
深海滑翔机技术与应用现状
2016-06-22 09:12俞建成刘世杰金文明
工程研究-跨学科视野中的工程 2016年2期
俞建成,刘世杰,金文明,黄 琰
(中国科学院沈阳自动化研究所,辽宁沈阳 110016)
深海滑翔机技术与应用现状
俞建成,刘世杰,金文明,黄琰
(中国科学院沈阳自动化研究所,辽宁沈阳 110016)
摘要:水下滑翔机是一种无外挂驱动、依靠自身浮力和姿态调节控制其运动的新型水下机器人,是一种逐渐成熟的适用于长时间、大范围海洋环境观测的新技术平台。本文概述了深海滑翔机在动力、控制、通信以及探测方面的系统组成,介绍了国内外水下滑翔机技术的发展和现状,以及水下滑翔机应用的国内外现状。以中国科学院沈阳自动化研究所开发的Sea-Wing水下滑翔机为例,详细阐述近年来国内深海滑翔机在平台技术和科学应用上取得的成果。最后结合深海滑翔机发展现状,分析其核心技术及发展趋势,展望深海滑翔机未来在我国周边海域观测组网的应用前景。
关键词:深海滑翔机;海洋探测;覆盖观测;水下机器人
引言
水下滑翔机(Autonomous Underwater Glider)是一种新型的海洋环境水下观测平台,它通过自身浮力的微小变化提供驱动力,配合水平翼的升力将垂直运动转换为水平运动,采用内置的姿态调整机构改变姿态以实现滑翔运动。其特殊的驱动及控制方式保证了其能耗小、噪声低的特点,在国内外都受到了极大的关注。1989年美国人Stommel提出了采用一种能够在水下作滑翔运动的浮标进行海洋环境调查的设想,这就是水下滑翔机的最初概念。
21世纪,人类对海洋的探测和研究发展到了前所未有的高度。几乎所有国家和地区的海洋政策都强调了人类对海洋管理、生命物种保护、海洋经济持续发展和海洋科学研究的迫切需求。人们对海洋洋流、温盐特性的观测和预报有利于高效安全的管理。传统的海洋观测手段,通常采用固定系泊设备和海面船进行采样观测。固定系泊虽然可以进行时变信息测量,却不能解决空间尺度变化的观测问题。作为传统的核心观测平台,海面船虽然能够观测海洋特性,但却存在运行成本昂贵以及缺乏持续观测能力等缺点。卫星可以高效完成海面观测,但缺乏海洋垂向尺度的探测能力。垂面剖面信息相比于水平面信息,往往能反映出更多的海洋特性。
为克服传统海洋观测工具的缺陷,水下滑翔机技术得到了快速发展,现已成为常规的、可持续的、高分辨率海洋观测平台。水下滑翔机具有典型锯齿状剖面运动能力,水平速度可达0.7-1km/h,持续观测时间一般长达几个月,续航能力可达上千公里。水下滑翔机携带的传感器可测量深度、温度、盐度和洋流等物理特性,以及多样的浮游动植物等生物特性和溶解氧、硝酸盐等在内的重要化学特性。另外,水下滑翔机在国外许多海洋观测计划和实验中有成熟应用的先例,实现了长达数月的持续采样能力、安全可靠的近海岸巡航能力、极端天气条件下的观测能力,同时具有低成本特点。
1 深海滑翔机系统组成
深海滑翔机使用自身净浮力作为驱动力,通过浮力调节系统动态地改变排水体积来调节载体自身浮力, 为载体提供上浮和下潜的动力。载体的姿态调节通过调节机构的运动,改变系统重心与浮心的轴向相对位置,使系统具有一定的俯仰角,从而使其能够保持一定的俯仰角进行上浮和下潜滑翔运动。深海滑翔机在正负浮力以及姿态调节的共同作用下通过滑翔翼板产生使载体水平和垂直运动的驱动力,并且能够根据需要通过控制完成设定的滑翔周期。
相比较于浮标等观测平台,深海滑翔机在航向的可控性上有绝对的优势。当前的滑翔机系统的航行调节方式基本上可以分为两种:第一种是通过改变整个载体的横倾角来改变水下滑翔机的航向,一般通过旋转一个不对称的电池包来实现;第二种是通过转向舵结构来实现转向。
深海滑翔机在水面漂浮时使用GPS接收器来确定当前位置,通过铱星通信系统来与岸基控制系统进行通信,将采集到的数据传送回岸基系统,并且获得下一周期的任务指令,获得任务后,滑翔机重新下潜直到设定深度后上浮。两次正常上浮到表面的时间间隔称作一个滑翔周期,滑翔机在一个周期内在空间上完成一个剖面。在下潜期间,除配有声学装置的水下滑翔机,一般不能与岸基取得通信联系。载体控制系统采用姿态与深度的闭环控制来执行预编程任务。在一些滑翔机的控制系统中还会执行某种算法来预估滑翔机在水底的位置,比如航位推算法等。
深海滑翔机的天线(包括GPS和翼型等)通常集成在尾部一根长杆的顶端,通过控制滑翔在出水后的姿态将天线接收端最大限度地抬离水面,使得载体能够与卫星建立稳定的通信。除了本身的位置、姿态和状态等信息,滑翔机通过科学传感器来收集海洋特征数据,搭载的典型的传感器有温、盐、深传感器(CTD)。根据具体科学任务的需求,已经有多种测量各种海洋环境参数的传感器搭载到滑翔机上,进一步拓宽了深海滑翔机的工作能力。当然,传感器的增多加大了采样时间,数据的增多又意味着通信时间变长,这些都会导致更多的能量消耗而使得任务的执行时间变短。
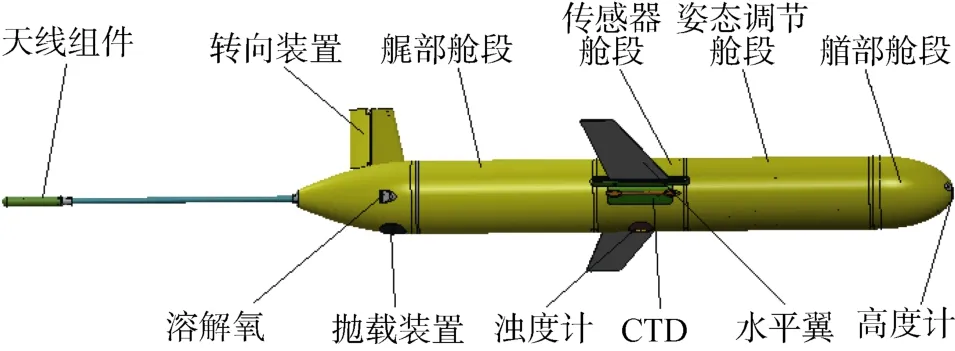
图1 “海翼号”深海滑翔机三维效果图

图2 电能Slocum、Seaglider和Spray水下滑翔机
中国科学院沈阳自动化研究所研制的“海翼号”深海滑翔机[1][2]的三维效果图如图1所示。“海翼号”本体采用模块化设计,分为艏部舱段、姿态调节舱段、观测舱段和尾部舱段等4个舱段。艏部舱段主要安装电子罗盘TCM3、高度计和深度计;观测舱段主要安装CTD,可以根据需求定制扩展其他传感器;姿态调节舱段安装有俯仰调节装置、横滚调节装置、载体控制单元等;尾部舱段安装浮力调节装置、应急处理单元、卫星通信定位模块、无线电通信模块以及通信定位天线等。
2 深海滑翔机技术现状
2.1国外深海滑翔机技术现状
美国作为滑翔机技术的起源地和领军者,自二十世纪90年代开始滑翔机的技术研究,目前滑翔机单体技术已经非常成熟,具有Slocum[3]、Spray[4]和Seaglider[5]等多款滑翔机产品,如图2所示,且产品的可靠性和实用化程度高,应用广泛。
Slocum水下滑翔机按照浮力驱动系统的等级,已有30m、100m、200m、350m、1000m等多种系列,是当前应用最为广泛的一款滑翔机产品。Seaglider水下滑翔机使用与海水压缩率相似的材料作为耐压壳体,可以有效的减小滑翔机的浮力改变量,更节省能源。Spray水下滑翔机是目前投入实际应用潜深最大的滑翔机,工作深度为1500m。
目前,这三种水下滑翔机已经实现产品化,分别由Webb Research、Kongsberg和Bluefin三家公司负责生产,并用于海洋观测与资源开发中的复杂海洋环境下的各种水下观测、水下作业等任务,是海洋观测与资源开发系统装备中的重要组成部分。
此外,法国、日本、加拿大、韩国、新西兰等国家也先后开展了水下滑翔机研究与研制工作。2009年法国ACSA Underwater GPS 公司开发成功水下滑翔机SeaExplorer[6],目前也已经达到实用化和商品化。
为提高滑翔机的速度以及应对在较浅海域应用的难题,近年来,在海军研究办公室的资助下,美国Exocetus公司耗时6年先后研发了ANT littoral glider和Exocetus Coastal Glider。在6年中Exocetus公司共向美国海军交付了18台滑翔机,这些滑翔机共进行了4500小时的作业。Exocetus Coastal Glider的浮力系统容量可达5L,使得滑翔机运行速度很容易达到2节,与其他滑翔机比较,性能优势明显。
随着滑翔机的广泛应用和使用需求的逐步深入,为提高滑翔机在较强海流下的抗流能力,混合推进水下滑翔机也逐渐成为当前的研究热点和未来的重要发展方向。
2012年至今,针对美国Webb Research公司生产的Slocum水下滑翔机,加拿大The Memorial University of Newfoundland(MUN)、National Research Council Canada 和美国TWR的研究人员在其尾部加装可折叠螺旋桨推进器[7],以增强当前滑翔机在浅海运行的机动能力,拓展应用范围和海域,如图3所示。当需要推进运动时,滑翔机尾部螺旋桨展开,增加航行速度;需要滑翔运动时,尾部螺旋桨折叠,从而减少滑翔阻力。
法国ACSA公司、NURC(NATO Undersea Research Centre,北约水下研究中心)和ENSIETA学院等也成功研发了各自的混合推进水下滑翔机SeaExplorer、Folaga和Sterne。其中SeaExplorer结合水下声学定位系统,能够不浮出水面完成自定位,可用于长时海洋监测和冰下测量。目前SeaExplorer也已经实现商品化,得到一定程度的应用。

图3 Slocum混合推进滑翔机
为突破滑翔机的深度极限,美国华盛顿大学海洋学院(University of Washington, School of Oceanography)研制了用于深海环境监测的长航程水下滑翔机Deepglider[8],其长度1.8m,重量62kg,设计深度为6000m,航程10000km,连续工作时间为18个月,可搭载温度、盐度和溶解氧等传感器。3台Deepglider于2011年在大西洋做了海试研究,最大下潜深度达到了5920m,航程总计275km。从2014年3月至今,研究人员又在百慕大海域布放了两台Deepglider滑翔机,对采集和发送数据情况进行进一步测试。
2.2国内深海滑翔机技术现状
由于国外的技术封锁,我国水下滑翔机均为自主研发,相关研究工作起步较晚。2003年中国科学院沈阳自动化研究所开展了与水下滑翔机相关的基础研究工作,成功开发出了水下滑翔机原理样机,并完成了湖上试验。从2007年开始在国家863计划的支持下,中国科学院沈阳自动化研究所开展了水下滑翔机样机的研制工作,2008年研制成功我国水下滑翔试验机样机。2012年开始,由总参大气环境研究所、天津大学、中科院沈阳自动化研究所、华中科技大学、中国海洋大学共同承担“863计划”项目“深海滑翔机研制及海上试验研究”,进行多型水下滑翔机的工程样机开发,加速推进深海滑翔机技术工程化,并研制出多种型号的深海滑翔机样机(如图4所示)。中国科学院沈阳自动化研究所研制的水下滑翔机分为深海和浅海两种类型,其技术指标如表1所示。

图4 2014年3~4月滑翔机性能评估海试参试样机
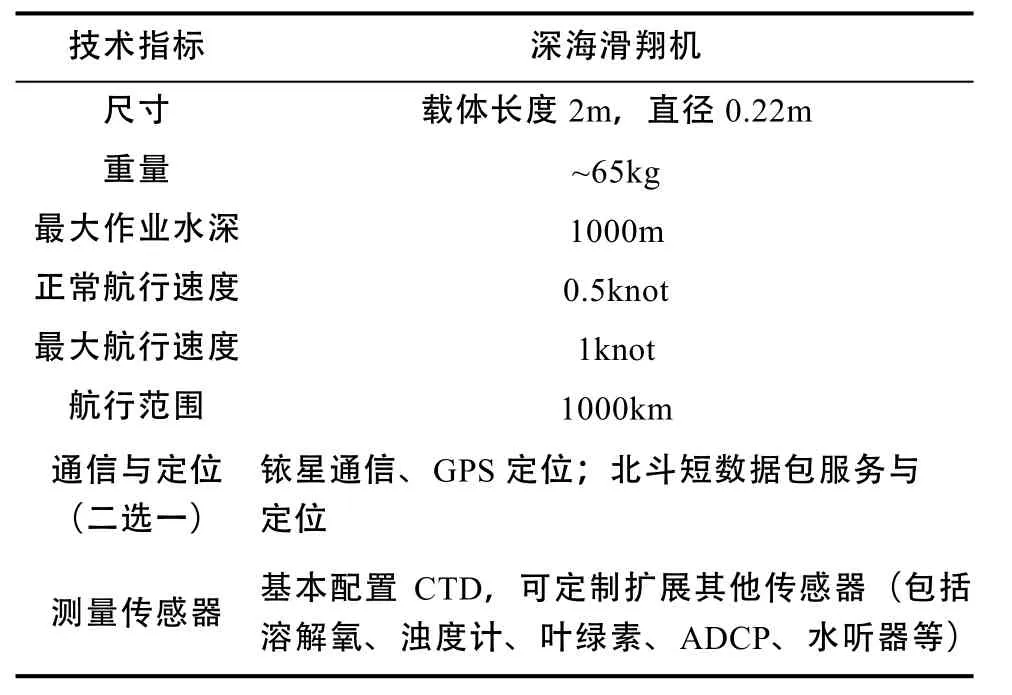
表1 水下滑翔机技术指标
在混合驱动和温差能驱动等新型水下滑翔机的研究工作方面,我国尚处于探索阶段。2005年,天津大学研制完成温差能驱动水下滑翔机原理样机,并成功进行了水域试验[9]。此外,上海交通大学也对温差能浮力驱动机理进行了研究[10]。天津大学在2009年研制了工作深度 500m,净重130kg的混合推进水下滑翔机 Petrel,并做了湖域测试[11]。2013年和2014年,混合推进滑翔机Petrel-II也在我国南海进行了初步的混合推进测试,具备了一定的技术基础。
近年来通过不断的努力和发展,支撑滑翔机发展的主要关键技术都取得了较大进步,滑翔机单体技术逐渐成熟,具备了应用基础。但是面向实际需求的滑翔机应用技术方面、多滑翔机编队和组网技术研究方面,我国还未开展先期研究,在一些混合推进、海洋环境能源利用方面,我国也仅进行了初步研究,与国外先进水平仍存在较大差距。
3 深海滑翔机技术应用
3.1国外深海滑翔机技术应用
随着水下滑翔机技术的不断成熟、应用面不断扩大,走在前列的滑翔机强国已经由单机技术向滑翔机网络转换,而基于滑翔机网络的观测更能体现水下滑翔机的优势。国际上几乎所有重要的海洋观测系统和海洋观测计划中,都存在滑翔机编队和网络构建的研究任务和应用试验。目前滑翔机观测网已经完成了多次示范,取得了显著成果,显示了滑翔机网络在海洋监测和探测方面的重要作用。
20世纪90年代开始,由美国海军研究院资助的自主海洋采样网(Autonomous Ocean SamplingNetwork,简称AOSN)启动,实验的目的是为了观测大范围近海和沿海区域内,各种重要海洋特性和海洋现象。AOSN分别于2000年、2003年和2006年在美国蒙特利海湾进行了一系列的海洋观测实验[12-14]。实验从验证平台的技术可行性到使用数台滑翔机结合海洋模式协同进行了观测,并且对多滑翔机的采样策略进行了系统的优化。通过ASAP试验,多水下滑翔机作为分布式、移动的海洋参数自主采样网络,在海洋环境参数采样中显示了卓越的优势和广阔前景。
美国海洋大气署主持的跨系统联邦计划IOOS (Integrated Ocean Observing System)非常重视滑翔机在海洋观测网中的作用。水下滑翔机网络在IOOS中的典型应用主要有以下两例:
1)应对突发事件。2010年4月20日美国墨西哥湾发生历史上最严重的石油泄漏。在此次灾难中,众多组织、企业和研究院校志愿组织布放了多台水下滑翔机对事发海域的温度、盐度和海流速度进行水下观测,如图5所示,为进一步确定泄露原油随海流运动的方向提供了重要的数据支持。在本次事件中,充分体现了水下滑翔机单机平台和多滑翔机网络系统具有其他观测设备无可比拟的优越性,同时具备可靠的应急响应能力。
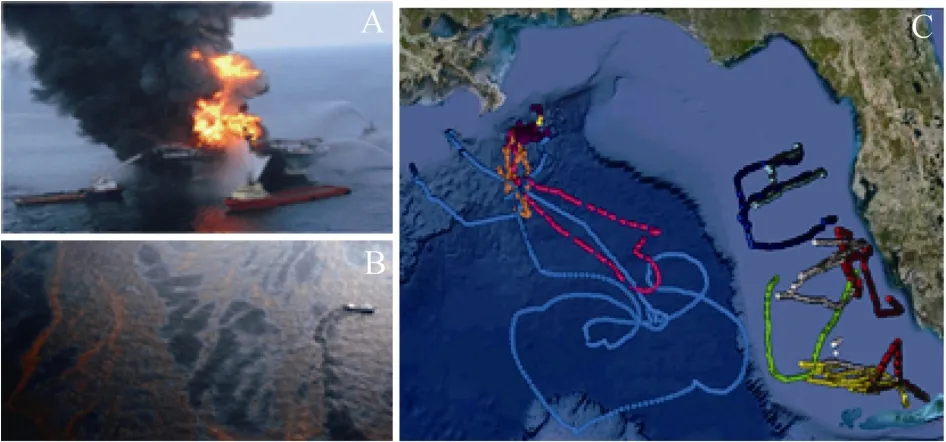
图5 (A)2010年4月21日墨西哥湾海上钻井平台燃烧图片;(B)2010年4月28日漏油情况空中拍摄图片;(C)水下滑翔机网络观测布放和运动轨迹
2)海洋特殊现象观测。自2005年,南加州近海观测系统SCCOOS(Southern California Coastal Ocean Observing System,IOOS子系统)在加利福尼亚南部海岸沿线布置滑翔机观测网。该网络通过采集海洋参数变化,研究其对内陆造成的影响。该网共使用4台Spray 水下滑翔机对南加州近海海域的温度、盐度、深度、叶绿素浓度和反向散射等参数进行采样。自2010年起,墨西哥湾观测系统GCOOS(The Gulf Coast Ocean Observing System,IOOS子系统)开始设计利用滑翔机网络进行赤潮观测。2012年秋季,GCOOS与南佛罗里达大学海洋科学学院和Mote海洋实验室合作,在佛罗里达大陆架利用水下滑翔机编队对Karenia brevis 藻类进行了观测研究,观测结果对研究埃克曼层底部上涌的上升流特性具有重要作用。
该计划在 2014年1月提出正式的《U.S. IOOS® National Underwater Glider Network Plan》[15],旨在搭建一个初步的滑翔机网络,建立数据管理和传输中心,提高滑翔机编队和数据管理能力。
由英国、法国、德国、意大利、西班牙和挪威等国家的科学家组成的欧洲滑翔观测站EGO[16](European Gliding Observatories Network,又称Everyone’s Gliding Observatories Network),主要目的是研究如何协调组织滑翔机编队实现全球性、区域性及近海岸等不同范围内的长期海洋观测任务。自2005年至2014年4月底,EGO共布放了大约300台次滑翔机执行各种海洋观测任务,滑翔机的布放如图6所示。

图6 EGSEX布放图
ANFOG[17](The Australian National Facility for Ocean Gliders)是澳大利亚IMOS综合海洋观测系统(Australia’s Integrated Marine Observing System)的子观测网,负责水下滑翔机编队的运行和维护。ANFOG的水下滑翔机编队可用来对澳大利亚周边海洋进行观测,目前滑翔机编队分布如图7所示。2012年至2013年,ANFOG共布放了包括Seaglider和Slocum在内的数十台水下滑翔机,共计执行超过150个调查任务。任务范围覆盖观测海域温度、盐度、海洋酸化和气候变异等,并完成了对大陆架海域的物理、化学、生物现象的观测和预报。

图7 澳大利亚近海滑翔机观测网络布放图
3.2 国内深海滑翔机技术应用
至2013年末,在各类科技计划资助下,我国已经开发出了多台水下滑翔机的样机,并进行了一系列湖试和海试研究,滑翔机技术有了长足的进步。随着水下滑翔机关键技术的掌握,我们也迈上了滑翔机应用的轨道。
2014年,中科院沈阳自动化研究所研制的“海翼号”深海滑翔机先后完成了3次海上试验,滑翔机海上累计工作天数达到80天,累计航程达到2400多公里,累计观测剖面数超过600个。多次海上试验全面考核了沈阳自动化所研制的滑翔机系统的可靠性和稳定性,为后期的推广应用打下了坚实基础。
2014年9—10月,“海翼号”深海滑翔机在南海结束了为期一个多月的海上试验,完成了多滑翔机同步区域覆盖观测试验和长航程观测试验。在长航程试验中,滑翔机海上总航程突破1000公里,达到1022.5公里,持续时间达到30天,获得229个1000米深剖面观测数据,本次实验中水下滑翔机的路径如图8所示。随后的实验数据处理发现[18],在这次实验区域发生了两次海洋上层水体混合层变冷的现象,第一次水体变冷发生在水面下1m处,此处的温度与水面相差将近1℃,根据卫星的数据显示,发生水体冷却的海面局部风速达到了4.2m/s。第二次是在4天里温度变化了1.7℃,卫星数据显示整个南海北部的风速达到了7m/s,同时混合层的深度激增到了30-60m。滑翔机的高精度数据为定量分析混合层冷却的原因提供了强有力的支持。

图8 水下滑翔机南海长航程试验观测轨迹
2015年3—4月,“海翼号”深海滑翔机在南海北部开展南海边界流观测应用(如图9所示),分别布放了1台浅海滑翔机和1台深海滑翔机。浅海滑翔机按照设定观测路径连续工作7天,获得了145个300米深剖面观测数据,航行距离180多公里;深海滑翔机按照设定观测路径连续工作25天,获得167个1000米剖面观测数据,航行距离740多公里。

图9 水下滑翔机2015年3—4月南海边界流观测轨迹
在2015年4月的“海翼号”深海滑翔机实验中,滑翔机提供的高精度水下0—1000m的温盐数据帮助科学家系统地分析了存在于南海北部的一个反气旋涡场的垂直结构(图10),定量地得到了涡场在水下的温度和盐度奇异值,以及涡场在水下部分的旋转速度。通过水团的分析确定该涡场来源于在台湾西南部脱离的黑潮水。
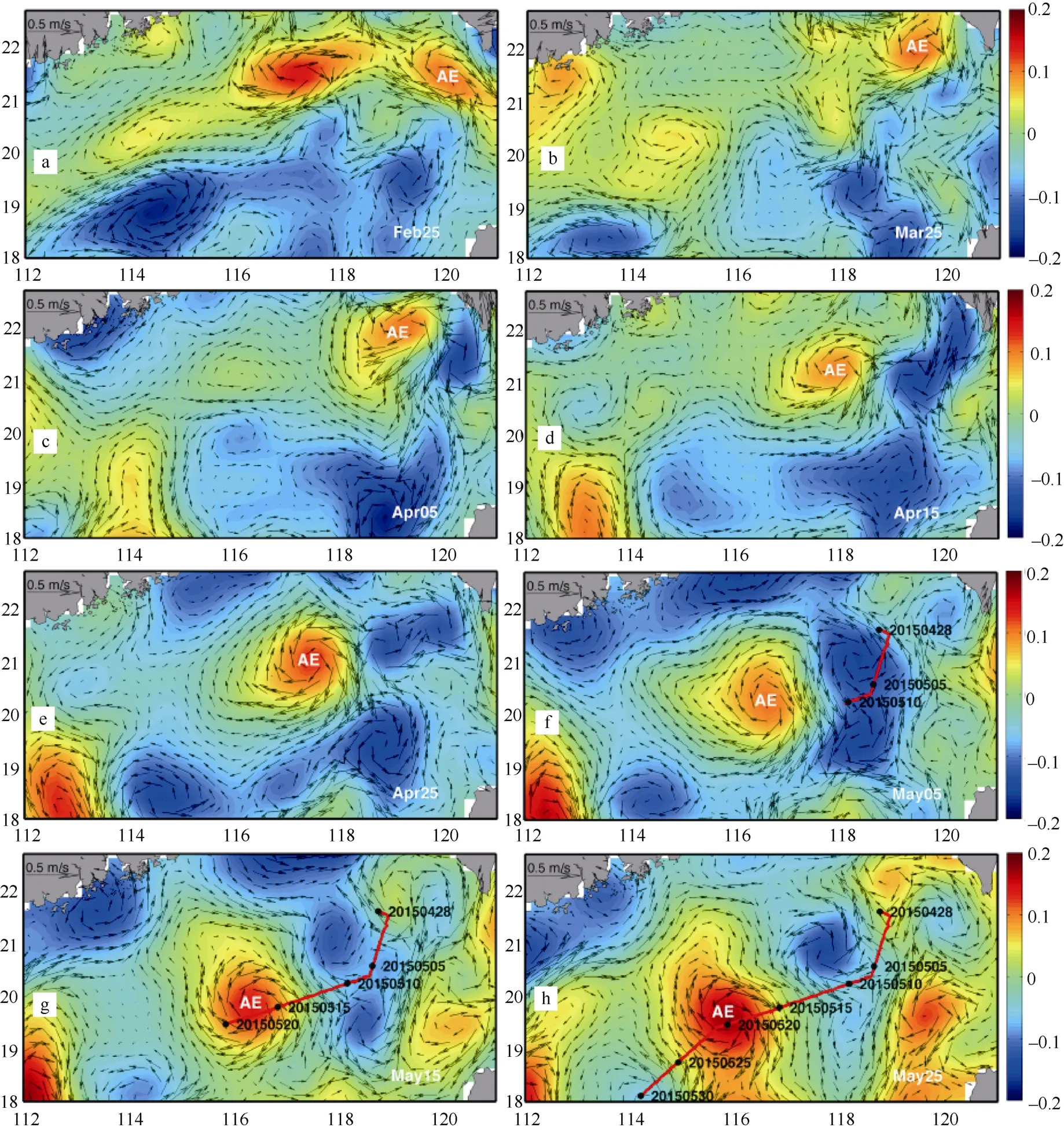
图10 卫星高度图显示的涡场随时间的变化,红色线段为滑翔机的轨迹
4 深海滑翔机技术发展趋势
当前在世界范围内,滑翔机的单机技术已经成熟,美国、法国均有多型滑翔机产品,实用性和可靠性通过大量的实际应用试验得到了充分验证。根据美国、澳大利亚、欧洲等国家和地区当前技术发展和研究热点分析,未来滑翔机的发展趋势主要集中在以下几个方面:
1)滑翔机单机技术成熟,拓展应用是其研究热点之一。当前在美国和法国,已经成功跨过滑翔机可靠性和工程化阶段,主要研究热点集中在通过装载和集成不同种类的传感器,拓展滑翔机的应用价值。水下滑翔机的功能很大程度上依赖于搭载的传感器,由于水下滑翔机本身重量和能耗的限制,其搭载的传感器受外形大小、海流干扰的限制,同时传感器在重量和能耗方面也具有严格的要求。针对滑翔机的使用条件,有些在传感器的体积、重量和能耗方面进行了专门的开发和改进,以实现与滑翔机的有效集成;有些则对滑翔机平台进行改进,以适于传感器的测量。
2)滑翔机观测网功能强大,编队与组网是重要发展方向。滑翔机网络大大扩展了单机探测的覆盖区域,同时可提供时变的次表层海洋物理、化学、生物、光学数据信息。鉴于滑翔机编队和组网能够有效拓展单机能力,具有更大的应用价值,是当前的研究热点和重要发展方向,各海洋强国均在大力发展相关技术。
3)混合推进滑翔机,当前技术发展新趋势。在强海流区,由于滑翔机运动速度慢(典型运动速度0.5knot),无法实现预定的航迹;同时由于滑翔机剖面运动形式固定,无法满足多样的海洋科学任务需求。为此,在美国、法国、加拿大等国,开展了螺旋桨推进与浮力驱动相结合的混合推进型滑翔机,以弥补当前滑翔机的不足,并取得了良好的应用效果。
4)特种滑翔机形式多样,在前沿技术上逐渐探索。在常规滑翔机之外,美国也开展了特殊滑翔机平台的研究,比较有代表性的为利用海洋环境能源驱动的滑翔机系统,包括利用海洋波浪能的波浪滑翔机、利用海洋温差能的温差能滑翔机等。当前波浪滑翔机已经达到实用水平,温差能滑翔机也开展了多次应用研究,显示了良好的应用前景。同时,美国军方结合滑翔机的声学应用,也开展了声学滑翔机XRay和ZRay的技术研究。此外,在极限潜深滑翔机、仿生滑翔机等方面,也有科研人员开展了先期研究,也是滑翔机技术的重要发展方向。
5 结束语
经过20多年的发展,深海滑翔机技术已经成熟,基于滑翔机的海洋观测应用也越来越广泛,全球几乎所有的大型海洋观测系统都使用过或正在使用水下滑翔机作为观测的重要成员。欧美国家和地区已经提出了用滑翔机覆盖全球海洋的宏大计划,水下滑翔机的应用将继续扩大。近些年,在国家的强力支持下,我国已经掌握了水下滑翔机的核心技术,开发了多种水下滑翔机样机,开展了多次湖试和海试。在滑翔机的应用和组网观测方面,我国正在进行积极的探索和有力的开展,水下滑翔机也将为我国周边海域的观测做出更多的贡献。
参考文献
[1] Yu J, Zhang A, Jin W, et al. Development and experiments of the sea-wing underwater glider[J]. China Ocean Engineering, 2011, 25: 721-736.
[2] 俞建成, 张奇峰, 吴利红 等. 水下滑翔机器人运动调节机构设计与运动性能分析[J]. 机器人, 2005, 27(5): 390-395.
[3] Webb D C, Simonetti P J, Jones C P. SLOCUM: An underwater glider propelled by environmental energy [J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 447-452.
[4] Sherman J, Davis R E, Owens W B, et al. The autonomous underwater glider “Spray” [J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 437-446.
[5] Eriksen C C, Osse T J, Light R D, et al. Seaglider: Along-range autonomous underwater vehicle for oceanographic research[J]. IEEE Journal of Oceanic Engineering,2001, 26(4): 424-436.
[6] http://www.acsa-alcen.com/robotics/seaexplorer
[7] Claus B, Bachmayer R, Cooney L. Analysis and development of a buoyancy-pitch based depth control algorithm for a hybrid underwater glider[C]. Autonomous Underwater Vehicles (AUV), 2012 IEEE/OES. IEEE, 2012: 1-6.
[8] Osse T J, Eriksen C C. The Deepglider: A full ocean depth glider for oceanographic research[C]//OCEANS 2007. IEEE, 2007: 1-12.
[9] 王延辉, 王树新, 谢春刚. 基于温差能源的水下滑翔器动力学分析与设计[J]. 天津大学学报:自然科学与工程技术版, 2007, 40(2):133-138.
[10] 倪园芳. 温差能驱动水下滑翔机性能的研究[D]. 上海交通大学, 2008.
[11] 武建国. 混合驱动水下滑翔器系统设计与性能分析[D].天津大学, 2010.
[12] Ögren P, Fiorelli E, Leonard N E. Cooperative control of mobile sensor networks: Adaptive gradient climbing in a distributed environment [J]. IEEE Transactions on Automatic Control, 2004, 49(8): 1292-1302.
[13] Fiorelli E, Leonard N E, Bhatta P, et al. Multi-AUV control and adaptive sampling in Monterey Bay[J]. IEEE Journal of Oceanic Engineering, 2006, 31(4): 935-948.
[14] Leonard N E, Paley D A, Davis R E, et al. Coordinated control of an underwater glider fleet in an adaptive ocean sampling field experiment in Monterey Bay [J]. Journal of Field Robotics, 2010, 27(6): 718-740.
[15] http://www.ioos.noaa.gov/glider/strategy/glider_network_ whitepaper_final.pdf
[16] http://www.ego-network.org/
[17] http://anfog.ecm.uwa.edu.au/
[18] Qiu C, Mao H, Yu J, et al. Sea surface cooling in the Northern South China Sea observed using Chinese sea-wing underwater glider measurements [J]. Deep Sea Research Part I: Oceanographic Research Papers, 2015,105: 111-118.
The Present State of Deep-sea Underwater Glider Technologies and Applications
Yu Jiancheng, Liu Shijie, Jin Wenming, Huang Yan
(Shenyang Institute of Automation, CAS, Shenyang 110016, China)
Abstract:Underwater gliders are a new type of underwater robots which are buoyancy-driven, moving up and down in the ocean without propeller system, so they tend to be applied to conduct marine environmental observations within long-time and large-range dimensions. In this paper, we give an overview of the system components of deep-sea underwater gliders on power, control, communication and detection, and also introduce the development and present state of deep-sea underwater glider technologies and applications in china and abroad. Taking Sea-Wing underwater gliders developed by Shenyang Institute of Automation as an example, we elaborate on the achievements on the platform technologies and scientific applications of deep-sea underwater gliders in recent years. Finally, combining with the present state of deep-sea underwater gliders, we analyze the core technologies and development tendencies, and we believe that deep-sea underwater gliders will have wide application and bright foreground in observation and networking in the waters surrounding our country in the near future.
Keywords:deep-sea underwater gliders; marine detection; covering observation; underwater vehicles
中图分类号:P72
文献标识码:A
文章编号:1674-4969(2016)02-0208-09
DOI:10.3724/SP.J.1224.2016.00208
收稿日期:2016-01-12; 修回日期: 2016-03-16
基金项目:中国科学院战略性先导科技专项,7000米级深海滑翔机(XDB06040200);国家自然科学基金,水下机器人海洋环境自主观测理论与技术(61233013)
作者简介:俞建成(1976-),男,博士,研究员,研究方向为水下机器人技术。E-mail: yjc@sia.cn
