
作业型无人遥控潜水器深海应用与关键技术
2016-06-22 09:12葛彤
工程研究-跨学科视野中的工程 2016年2期
关键词:深海
葛 彤
(上海交通大学,上海 200240)
作业型无人遥控潜水器深海应用与关键技术
葛彤
(上海交通大学,上海 200240)
摘要:深海作业无人遥控潜水器(ROV)是水下无人作业技术的典型代表。随着信息技术的进步,现代作业型ROV越来越成为具有智能和探测作业综合能力的水下工程支持装备,不仅是水下精细调查探测平台、水下复杂精细作业平台,而且将成为大型水下工程综合指挥平台的一部分。随着其总体技术和支撑技术的日趋成熟,未来的技术发展重点也将向以信息技术和特种作业技术为代表的协同技术转移,以适应其自身角色的转变。
关键词:深海;作业型无人遥控潜水器;水下工程
狭义上,无人遥控潜水器(ROV)是一类具有水下主动浮游运动能力的、通过脐带缆连接水下本体和水面监控动力站的无人遥控平台。用于深海水下工程的ROV绝大部分是作业型ROV (WROV),其脐带缆的动力传输能力一般在10—250hp之间。WROV不仅具有水下航行和探测设备搭载能力,而且搭载机械手和工具接口模块,具备水下操作和动力输出能力。根据传输功率的不同,作业型ROV又可分为轻作业型ROV (10—50hp),中等作业型ROV(50—100hp)和重作业型ROV(100—250hp)。
深海作业ROV是水下无人作业技术的典型代表,通过探讨其自身技术的进展及其在深海水下工程中承担角色的变化,可以了解深海水下作业技术的发展。本文尝试从宏观上探讨深海作业ROV的深海应用和关键技术。
1 应用和技术轮廓
1.1作业ROV的本质特点
缆控是作业型ROV系统的本质特点。完整的作业型ROV系统(图1)一般包括:ROV本体、水面监控动力站、中继设备和系缆、铠装脐带缆、深海布放系统、配套设备。因此,作业型ROV系统不仅仅是水下本体,而是横跨水面和水下的空间大系统,具有与海洋环境交互的复杂动力学。这是作业型ROV的重要特点之一。
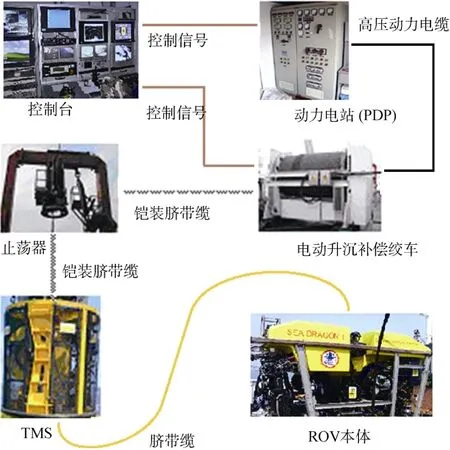
图1 海龙II深海作业ROV系统
脐带缆提供了作业型ROV强大且不间断的动力、以及水面系统与水下本体之间实时和高速的信息交互通道。这些特点赋予作业型ROV两个重要的能力优势:强作业能力和人工现场实时干预能力,使得母船操作人员可以通过作业型ROV本体实时感知现场环境和参与现场作业。这是作业型ROV的另一个重要特点。
作业型ROV的本体一般搭载光学声学探测设备、作业型机械手、综合的探测作业工具包,现代信息技术赋予了作业型ROV不断提高的环境感知、高级自动控制和自主决策能力。随着信息技术的进步,现代作业型ROV越来越发展成为具有强大信息收集和水下干预的水下工程综合支持装备。这是现代作业型ROV第三个重要的特点。
1.2技术体系
深海ROV系统涉及复杂的技术体系,这些技术总体上可以分为总体技术、支撑技术和配套技术三类(图2)。支撑技术包括深水结构与材料、液压动力与控制、电子电气、强电动力、深水推进等,是在部件和子系统层面,支持ROV系统实现的技术。配套技术是基于ROV平台的面向应用的关键技术,包括水下探测、定位、特种作业、信息综合管理和工程辅助决策等。总体技术则在ROV本体和全系统的层面,支持ROV系统的深水探测作业能力的实现。与自治潜水器(AUV)和载人潜水器不同,作业型ROV的总体技术与脐带缆密切相关,深海布放、运动控制和动力传输管理是其中最关键的技术环节。
1.3应用领域和地位
作业型ROV的本质特点决定了其成为海洋水下工程的核心装备,广泛支持各类典型深海水下应用,主要包括:
(1)海洋油气勘探开发;
(2)深海矿产资源勘探开发;
(3)深海调查研究和生物利用;
(4)深海打捞和应急处置。
在这些应用中,作业型ROV不仅表现出优良的深海精细调查探测能力以及通用的深海复杂精细作业支持能力,而且随着现代信息技术的发展,作业型ROV也越来越承担起水下工程组织者的角色(图2)。

图2 作业型ROV的应用和技术轮廓
2 深海应用
2.1深海精细调查探测
作业型ROV可以代替深海拖体和AUV完成海底精细调查和目标搜索任务。与深拖相比,ROV调查尺度小,精度更高。与AUV相比,其优点在于实时性好,调查信息可以实时上传进行处理。作业型ROV另一个重要的优势在于在进行预定的调查搜索任务时,可以实现随时的人工干预、开展预定任务以外的、和实施作业前难以预计的水下交互式任务,如目标确认、加密调查、取样和取证作业等。
2.1.1海底管线检测
海底管线面临复杂和多变的水下外部环境,包括海床地质、水流冲刷、海水电化学环境等自然因素,以及锚害等人为因素。海管外检测是海底管线维护的重要工作,一般包括常规检测和精细检测两个阶段[1]。
(1)常规检测:管线外部状态的快速评估。
(2)精细检测:在常规检测的基础上,对可疑区域或预定义点进行近距离的高分辨率成像检测和特征参数测量,检测的内容主要包括:
a)外部状态精细检测:光学成像、声学测量;
b)损伤腐蚀检测:无损探伤和阴极保护(CP)检测等。
海管检测中使用的支持装备如表1所示。常规检测一般采用拖曳式设备(ROTV)或AUV,搭载高频侧扫声纳执行,这种技术不支持精细检测。由ROV搭载检测设备进行管线巡检,其基本方式是ROV巡线航行,进行常规检测,在可疑点或预定义点悬停机动,采用灵活的方式实现精细检测(图3),因此,ROV巡检可以同时执行精细检测和常规检测,甚至可同时完成水下干预。目前,ROV管线巡检已经成为国际通行的海底管线检测之必要环节,ROV管线巡检技术则是海底管道安全保障所必需的核心技术之一。
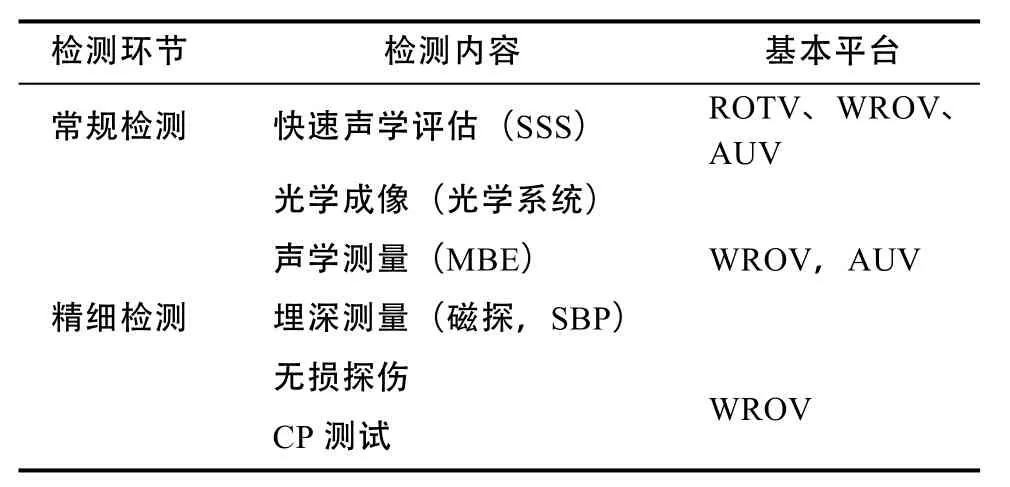
表1 海管检测的需求与一般方法

图3 ROV CP检测[2]
2.1.2区域精细调查和成图
在矿区勘探、水下救援等大量应用中,区域精细调查和成图是开展后续作业的基本准备。以多金属硫化物矿区调查为例,表2给出了鹦鹉螺公司在Solwara 1矿区开展调查的统计情况,从中可以看出ROV被大量使用,在深拖和AUV调查完成后,ROV精细调查和成图成为矿区调查的主要任务。
ROV主要搭载声学、光学、电磁设备,通过密集的梳形巡航,对选定矿区进行精细地形地貌探测,并在此过程中同步开展地质、生物、典型标志物观测、识别,甚至定点取样。绘制的矿区图[3]如图4所示,包括了地形地质、典型标志物如热液烟囱、火山岩、以及典型生物等,并与取样结果相对比和匹配。在成图过程中,需要水下和水面实时数据交换、测量和取样作业的相互配合、以及地质生物学家的现场参与,这是AUV和深拖都不具备的。
2.2深海精细和复杂作业
作业型ROV是完成深海精细和复杂作业的基本手段,用于水下作业时主要有3种形式,即基于机械手和小型工具的直接作业、搭载专用工具装备的特种作业、以及与大型作业装备的协同作业。在这些作业中,作业型ROV通过3种方式提供作业支持,分别是水下装备和工具的操作者、动力源、信号中继。
2.2.1深海热液硫化物矿区勘查取样
对于深海热液硫化物矿区,勘查取样主要包括表面取样和钻孔取样,主要用于对选定的矿区进行确认和资源评价。勘查取样要求具有较好的矿区覆盖性、一定的取样密度和精确的定点控制。传统的海底硫化物矿区确认过程主要采用3种勘查取样方式:拖网取样、ROV表面取样和钻机取样。拖网取样定位能力差,现在已经很少应用。钻机取样能力强,但是时间长,费用高,并且定位难度较高,因此大量用于矿区圈定后的资源详查中。ROV勘查取样由于其高效和高精度特点,已成为矿区确认中使用最广泛的取样方式。

表2 鹦鹉螺公司Solwara 1矿区调查的统计情况[3]

图4 Solwara 1矿区测量成图
鹦鹉螺矿业公司在2006年、2007年对Solwora 1硫化物矿区开展了大规模的勘查活动,使用的是Perry公司的Triton200 ROV,该ROV属于200hp的重作业型ROV。ROV表面取样目前最主要的方式是机械手取样,采用机械手(图5a)和必要的工具(图5b),大量地精确定点采集矿区的硫化物、岩石和沉积物样品[3]。
基于ROV的深海钻孔取样设备也获得有效的应用。图5c[3,4]为基于ROV的海底钻机,具有灵活性高、定位精确的特点,已经在硫化物矿区勘查中获得成功应用。
2.2.2水下生产系统回接(Tie-in)
海底复杂精细作业一般需要通过ROV和无人遥控作业工具(ROT,Remotely Operated Tools)组成的装备体系协同作业。前者是水下作业的平台和操作者,后者是水下作业的专用工具装备。
水下回接是水下生产系统安装的典型工序,其目的是实现流线和脐带缆与水下管汇的连接。深水回接需要使用作业型ROV配合专用作业装置共同实现。图6中示出的是FMC公司开发的ROVCON工具系统[5],搭载在作业型ROV下方,使用2个水下绞车和一组油缸机构,通过一系列操作,实现各类预铺设流线的回接和与管汇的连接。

图5 (a)机械手取样;(b)机械手抓持铲形工具取样;(c)ROV Drill

图6 ROVCON工具系统水下回接
2.2.3海底管线的维修抢修
深水管线维修抢修作业是另一类海底复杂精细作业的典型代表。图7是深水管线维修抢修中快速打卡作业[6]的示意图。专用维修工具携带维修卡具吊放至海管上方,在作业型ROV的辅助下实现对管和抱管。此后,ROV通过机械手将其液压接头和电气连接器与专用维修工具的控制面板连接,向专用维修工具提供动力源、信息传输通道,操作专用维修工具安装管线维修卡具。
显然,这种作业需要双缆布放,维修工具和ROV协同作业。对于更复杂的深水管线维修抢修则可能需要多ROV和多种工具协同作业。
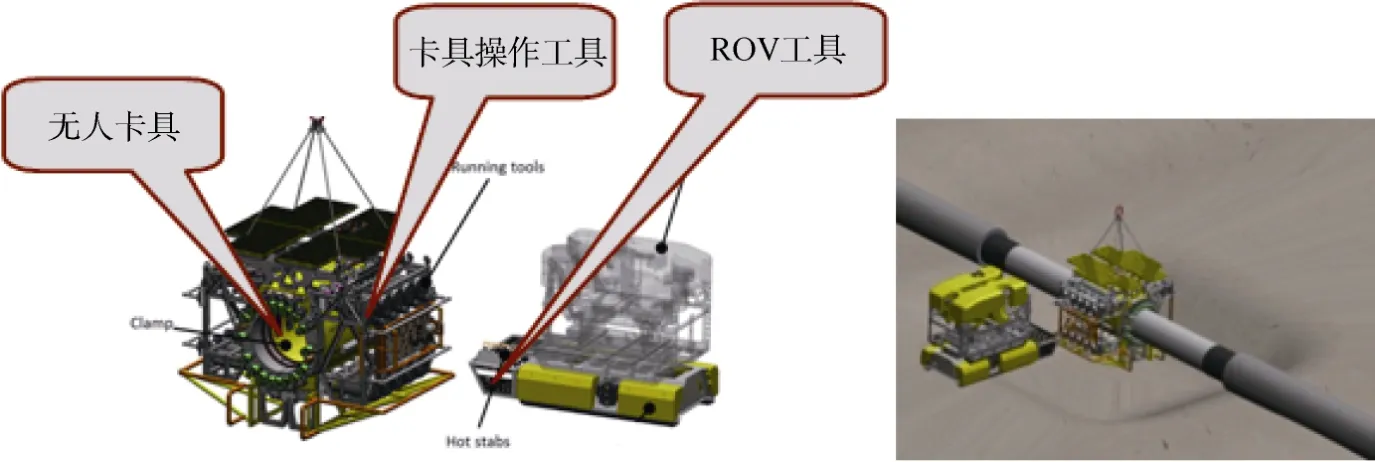
图7 快速打卡维修抢修作业
3 关键技术
3.1深海布放技术
如前所述,深海ROV系统是横跨水面和水下的复杂的大系统,具有与海洋环境交互的复杂动力学。深海布放不仅关系到ROV水下作业的安全性,而且直接影响其水下作业的性能。
根据具体的应用需求,作业型ROV通常具有3种典型的深海布放形式(图8)。

图8 海龙II布放形式:(a)中继布放;(b)直接布放;(c)直接布放时加装浮球
(1)直接布放
ROV本体直接连接铠装脐带缆布放至深海作业深度。由于铠装脐带缆具有较大的水中重量,为了保证ROV具有一定的水下航行能力,必须在脐带缆根部加装浮力球。这种布放方式的优点是系统环节少,不需要水下对接,在海况恶劣时系统具有较高的安全性,缺点是脐带缆对ROV的水中航行的灵活性和稳定性造成一定的影响,并且ROV围绕母船的活动半径较小。因此,这种布放模式主要用于深远海科学研究、资源勘查和水下救援等领域。
(2)中继器布放
中继器上安装有系缆绞车和ROV对接装置,通过铠装脐带缆连接母船,ROV则通过轻质系缆连接中继器。由于系缆是轻质复合缆,ROV运动受系缆影响小,操纵灵活,并具有较大的活动半径。目前,商业级作业ROV的系缆长度可以超过500米,因此可以有效支持管线铺设、钻井支持等需要大的ROV活动半径的应用领域。
(3)中继重块布放
这种布放方式是前两种方式的折中,中继重块通过铠装脐带缆连接母船,ROV则通过轻质系缆连接中继重块。由于中继重块上没有绞车,ROV的活动半径较小,但灵活性得以保证。
中继器布放的缺点是存在ROV和中继器水下对接和分离的过程,在海况恶劣时,水面升沉会影响对接安全性。为了提高作业安全性,在深海中继布放方案中,一般需要应用升沉补偿技术。典型的主动升沉补偿采用高速大功率绞车,通过反馈母船升沉稳定中继器垂向,其控制结构如图9所示。主动升沉补偿技术使得中继器布放模式越来越多地应用于深海勘探和救援领域。

图9 海龙II主动升沉补偿控制原理
3.2运动控制
早期的ROV通常只有自动定向定深等简单的自动控制功能。在深水应用中,脐带缆的干扰是ROV本体实现水下航行的主要干扰力,海流的干扰又会被脐带缆进一步放大,严重影响水下操纵效果。对于精细调查任务或是精细作业任务而言,深水ROV的精细控位和循线能力都是必要的。海龙II ROV是较早配置ROV控位系统的ROV(图10),通过对脐带缆干扰力以及海流干扰力的估计和预测,补偿水下推力分配,可以实现较好的循线效果。目前ROV自动循线控制系统已成为国际高端ROV的标准配置。

图10 海龙II ROV精细循线控制策略
3.3 动力传输与管理
对于深海作业型ROV,脐带缆所能传输的动力是影响ROV性能的主要瓶颈因素,如何高效使用和分配动力是深海ROV特有的问题。
(1)电动vs液压
从动力的使用形式上,目前深海作业型ROV主要有电动和液压两类方式。液压ROV首先将来自脐带缆的强电动力转换为液压动力,再分别驱动推进和作业系统。电动型ROV则直接采用强电动力实现推进驱动,另配专用的作业液压泵站驱动作业工具。
一般地,增加电液转换环节会使动力使用效率损失近20%,而直接采用强电动力实现推进驱动可以提高动力使用效率,这是电动ROV的重要优势。但另一方面,电动ROV的推进和作业采用不同的动力形式,使其在推进和作业两套系统中难以根据需求实时分配动力,因此电动ROV更适合在轻作业级ROV中使用,而中等作业和重作业级ROV目前仍普遍使用液压动力。
(2)推进vs作业
对于中等作业和重作业级ROV,其动力的主体并不是用于抗流,而是用于产生足够的牵引力和用于作业工具驱动。根据作业需求不同,动力在推进和作业系统中的分配比例可大范围调节。传统的作业型ROV有三种液压动力配置,分别是单机单泵、双机双泵和单机双泵。单机单泵系统采用一台电机带动主泵站,同时提供推进和作业动力,其缺点是对于重载作业而言,由于推进系统和作业系统的液压油洁净度要求不同,需要串联隔离泵站,造成作业动力的效率损失。双机双泵系统采用完全独立的推进泵站和作业泵站,较好地解决了串联隔离泵站的问题,但双电机构形使系统重量增大。单机双泵构形是一种效率最高的动力构形,由双出轴电机同时驱动推进泵和作业泵。一般地,电机功率与脐带缆动力传输能力相匹配,推进泵和作业泵的单台功率都可接近电机输出功率,通过对推进泵和作业泵输出功率的控制,能够实现对脐带缆传来的强电动力的合理分配。
(3)动力传输
脐带缆发热和压降是制约强电动力输送能力的主要因素。提高电压可以有效提高动力输送能力。对于4000米以浅的作业型ROV,目前广泛采用3300V送电电压,而对于更大深度的作业型ROV,一般必须采用4000V送电。
4 水下工程综合指挥平台
现代水下工程越来越体现出多工序、多装备系统作业的特点,作业型ROV由于其固有的技术特点,也将越来越多地承担起水下作业综合指挥和协同的角色,其主要的作用为:
(1)作业现场信息的综合采集;
(2)信息实时处理和辅助决策;
(3)水下作业探测装备的辅助操作;
(4)多工序的辅助连接。
2002年,携带77000吨燃油的威望号油轮在西班牙西北方海区沉没,遇难区域水深4000米。在威望号油轮的应急抢险工程(图11)中,最多时同时使用了4台作业型ROV[7,8],负责工程中各工序的衔接、装备的辅助。主要的任务包括:沉船调查、泄漏封堵、油位测量、间隙测量、热开孔、阀门安装与操作、布放监测、作业监测。所有的信息被统一存储和处理,并通过多ROV实现各工序的综合管理。该工程获得了2004年Platts Global Energy Award著名能源工程奖,集中体现了作业型ROV在深海水下工程中的核心作用。

图11 威望号燃油回收工程
5 结论
在深海水下工程中,作业型ROV承担着多种角色。它不仅仅是精细作业平台、精细调查平台,更是大型水下工程综合协调指挥平台的一部分。随着水下作业越来越复杂,使用的水下装备越来越多,作业型ROV也越来越多地承担起现场协调指挥者的角色,其主要职责包括现场信息获取、水下装备操控以及将复杂的装备体系和作业工序有效地衔接。
随着作业型ROV系统的总体技术和支撑技术日趋成熟,作业型ROV未来的技术发展重点也将向信息技术和特种作业装置的协同技术转移,以适应其自身角色的转变。
参考文献
[1] Clive Anderson Stolt Offshore. PIPELINE INSPECTION,2005, http://www.ths.org.uk.
[2] Fugro Survey Ltd. FUGRO ROTV INSPECTION - The Hydrographic Society, 2012, http://www.ths.org.uk.
[3] L. Lipton. Mineral Resource Estimate,Solwara Project,Bismarck Sea, PNG, Technical Report, 2012.
[4] A. Spencer. ROVDRILL®-The development and application of a new rov operated seabed drilling and coring system[C]. Proceedings of the 6th International Offshore Site Investigation and Geotechnics Conference: Confronting New Challenges and Sharing Knowledge, 2007.09.11-09. 13, London, UK.
[5] FMC Technologies, ROVCON® Tie-in System, 2009,http://www.fmctechnologies.
[6] TDW Offshore Services, Subsea Clamp Installation Tool,2013, http://www.tdwoffshore.com.
[7] R. Hernan etc. The Prestige Wreck Fuel Recovery Project,OTC-2005, No 17534.
[8] J Ewan, D. Robertson etc. Work Class ROVs for Operations in 4000 Meters of water depth. Prestige Wreck Fuel Recovery Project, OTC-2005, No 17538.
Application and Technology of Deep Sea Work-Class ROV
Ge Tong
(Shanghai jiaotong university, shanghai 200240, China)
Abstract:Deep sea work-class ROVs (Remotely Operated Vehicles) are typical representation of the unmanned underwater working system. With the advancement of information technology, modern work-class ROVs are increasingly developing into smart underwater instruments with integrated capability of detection and operation. They not only are platforms of underwater investigation and detection, and platform of sophisticated underwater operation, but also will be part of the integrated command platform for underwater engineering. With their supporting technology maturing, future technological development will focus on the information technology and the collaborative technology with multi-equipment system.
Keywords:deep sea, work-class ROV, underwater engineering
中图分类号:P71
文献标识码:A
文章编号:1674-4969(2016)02-0192-09
DOI:10.3724/SP.J.1224.2016.00192
收稿日期:2016-01-09; 修回日期: 2016-03-09
作者简介:葛彤(1971-),男,博士,教授,研究方向为水下工程与技术。E-mail: tongge@sjtu.edu.cn
猜你喜欢
百科探秘·海底世界(2021年8期)2021-08-03
中学生数理化·八年级物理人教版(2021年4期)2021-07-22
青少年科技博览(中学版)(2020年2期)2020-05-21
小哥白尼(趣味科学)(2019年7期)2019-11-16
中学生数理化·八年级物理人教版(2018年5期)2018-06-21
小猕猴智力画刊(2018年5期)2018-05-25
小哥白尼(趣味科学)(2018年2期)2018-05-25
学苑创造·A版(2017年4期)2017-05-13
学苑创造·A版(2017年5期)2017-05-09
琴童(2016年6期)2016-05-14
