
长水平段水平井靶区多控制点轨道优化设计方法*
2016-06-23 13:29:36孔德林
中国海上油气 2016年5期
孔德林 李 黔
(西南石油大学 四川成都 610500)
长水平段水平井靶区多控制点轨道优化设计方法*
孔德林 李 黔
(西南石油大学 四川成都 610500)
孔德林,李黔.长水平段水平井靶区多控制点轨道优化设计方法[J].中国海上油气,2016,28(5):92-97.
Kong Delin,Li Qian.Optimization of borehole trajectory with multi-control points for long lateral section horizontal wells[J].China Offshore Oil and Gas,2016,28(5):92-97.
试算法设计的多控制点水平井轨道造斜段多、轨迹控制作业难度大,不利于快速钻井。结合水平井“PDC钻头+弯外壳螺杆钻具”复合钻快速钻井特点,提出了长水平段水平井靶区多控制点轨道优化设计方法,即先用直线间隔连接控制点得到控制单元,再通过选择适当曲线连接相邻控制单元形成二维或三维控制单元体。实例计算结果表明,本文提出的优化设计方法设计的靶区多控制点水平井轨道稳斜段总进尺长,三维水平井轨道可在装置角保持不变的情况完成轨迹控制作业,有利于复合钻快速钻井和提高作业效率。
长水平段;水平井;靶区;多控制点;控制单元;轨道设计
为提高非常规致密油气的开发效益,长水平段水平井技术应用越来越多[1-5]。由于背斜、褶皱等构造因素影响,储层存在一定的起伏,如果将入靶点A和出靶点B用直线连接,井眼轨道可能会偏离储层,这时地质设计可根据需要在A点和B点之间加入若干控制点来保证井眼轨道在储层内延伸(图1)。目前国内外学者对多目标井、多靶区水平井等轨道设计问题进行了相关研究[6-12],但并未对水平井靶区多控制点轨道设计问题进行探讨。而现场在遇到这类问题时常采用试算法来完成,即采用直线或圆弧进行逐点设计,得到的轨道造斜段多,轨迹控制作业难度大,不利于水平井如“PDC钻头+弯外壳螺杆钻具”等复合钻快速钻井技术的应用。为了有利于复合钻快速钻井技术应用和提高轨迹控制作业效率,本文提出了长水平段水平井靶区多控制点轨道优化设计方法,将控制点转化为控制单元进行设计,进而开展了水平井靶区多控制点二维和三维控制单元体轨道设计方法研究,以期为长水平段水平井靶区多控制点轨道优化设计提供指导。
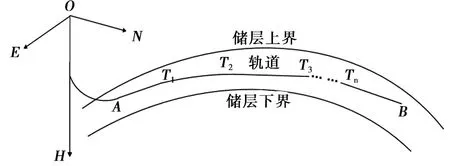
图1 背斜构造储层多控制点水平井轨道示意图
1 控制单元划分
为了设计出既连续光滑又拥有尽可能长的稳斜段进尺的靶区轨道,先间隔划分控制单元,再选择合适的曲线依次连接控制单元。以图1所示的背斜构造储层为例,在靶区入靶点A和出靶点B之间含有T1、T2、T3…Tn等共n个控制点,先利用直线连接相邻的点得到控制单元,然后选择合适的曲线连接相邻的控制单元构成控制单元体。对于含不同数量目标点(包括入靶点、出靶点和控制点)的靶区,在划分控制单元时采取不同的策略,具体如下:
1)如果靶区中存在3点或3点以上共线的目标点,先将这些目标点划分为一个控制单元,再间隔划分其他控制单元;
2)如果靶区中不存在3点或3点以上共线的目标点,需要分别对含奇数和偶数个目标点的情况进行讨论。当目标点数量为奇数时,分别采用从入靶点开始间隔划分控制单元和从出靶点反向间隔划分控制单元,取这2种方式中稳斜段进尺长的方式作为最优控制单元划分方法;当目标点数量为偶数时,最佳方法是从入靶点开始间隔划分控制单元。
对于任意控制单元:

(1)
αi=arccos[(Hi+1-Hi)/Li]
(2)
(3)

经过控制点向控制单元的转化后,根据已有的轨道设计方法对二维及三维控制单元体设计进行研究。整个靶区多控制点轨道优化设计流程如图2所示。
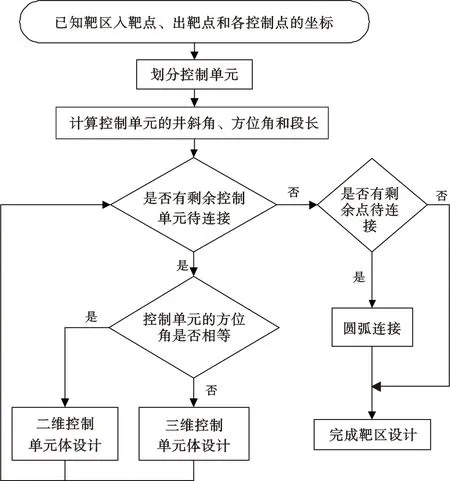
图2 水平井靶区多控制点轨道优化设计流程
2 二维控制单元体设计
二维控制单元体是指由方位角相等的控制单元组成的控制单元体。已知控制单元体各点坐标(N,E,H),并以各点作为坐标下标进行表示。相邻控制单元连接方式存在以下2种情况:
1) 拱形控制单元体(图3)。
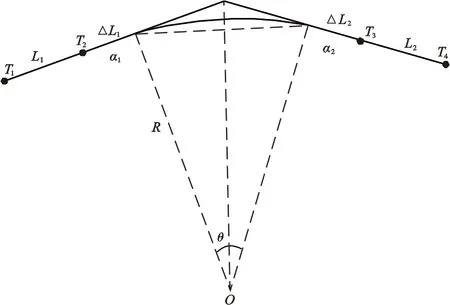
图3 拱形控制单元体示意图
图3中,根据几何关系,当α1≠α2时
θ=α2-α1
(4)
(5)
(6)
其中
ΔH=HT3-HT2
(7)

(8)
式(4)~(8)中:ΔL1、ΔL2分别为第1和第2稳斜段段长,m;NT2、NT3分别为第2目标点和第3目标点的北坐标,m;ET2、ET3分别为第2目标点和第3目标点的东坐标,m;HT2、HT3分别为第2目标点和第3目标点的垂深,m;R为曲率半径,m;α1、α2分别为第1和第2控制单元的井斜角,(°);θ为中心角,(°)。
由于式(5)和(6)中存在3个未知参数,因此需要增加1个约束方程。在控制单元划分后,ΔH、ΔS、α1、α2随之确定,随着ΔL1和ΔL2的增大,R会减小,即圆弧段的井眼曲率会增大,在合理设计的前提下为了确保井眼曲率最小,需要ΔL1或ΔL2为0,或二者同时为0。先取ΔL1=0,求得R并代入式(6)得到ΔL2,如果ΔL2≥0,则设计合理;如果ΔL2<0,则设计不合理,再取ΔL2=0,求得R并代入式(5)得到ΔL1,如果ΔL1也小于0,则采用下面的阶梯形控制单元体模型。
2) 阶梯形控制单元体(图4)。
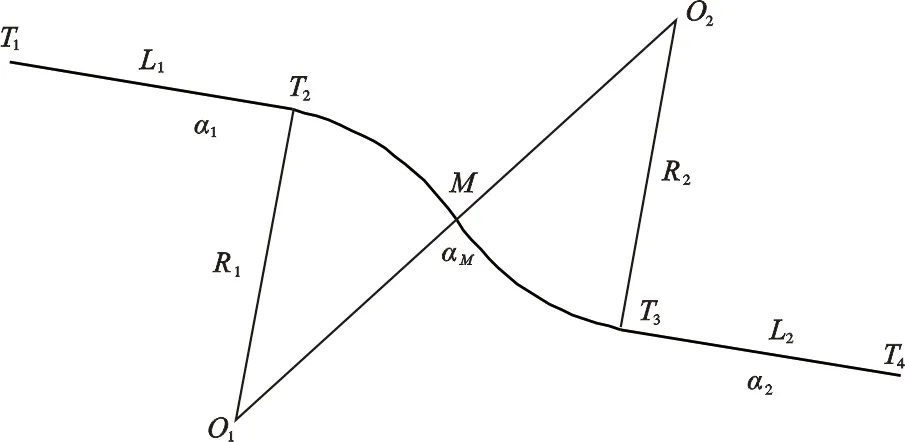
图4 阶梯形控制单元体示意图
图4中,根据几何关系可得
(9)
(10)
其中

(11)

(α2≠α1)
(12)
(13)
特别地,当α1=α2时
R1=-R2=
(14)
式(9)~(14)中:R1、R2分别为第1和第2曲率半径,m;αM为中间控制单元的井斜角,(°);其他符号含义同前。
3 三维控制单元体设计
三维控制单元体是指由方位不等的控制单元组成的控制单元体。目前,常用的三维轨道设计模型有斜面圆弧、恒装置角曲线、螺线圆弧和自然曲线等。本文选用恒装置角曲线[13]连接相邻控制单元,其坐标增量公式如下:
(15)
(16)

(17)
(18)

(19)
其中
(20)


(21)
式(21)中:上标′、″分别表示第一恒装置角曲线和第二恒装置角曲线相关参数;其他符号含义同前。
当井斜角小于90°时,可采用恒装置角曲线的幂级数展开式进行相关求解[14];而当井斜角大于90°时,可利用数值算法进行求解。
4 实例分析
4.1 轨道设计分析
例1:以大庆油田垣平1井为例[15],分别采用本文优化设计方法和试算法进行靶区轨道设计,结果分别见表1和表2。对比可知,本文优化设计方法设计的该井稳斜段总进尺为1 707.96 m,造斜段总进尺为1 308.82 m;而试算法设计的该井稳斜段总进尺为1 041.28 m,造斜段总进尺为1 975.85 m,本文优化设计方法稳斜段更长、造斜段更短,更适合低成本复合钻快速钻井技术的应用。
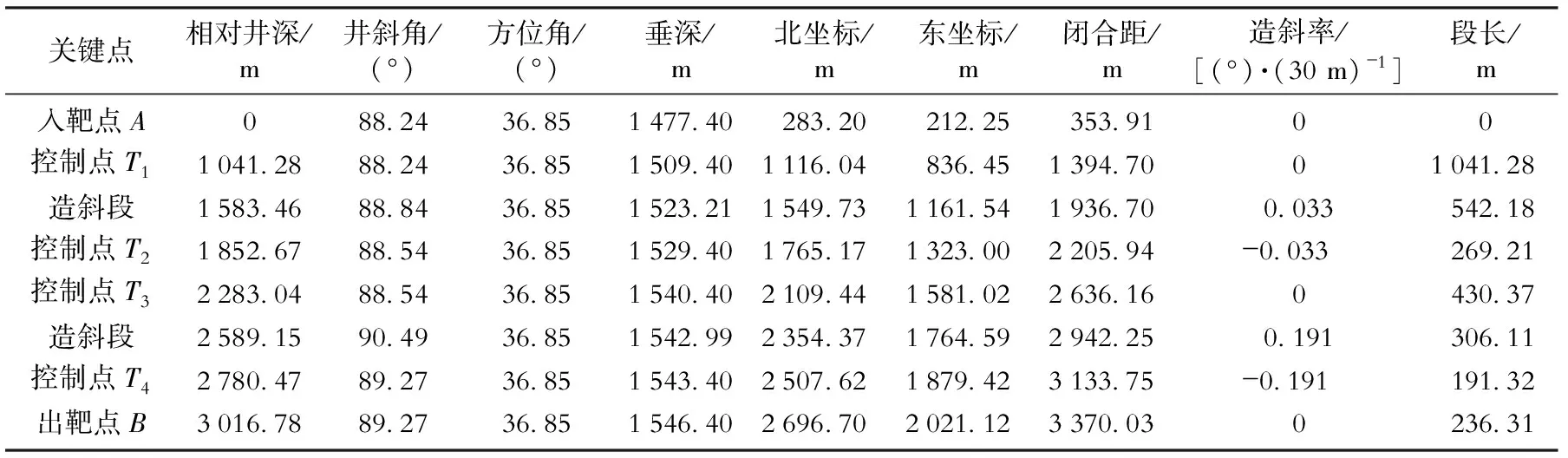
表1 本文优化设计方法设计的大庆油田垣平1井二维井眼轨道
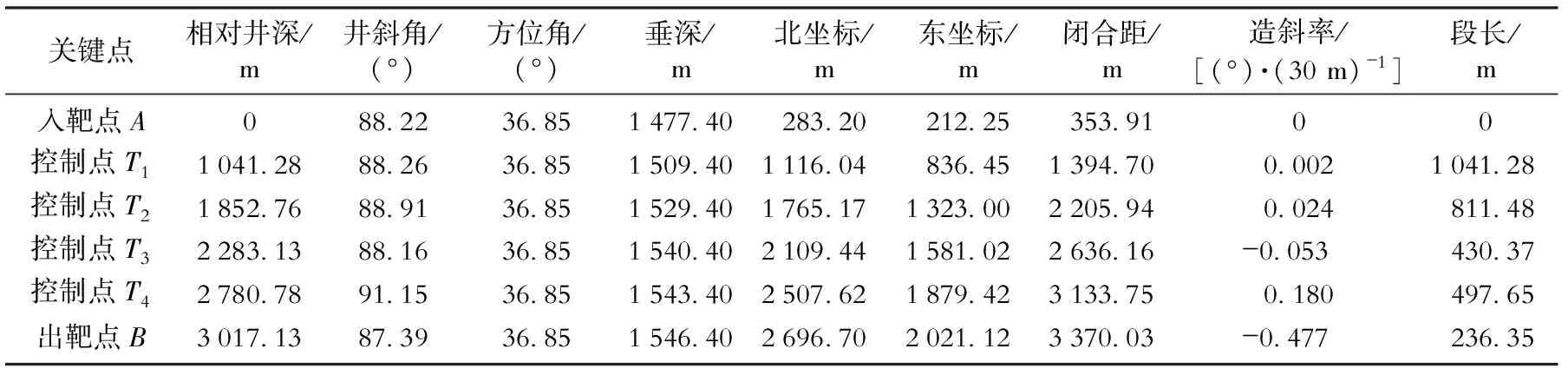
表2 试算法设计的大庆油田垣平1井二维井眼轨道
例2:以新疆油田某长水平段水平井为例,已知靶区入靶点A(827.70,112.40,340.30)、T1(835.90,209.21,680.46)、T2(843.10,296.67,975.85)、B(850.50,457.60,1 248.20),分别采用本文优化设计方法和试算法进行靶区轨道设计,结果分别见表3和表4。对比可知,本文优化设计方法设计的该井稳斜段总进尺为670.19 m,造斜段总进尺为310.21 m;而试算法设计的该井稳斜段总进尺为353.76 m,造斜段总进尺为628.68 m,可见本文优化设计方法稳斜段更长、造斜段更短,更适合复合钻快速钻井技术的应用。
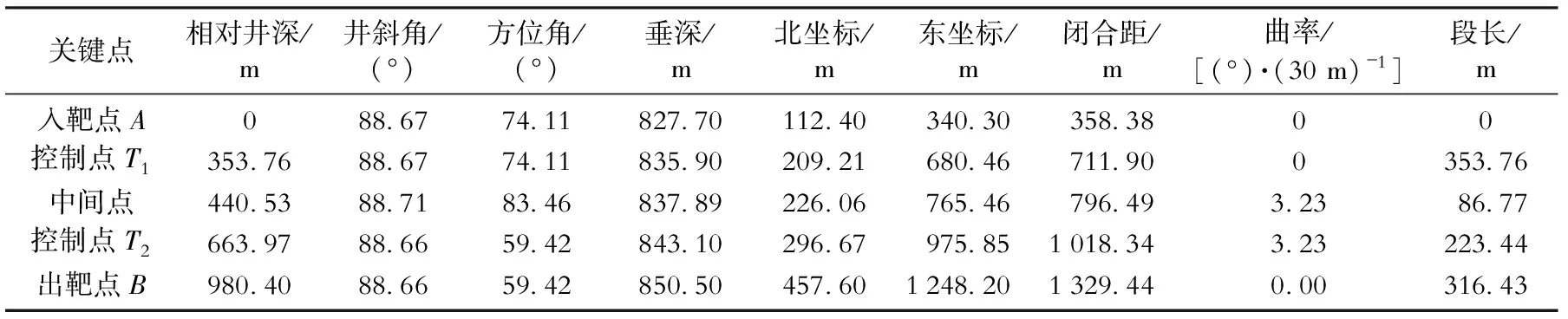
表3 本文优化设计方法设计的新疆油田某水平井三维井眼轨道

表4 试算法设计的新疆油田某水平井三维井眼轨道
4.2 平滑度分析
为了提高机械钻速和降低轨迹控制难度,设计轨道越平滑越好,而井斜角的变化影响着水平段井眼轨道的平滑程度。为此引入平滑度的概念,定义为水平段相邻2个关键点井斜角之差,即
So=|αn+1-αn|
(22)
式(22)中:So为平滑度,(°);αn+1、αn分别为第n+1、第n个关键点的井斜角,(°)。
根据表1、2结果,作出造斜率随靶点数量变化曲线和平滑度随靶点数量变化曲线,如图5、6所示。
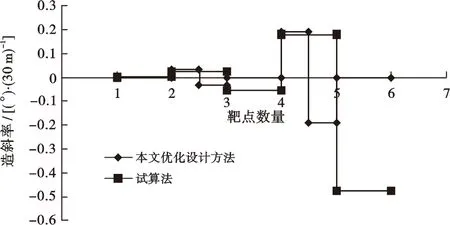
图5 不同方法设计的大庆油田垣平1井造斜率随靶点数量变化曲线
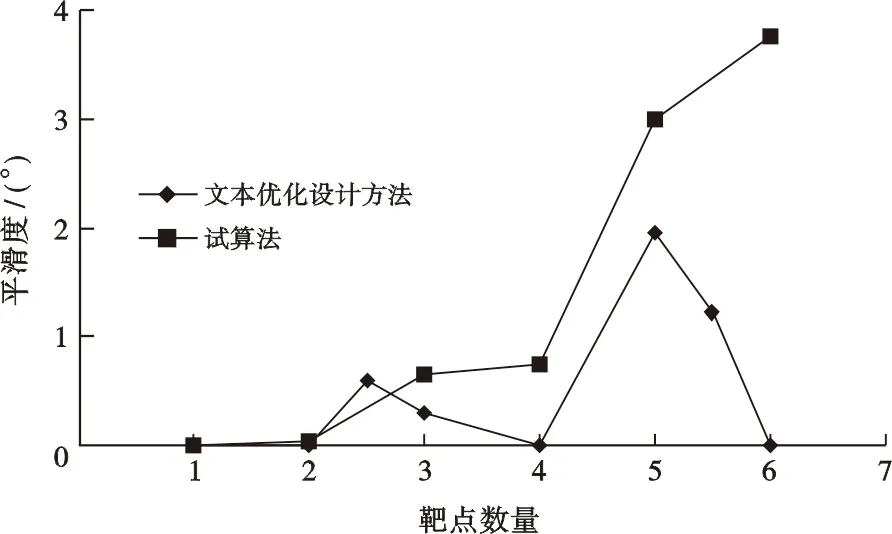
图6 不同方法设计的大庆油田垣平1井平滑度随靶点数量变化曲线
从图5、6可以看出,随着靶点数量的增多,试算法设计的井眼轨道造斜率和平滑度一直在不断地增大,井眼会越来越波动,摩阻扭矩也会随之增加,使得作业管柱难于下入;而本文优化设计方法设计的井眼轨道造斜率和平滑度在控制单元处都有一个明显回归过程,因而井眼轨道更加平滑,有利于提高水平段机械钻速和控制井眼轨迹。
5 结论
1) 针对水平井复合钻快速钻井技术特点,将控制点转化为控制单元,提出了长水平段水平井靶区多控制点轨道优化设计方法。
2) 实例计算分析表明,与试算法相比,利用本文优化设计方法设计的水平井靶区多控制点轨道稳斜井段总进尺长,井眼平滑,便于轨迹控制,有利于水平井复合钻快速钻井技术的应用。
[1] 闫振来,牛洪波,唐志军,等.低孔低渗气田长水平段水平井钻井技术[J].特种油气藏,2010,17(2):105-108,115. Yan Zhenlai,Niu Hongbo,Tang Zhijun,et al.Drilling technology of long horizontal section for low porosity and low permeability gas field[J].Special Oil & Gas Reservoirs,2010,17(2):105-108,115
[2] 何龙,李文生,刘伟.川西地区长水平段水平井钻井技术[J].钻采工艺,2013,36(5):114-116. He Long,Li Wensheng,Liu Wei.Long horizontal section of horizontal well drilling technology in western Sichuan[J].Drilling & Production Technology,2013,36(5):114-116
[3] 牛洪波.大牛地气田长水平段井眼轨迹控制方法[J].天然气工业,2011,31(10):64-67. Niu Hongbo.Long horizontal well track method of Daniudi gas field[J].Natural Gas Industry,2011,31(10):64-67
[4] 韩来聚,牛洪波.对长水平段水平井钻井技术的几点认识[J].石油钻探技术,2014,42(2):7-11. Han Laiju,Niu Hongbo.Understandings on drilling technology for long horizontal section wells[J].Petroleum Drilling Techniques,2014,42(2):7-11
[5] 陈海力,王琳,周峰,等.四川盆地威远地区页岩气水平井优快钻井技术[J].天然气工业,2014,34(12):100-105. Chen Haili,Wang Lin,Zhou Feng,et al.Rapid and efficient drilling of horizontal wells in the Weiyuan shale gas field,Sichuan Basin[J].Natural Gas Industry,2014,34(12):100-105
[6] 刘修善.阶梯形水平井段设计方法研究[J].石油钻探技术,2005,33(3):1-5. Liu Xiushan.Well trajectory design in step-horizontal hole sections[J].Petroleum Drilling Techniques,2005,33(3):1-5
[7] 刘修善.拱形水平井的设计方法研究[J].天然气工业,2006,26(6):63-65. Liu Xiushan.Research of arch horizontal well design method[J].Natural Gas Industry,2006,26(6):63-65
[8] 佟长海,常汉章,鲁港.多控制点水平井靶体参数的计算[J].天然气工业,2007,27(9):68-70. Tong Changhai,Chang Hanzhang,Lu Gang.Calculating parameters of horizontal well targets with multiple control points[J].Natural Gas Industry,2007,27(9):68-70
[9] 黄根炉,赵金海,赵金洲.复杂多目标井靶区轨道设计方法研究[J].天然气工业,2006,26(10):69-71. Huang Genlu,Zhao Jinhai,Zhao Jinzhou.Study on trajectory design in target area for complex multi-target directional well[J].Natural Gas Industry,2006,26(10):69-71
[10] GUO Y,FENG E.Nonlinear dynamical systems of trajectory design for 3D horizontal well and their optimal controls [J].Journal of Computational and Applied Mathematics,2008,212(2):179-186
[11] ELNAGAR A,HUSSEIN A.On optimal constrained trajectory planning in 3D environments[J].Robotics and Autonomous Systems,2000,33(4):195-206
[12] QI Bin,CHEN Ping,XIA Hongquan,et al.Optimizing the method used to design the trajectory of a horizontal well [J].Chemistry and Technology of Fuels and Oils,2014,50(4): 337-343
[13] 韩志勇.三维定向井轨道设计和轨迹控制的新技术[J].石油钻探技术,2003,31(5):1-3. Han Zhiyong.The new techniques of well trajectory design and well path control fit for 3D-directional wells[J].Petroleum Drilling Techniques,2003,31(5):1-3
[14] 方敏,鲁港,王立波.恒装置角曲线的半解析计算[J].同济大学学报(自然科学版),2008,36(6):844-848. Fang Min,Lu Gang,Wang Libo.Semi-Analytic computing of Constant-Toolface-Angle curves[J].Journal of Tongji University(Natural Science),2008,36(6):844-848
[15] 陈琳琳,王永吉,李瑞营.垣平1井长水平段水平井设计与施工[J].石油钻探技术,2013,41(6):115-119. Chen Linlin,Wang Yongji,Li Ruiying.Design and drilling of horizontal well Yuanping 1 with long lateral section[J].Petroleum Drilling Techniques,2013,41(6):115-119.
(编辑:孙丰成)
Optimization of borehole trajectory with multi-control points for long lateral section horizontal wells
Kong Delin Li Qian
(SouthwestPetroleumUniversity,Chengdu,Sichuan610500,China)
Trajectories of horizontal wells with multi-control points designed by the trial method have many building sections, is difficult to control and not conducive to fast drilling. Therefore, based on the characteristics of the combination of "PDC bit + bent-housing positive displacement motor", a design method for optimized trajectory with multi-control points for long lateral section horizontal wells was proposed. In this method, the control points are linked by straight lines to generate control segments, then an appropriate curve is selected to connect the adjacent segments, which is called two-dimensional or three-dimensional control segment. An example of application shows that the total length of holding section by the proposed design method is much longer. Moreover, with the 3D trajectory designed by this method, tool face angle can be kept constant while deflecting, which facilitates the implementation of compound drilling technology and enhances drilling efficiency.
long lateral section; horizontal well; multi-control points; control segment; trajectory design
*“十二五”国家科技重大专项“钻井工程设计与工艺软件(编号:2011ZX05021-006)”、中国石油天然气集团公司科学研究与技术开发项目“钻井工程设计与控制一体化软件V2.0升级版开发(编号:2014B-4316)”部分研究成果。
孔德林,男,2016年毕业于西南石油大学石油与天然气工程学院油气井工程专业,获硕士学位,目前从事钻井工艺研究。地址:四川省成都市新都区西南石油大学(邮编:610500)。E-mail:292997953@qq.com。
1673-1506(2016)05-0092-06
10.11935/j.issn.1673-1506.2016.05.015
TE243+.1
A
2015-10-29 改回日期:2016-03-27
猜你喜欢
建筑与装饰(2024年1期)2024-01-25 08:47:56
河南科技(2023年23期)2024-01-16 10:17:16
现代仪器与医疗(2021年6期)2022-01-18 03:22:48
现代仪器与医疗(2021年5期)2021-12-02 02:11:28
吉林化工学院学报(2021年5期)2021-06-17 06:54:26
中国科技纵横(2020年16期)2021-01-27 02:54:44
国际放射医学核医学杂志(2020年4期)2020-07-27 01:53:26
建材与装饰(2018年41期)2018-10-11 08:09:20
华南理工大学学报(自然科学版)(2017年5期)2017-07-18 01:34:42
工业设计(2016年7期)2016-05-04 04:02:23
