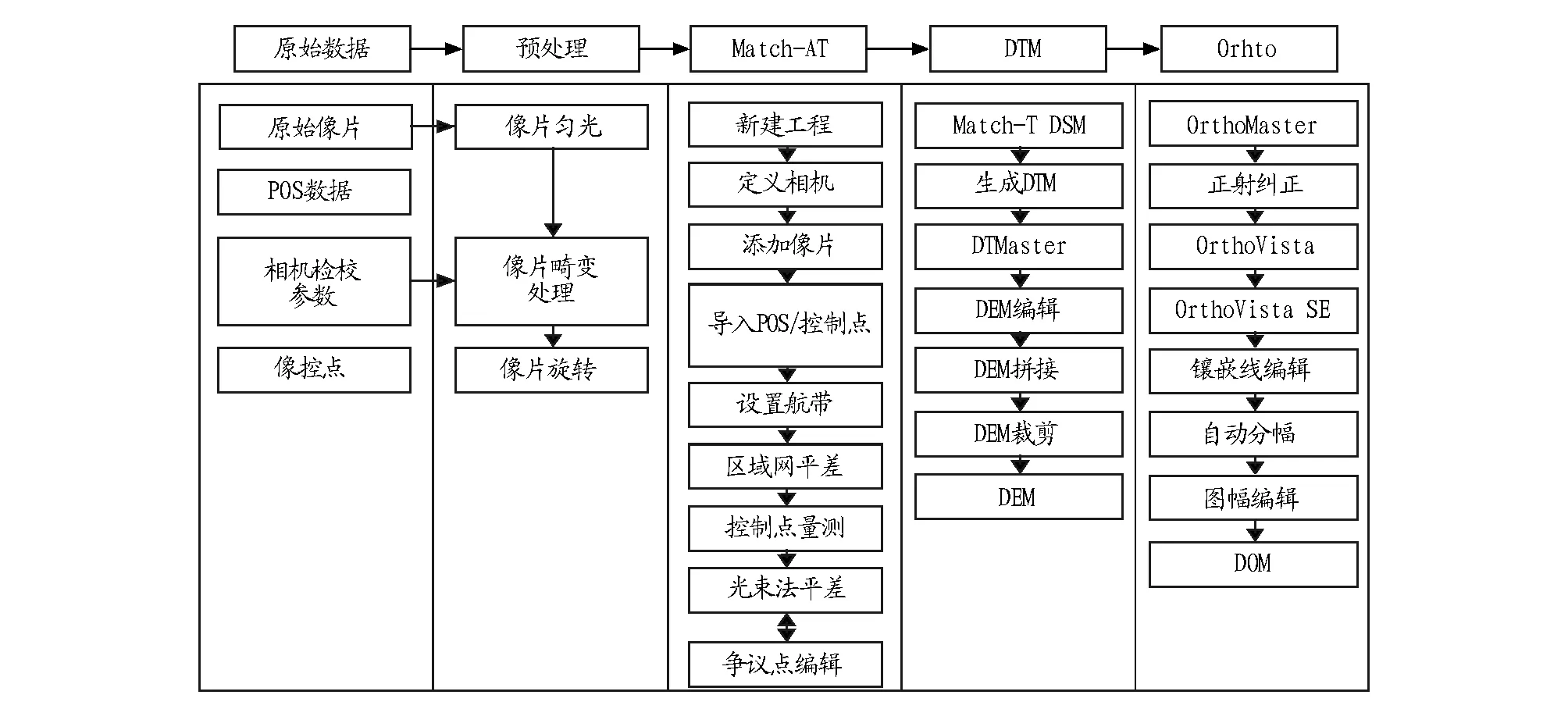
图1 Inpho系统无人机遥感数据处理流程Fig.1 Processing flow of Inpho in UAV remote sensing data
2.2MapMatrix处理流程MapMatrix系统无人机遥感数据处理流见图2。
(1)原始数据准备,同Inpho。
(2)数据预处理,同Inpho。
(3)DatMatrix中自动空中三角测量,首先新建工程,定义或导入相机文件,设置航带、添加影像,进行内定向,接着空中三角测量自动转点,然后进行像控点和检查点量测,再调用PATB进行空中三角测量平差,会产生许多争议点,因此需要编辑争议点,反复调用PATB进行空中三角测量平差,直至争议点消除、平差结果符合测图精度要求,最后导出XML文件。
(4)MapMatrix中生成DEM,导入DATMatrix中导出的XML文件和相机文件,对影像进行数码量测相机内定向,对整个工程创建立体像对,再全区匹配自动生成初始DEM文件,在此基础上内插等高线,并进行DEM立体环境编辑、裁剪、拼接工作,完成DEM制作。
(5)EPT中DOM制作,首先新建“匀/纠/拼工程”进行单片纠正,然后划分图幅、镶嵌成图,编辑镶嵌线和影像,完成测区DOM制作。
3Inpho和MapMatrix无人机遥感数据处理对比
3.1研究数据使用2015年四川省资阳市雁江区农村土地承包经营权确权登记1∶1 000无人机航空摄影中某一块数据进行试验,试验区位于104°41′30″~104°42′40″E、30°12′54″~30°14′05″N,面积约为4 km2,属于丘陵地区。影像拍摄时间为2015年3月,无人机飞行平台为大白Ⅱ,遥感传感器为佳能 5D Mark Ⅲ,单片像幅大小5 760×3 840像素,像素大小6.25 um,数码相机地面分辨率0.08 m,拍摄航高和绝对航高分别约为455和980 m,航拍时天气状况良好。试验区域共计7条航带,130张像片,布设像控点10个、检查点2个,均为外业实地测量。试验区航迹及相关点分布见图3。
3.2实际处理流程对比
3.2.1操作性对比。在Inpho系统中数据处理比较集中,基本都在ApplicationMaster平台中直接打开各个模块完成,仅图幅编辑和正射影像镶嵌需要另外打开SemaEditor和OrthoVista模块。在MapMatrix系统软件中空中三角测量加密是在DATMatrix软件中完成,DEM生成是在MapMatrix软件中完成,DOM制作则需要使用EPT软件。整个数据处理需要使用MapMatrix系统中多个软件,并且空中三角测量加密也是调用国外PATB软件(需要单独安装)完成,部分操作重复。整体来说,Inpho系统软件集成性高、操作性好。
3.2.2空中三角测量加密对比。Inpho系统空中三角测量加密使用自身的Match-AT模块完成,控制点量测后仅需要2步操作就可完成空中三角测量解算,并且空中三角测量报告有具体窗口分栏、详细呈现。MapMatrix系件空中三角测量加密是在DATMatrix中调用PATB完成,经内定向、自动转点、控制点量测和PATB平差可初步完成空中三角测量解算。并且经PATB空中三角测量加密后会产生大量争议点,需要手工编辑完争议点才能产生较好的平差结果,因此,所需工作量较大。两者比较,Inpho空中三角测量加密功能更强,效率更高。
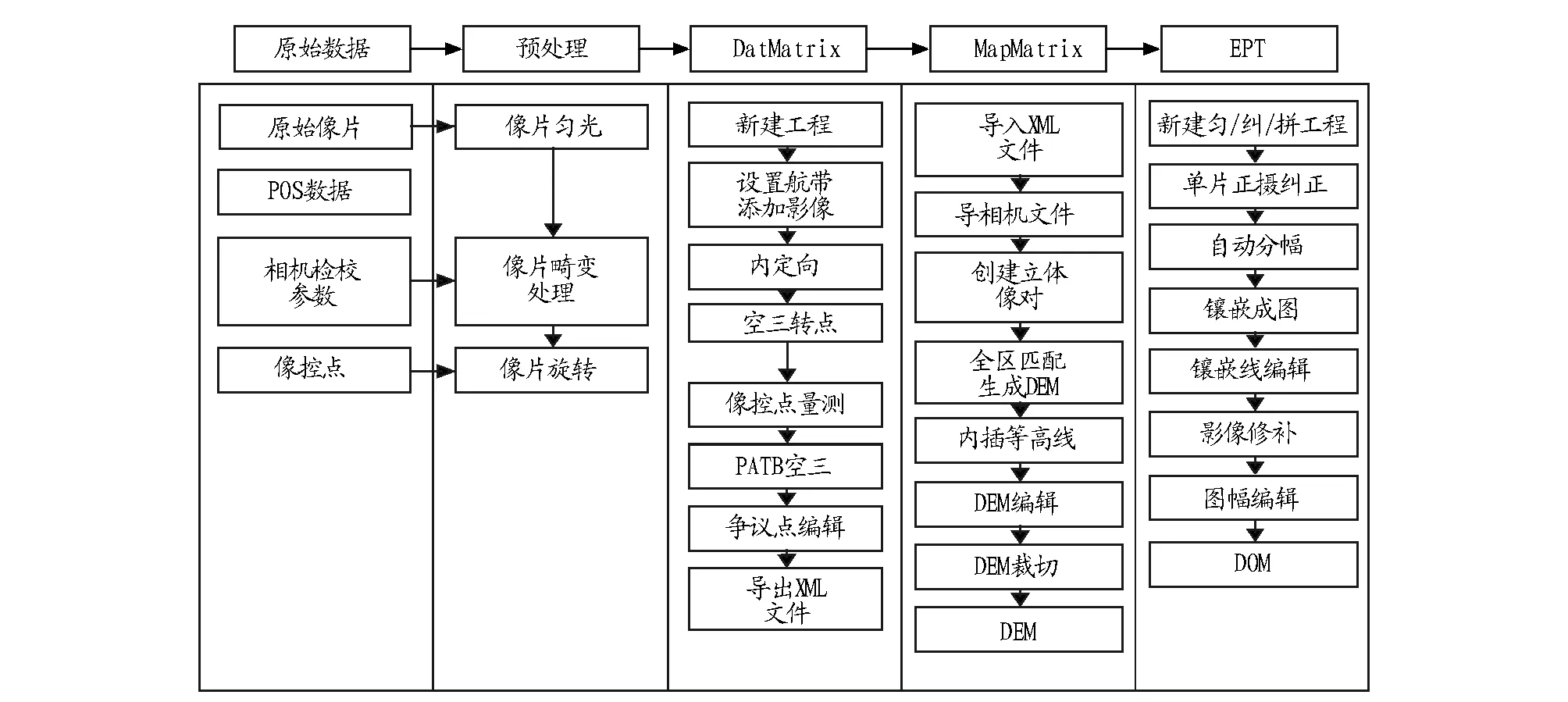
图2 MapMatrix系统无人机遥感数据处理流程Fig.2 Processing flow of MapMatrix in UAV remote sensing data
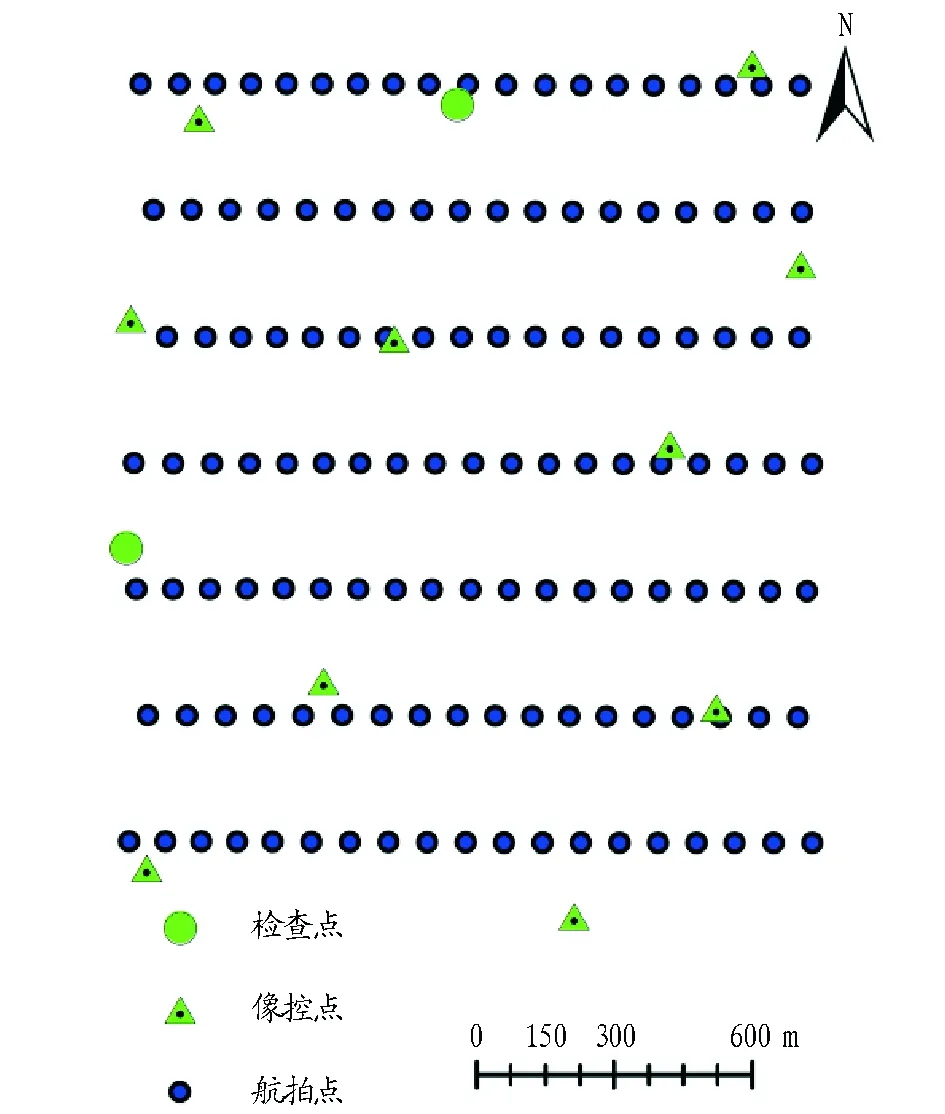
图3 试验区航迹及相关分布Fig.3 Distribution of the reference points and tracks in test site
3.2.3DEM制作对比。Inpho系统中使用Match-T DSM生成DTM,生成DEM的同时,可生成立体像对点云数据,再使用DTMaster进行DEM编辑。MapMatrix系统中创建立体相对后,可以通过“全区匹配”直接生成DEM。MapMatrix中也可生成立体像对点云,但是内嵌在DEM中,显示DEM时可以查看,通过“点编辑”工具可以进行点云编辑。Inpho和MapMatrix系统在DEM生成、编辑功能上相差不大,但是Inpho严格考虑断裂线和人工建筑,所生成的DTM比MapMatrix的好。严格上讲,两者生成的.dtm文件更偏向于DSM,这对DOM制作具有重要影响。
3.2.4DOM制作对比。Inpho系统使用OrthoMaster和OrthoVista模块,可以自动生成矢量镶嵌线和DOM。MapMatrix系统中DOM制作使用EPT软件,经“匀纠拼”和“批量分幅”后可生成标准分幅的DOM和矢量镶嵌线。主要区别在于Inpho中单片正射纠正和镶嵌是分开的,而MapMatrix系统中都集成在EPT中;EPT中就可进行镶嵌线和图幅编辑,而Inpho中需要单独打开OrthoVista SE模块。相比而言,OrthoVista虽是全球最强大的专业镶嵌产品,但作为国产航测处理软件EPT也不逊色,并且在镶嵌线编辑上更易操作、功能也强大。
3.3空中三角测量和DOM精度对比 资阳市雁江区1∶1 000无人机航空摄影数据经Inpho和MapMatrix系统处理后,所得的空中三角测量精度对比见表1。
试验测区Sigma Naught像点精度在Inpho中为0.39,在MapMatrix中为0.48,Inpho精度高,但均未超过0.5像素。控制点和检查点的平面与高程精度均符合《数字航空摄影测量 空中三角测量规范》(GB/T 23236—2009)[19]要求;其中,控制点平面精度在两个软件系统中相差不大,但Inpho的高程精度中误差为0.184,高于MapMatrix的0.258;Inpho的检查点平面精度和高程精度都高于MapMatrix。结果表明,面对1∶1 000丘陵地区无人机航摄数据时,只要标准操作、仔细平差,Inpho和MapMatrix系统都能有较好表现,成果像点精度高,平面和高程精度均能满足要求,可靠性强。2款软件系统处理无人机遥感数据后得到的平面精度相差并不显著,但是Inpho高程精度相对较好。
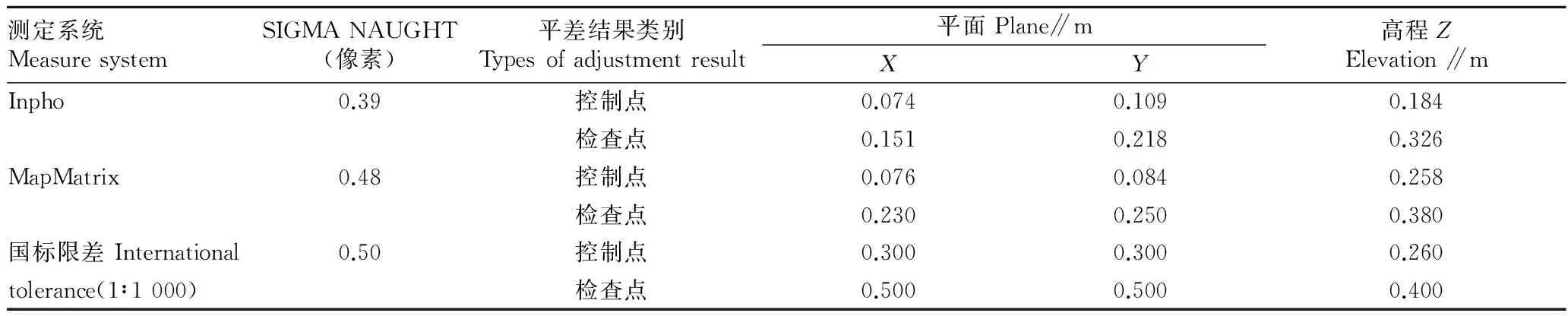
表1 空中三角测量加密后基本定向点平面与高程中误差
在ArcGIS中分别将Inpho和MapMatrix系统制作的DOM与DEM、等高线叠加,检查正射影像是否吻合。同时,利用检查点对DOM的成图精度进行检查,Inpho制作的DOM平面中误差为0.059 m,MapMatrix系统的为0.097 m,均远低于1∶1 000 DOM平面中误差限差0.6 m的要求,Inpho制作的DOM精度高于MapMatrix。
4结论与讨论
该研究以1∶1 000丘陵区无人机遥感影像为数据源,分别介绍了Inpho和MapMatrix系统的无人机遥感数据处理流程和方法,并对2款系统的数据处理流程、操作性、精度方面进行了实证对比研究。结果表明,Inpho系统软件集成性高、操作性好,其Match-AT空中三角测量模块的影像处理算法更加先进、独特,能提供高精度、高性能的数字航空三角测量;MapMatrix系统处理步骤分布在3个软件中,整体操作性没有Inpho便捷、流畅,并且空中三角测量需要单独调用PATB,在处理数据量和效率上没有Inpho高,但所得空中三角测量结果平面精度并不比Inpho差,高程精度略差;DOM镶嵌成图和编辑方面,MapMatrix更加便捷、高效。
一般情况下1∶1 000丘陵地区航测每平方公里布设1.5个点即可,此次实例研究中4 km2布设了10个像控点,远高于一般要求,这也导致两款系统平差精度相差不大,结果也完全符合国标要求。另外,此次对比研究仅仅使用单一比例尺单一地形数据——1∶1 000丘陵地区,没有涉及平地、山地和高山地,也没有在1∶500和1∶2 000比例尺下进行试验,因此,空中三角测量精度对比虽具有科学性,但不具有普遍性。为了全面衡量比较Inpho和MapMatrix这2款摄影测量系统,可以在更多的比例尺、更丰富的地形区域进行试验。
参考文献
[1] 李德仁,李明.无人机遥感系统的研究进展与应用前景[J].武汉大学学报(信息科学版),2014,39(5):505-513.
[2] KELCEY J,LUCIEER A.Sensor correction of a 6-band multispectral imaging sensor for UAV remote sensing[J].Remote sensing,2012,4(5):1462-1493.
[3] 田振坤,傅莺莺,刘素红,等.基于无人机低空遥感的农作物快速分类方法[J].农业工程学报,2013(7):109-116.
[4] 周洁萍,龚建华,王涛,等.汶川地震灾区无人机遥感影像获取与可视化管理系统研究[J].遥感学报,2009,12(6):877-884.
[5] FENG Q,LIU J,GONG J.UAV Remote sensing for urban vegetation mapping using random forest and texture analysis[J].Remote sensing,2015,7(1):1074-1094.
[6] 李勇志,支晓栋,唐海龙,等.无人机遥感技术在农业中的发展与应用[J].安徽农业科学,2015,43(25):350-351.
[7] 贾娇,艾海滨,张力,等.应急响应中PixelGrid无人机遥感数据处理的关键技术与应用[J].测绘通报,2013(5):62-65.
[8] 马东岭,崔健,丁宁,等.一种数字正射影像图制作方法[J].测绘科学,2013,38(4):188-189.
[9] 邹晓亮,缪剑,张永生,等.基于像素工厂的无人机影像空三优化技术[J].测绘科学技术学报,2012,29(5):362-367.
[10] 宗秀影.LPS在无人机数据处理中的应用[J].测绘通报,2011(2):90-91.
[11] 宋树军.IPS在无人机遥感影像处理中的应用[J].测绘地理信息,2014,39(4):65-69.
[12] 陈荻,李卫正,孔文丽,等.基于低空高分辨影像的三维绿量计算方法:以南京林业大学校园为例[J].中国园林,2015,31(9):22-26.
[13] 李艳,徐明,阳俊.基于ImageStation OrthoPro的数字正射影像自动处理[J].测绘与空间地理信息,2012,35(1):211-212.
[14] 张建霞,王留召,王宝山.JX4系统处理数码相机影像方法研究[J].测绘科学,2007,32(3):160-161.
[15] 朱传勇,文琳,沈莹,等.基于MapMatrix的武汉市1∶2000DEM制作[J].地理空间信息,2015(2):101-103.
[16] 范燕芳,邹丹,陈绍杰.VirtuoZo在城市测绘中的应用[J].测绘通报,2012(S1):424-426.
[17] 肖波,朱兰艳.基于DPGrid的低空无人机遥感影像应用技术研究[J].地矿测绘,2015,31(1):22-25.
[18] 王商富.基于Geoway CIPS进行带POS数据的大比例尺正射影像快速生产初探[J].城市勘测,2012(3):73-76.
[19] 国家测绘局.数字航空摄影测量 空中三角测量规范:GB/T 23236—2009[S].北京:中国标准出版社,2009.
Comparative Study of Inpho and MapMatrix in UAV Remote Sensing Data Processing
WANG Si-meng1, ZHU Da-ming1*, WANG De-zhi2et al
(1. School of Land Resource Engineering, Kunming University of Science and Technology, Kunming, Yunnan 650093; 2. School of Information Engineering, China University of Geoscience, Wuhan, Hubei 430074)
AbstractWe described the processing flow, software features and advantages of two famous photogrammetric systems overseas Inpho and domestic MapMatrix system (including MapMatrix, DATMatrix and EPT) in UAV remote sensing image. With a piece of data of 1∶1 000 UAV aerial photography in Yanjiang District of Ziyang City as the experimental data, we compared the actual processing flow and accuracy of this two systems. The main conclusions were as follows: ① In processing 1∶1 000 UAV remote sensing data, Inpho and MapMatrix system’s aerophotogrammetry accuracy and image quality all could meet the national standard, and there were little differences between the two planar accuracy, and Inpho’s height accuracy was relatively better than MapMatrix’s. ② InPho system had high integration, good operability, strong aerophotogrammetry, high degree of automation; and MapMatrix system had to call PATB in aerophotogrammetry. The handling high data volumes and efficiency of MapMatrix system were less than Inpho, and it needed to manually edit a lot of the issue points. ③ MapMatrix was more convenient and efficient in mosaic and editing images.
Key wordsUAV remote sensing; DOM; Inpho; MapMatrix; Aerophotogrammetry
基金项目国家自然科学基金项目(41361090)。
作者简介汪思梦(1990- ),女,湖北天门人,硕士研究生,研究方向:土地资源与信息技术、航测遥感数据处理。*通讯作者,副教授,博士,从事3S集成与应用研究。
收稿日期2016-03-25
中图分类号S 127
文献标识码A
文章编号0517-6611(2016)11-264-04
