基于坐标变换的合成孔径雷达高精度成像算法
2016-06-22 06:30:32邢涛胡庆荣李军王冠勇
电波科学学报 2016年2期
关键词:高精度
邢涛 胡庆荣 李军 王冠勇
(北京无线电测量研究所,北京 100854)
基于坐标变换的合成孔径雷达高精度成像算法
邢涛胡庆荣李军王冠勇
(北京无线电测量研究所,北京 100854)
摘要针对当前合成孔径雷达成像算法处理低频大斜视角数据存在的散焦和运算量大问题,提出了一种新的高精度大斜视合成孔径雷达成像算法.算法首先把数据录取坐标系数据变换到零多普勒坐标系数据,然后在零多普勒坐标系中采用距离时域非均匀傅里叶变换去除距离、方位的耦合,进而得到聚焦良好的合成孔径雷达图像.算法运算量与距离多普勒算法在一个量级,具有较高的成像效率.仿真结果表明算法在低频大斜视角下能很好地聚焦,从而验证了算法的正确性.
关键词合成孔径雷达;高精度;零多普勒坐标系;数据录取坐标系
引言
合成孔径雷达(Synthetic Aperture Radar, SAR)用于侦察、测绘时一般都采用正侧视,波束指向飞行方向的正侧方.有些应用情况下需要将波束作大角度斜视,比如战斗机、轰炸机需要观察前方情况[1-2],还有些人造目标必须在一定视角下观察[1-3].斜视成像在实际应用中具有很高的灵活性,它具有许多正侧视SAR无法实现的功能,研究大斜视条件下的成像方法是很有意义的.大斜视SAR存在较为复杂的成像几何模型,回波数据的方位向和距离向的耦合较为严重,因此,大斜视SAR成像是雷达信号处理中一个重大的挑战.
低频段具有很强的穿透特性,能够对隐藏在树林或地下的各种目标(如卡车、火炮、导弹发射架、地雷等)进行高分辨率成像.文献[1-2]表明,瞬时斜距泰勒展开二阶以上偏移相位与波长成正比,现有处理条带模式的成像算法一般都不能处理低频段大斜视角数据[3].常用的简单距离多普勒算法最多只能处理5°左右斜视数据,且精度较低[4-7].线性调频变标(Chirp Scaling, CS)[8-9]类算法一般在L波段处理斜视角的数据不超过35°.后向投影(Back Projection, BP)[10-11]算法和距离徙动算法(Range Migration Algorithm, RMA)[10,12]虽然能处理大斜视角的数据,但共同的缺点是需要进行复数插值操作,运算量很大.
非均匀傅里叶变换[13]在波束形成[14-15]、图像处理、雷达成像等领域得到了广泛应用.针对现有算法不能很好处理低频大斜视角SAR数据的问题,提出了一种基于距离时域非均匀傅里叶变换的新成像算法.该算法首先把数据录取坐标系中录取的斜视角数据变换到零多普勒坐标系,然后利用距离时域非均匀傅里叶变换去除距离、方位的耦合,获得了较好的成像质量.仿真结果表明,L波段时,算法在50°斜视角时仍能很好地成像.算法运算量与距离多普勒(Range Doppler, RD)算法运算量在一个量级,具有较高的成像效率.
1理论分析
雷达瞬时斜距示意图如图1所示,斜视角为θ,载机速度为V.图中定义了两个坐标系[1]BAD和BAA1.两个坐标系的X轴方向(航向)是相同的,Y轴方向则不同.坐标系BAD是零多普勒坐标系,在该坐标系下点目标P的坐标为(Rb,Xb).坐标系BAA1是数据录取坐标系,在该坐标系下点目标P的坐标为(R,X).

图1 雷达瞬时斜距示意图
点目标坐标在这两个坐标系间的变换关系为

(1)
在tm时刻,数据录取坐标系中,天线相位中心与点目标的瞬时斜距为

(2)
接收的回波的基频信号为

s(^t,tm)= expjπγ^t-2R(tm)cæèçöø÷2æèçöø÷×
(3)


(4)
同理,根据式(1)及式(2),零多普勒坐标系中瞬时斜距为

(5)
两种坐标系中方位“慢时间”相同.把式(4)代入式(3)得

s(^tb,tm)= expjπγ^tbcosθ-2R(tm)cæèçöø÷2æèçöø÷×
(6)
令fr为数据录取坐标系中距离频率,fa为方位频率,零多普勒坐标系中距离频率为

(7)
定义:

(8)

s(Fr,tm)= exp-jπF2rcos2θγæèçöø÷×

(9)

s(Fr,fa)= exp-j2πfaXbVæèçöø÷×exp-j2π2Rbcæèç
(10)
把式(8)代入式(10)得

s(Fr,fa)= exp-j2πfaXbVæèçöø÷×

(11)


s(^tb,tm)= sincΔfatm-XbVæèçöø÷éëêêùûúú×

(12)
由上述推导可以发现,算法成像过程不存在近似处理,不存在斜距及耦合频率项泰勒展开处理[1-2]近似误差.式(12)的成像结果在零多普勒坐标系中距离和方位是分离的,不存在几何形变,无须几何校正.
2算法实现
算法实现时,由于式(8)中开根号的非线性操作,与均匀frb和fa对应的Fr是非均匀的,式(6)的傅里叶变换的离散形式为非均匀的,等效形式如式(13)所示:

(13)
式(13)不能采用快速傅里叶变换(FastFourierTransform,FFT)计算.文献[13]给出式(13)快速计算方法,称为非均匀快速傅里叶变换(Non-UniformFastFourierTransform,NUFFT).当点数为N时,
NUFFT与FFT操作次数之比[13]为

(14)
算法流程如图2(a),以文献[11]中时域校正线性距离走动并频域校正弯曲的距离-多普勒算法为参考算法,参考算法流程如图2(b),仿真时式(14)中取c=2,K=7,设距离向点数为N,方位向点数为M.所提算法与参考算法操作次数比如图3所示.
图3表明:方位向点数M越大,所提成像算法操作次数与参考算法操作次数之比越小.随着距离向点数N的增多,所提成像算法操作次数与参考算法操作次数之比越趋近于一个稳定值,大约在1.5左右,即所提算法运算量与RD算法运算量在一个量级.

(a) 所提算法

(b) 参考算法图2 算法成像流程

图3 所提算法与参考算法操作次数比
式(8)表明:距离非均匀频率Fr是方位频率fa的函数,即“距离频率Fr”依托于“方位频率fa”存在,因此,图2(a)中先进行“方位FFT”处理,再进行“距离NUFFT”处理.在算法原理推导时,先“距离NUFFT”再“方位FFT”是为了可以显式表示每一步的结果.
在图2(a)中,“距离NUFFT”操作对应式(6)到式(9)的变换过程.工程中都是离散数据,离散数据“距离NUFFT”采用离散形式式(13)实现.“距离脉压”为:

(15)
在式(9)两边乘以式(15),即完成距离脉压操作.此处的距离脉压与RD算法中的距离脉压有区别.脉压之后为表达式式(11),此时距离、方位相互独立,再分别IFFT即得到SAR图像,如式(12)所示.
3仿真校验
文献[1]指出,改进CS算法与时域校正距离走动的改进RD算法具有同等的成像精度,限于篇幅,文中只仿真时域校正距离走动的改进RD算法与所提算法在低频大斜视下的成像结果以进行对比,且改进RD算法选取时域校正线性距离走动并频域校正弯曲的距离-多普勒算法,流程如图2(b)所示,仿真参数如表1所示.
仿真中,共设置了8个点目标,点目标相对于中心点目标距离和方位的坐标分别为:(30,-30),(30,30),(-30,30),(-30,-30),(100,50),(100,-50),(-100,50),单位为m.斜视角从0°~50°均匀变化,仿真结果如图4~图9所示.图4~图9表明:在仿真系统参数下,时域校正线性距离走动并频域校正弯曲的距离-多普勒算法在10°斜视角时能较好成像,随着斜视角的增大,距离、方位耦合旁瓣越来越高,成像效果变差.所提算法在0°~50°斜视角下均能很好地成像,成像结果的十字形轮廓很明显.

表1 仿真参数

(a) 所提算法 (b) 参考算法图4 斜视角为0°时的图像(轮廓:-30 dB)

(a) 所提算法 (b) 参考算法图5 斜视角为10°时的图像(轮廓:-30 dB)

(a) 所提算法 (b) 参考算法图6 斜视角为20°时的图像(轮廓:-30 dB)

(a) 所提算法 (b) 参考算法图7 斜视角为30°时的图像(轮廓:-30 dB)
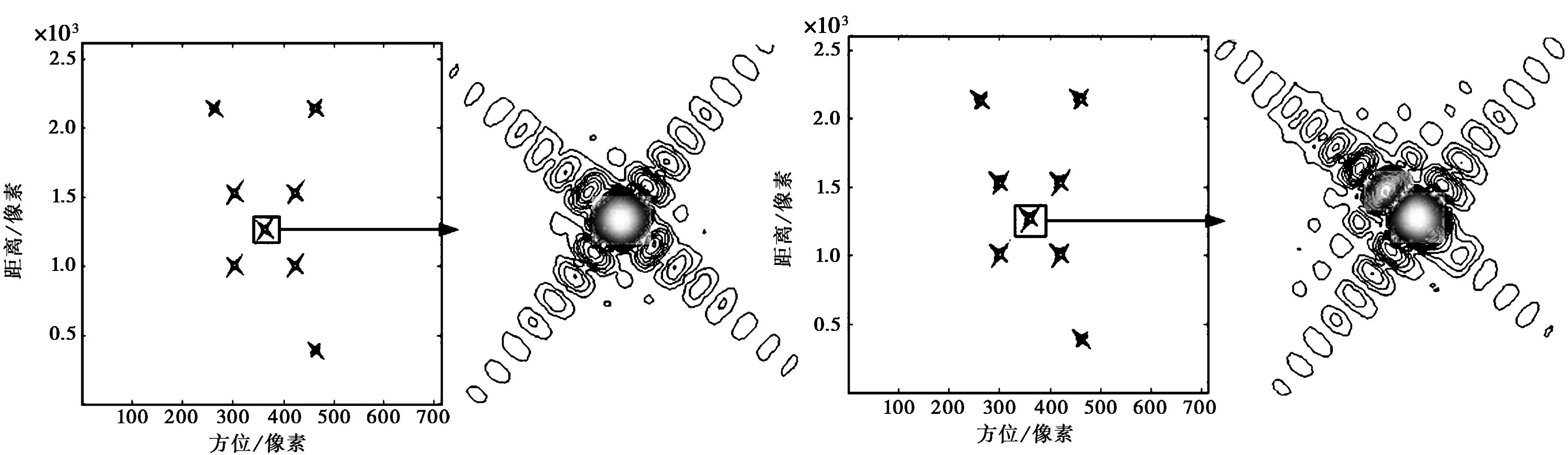
(a) 所提算法 (b) 参考算法图8 斜视角为40°时的图像(轮廓:-30 dB)

(a) 所提算法 (b) 参考算法图9 斜视角为50°时的图像(轮廓:-30 dB)
图4~图9中所提算法点目标成像结果位于真实位置,不存在旋转现象,参考算法图像为经过几何校正后的结果,校正前图像存在绕中心目标旋转现象,40°斜视角时校正前的成像结果如图10所示.

图10 参考算法成像旋转现象

图11表明:点目标间距离和方位间距分别与实际值相同,表明像素长度的设置是正确的,也验证了算法成像目标间不存在几何形变.
图12、图13给出了斜视角40°时所提算法和参考算法对中心点目标成像的距离、方位剖面图.中心目标斜视冲激响应宽度(Impulse Response Width, IRW)如表2所示,峰值旁瓣比(Peak Sidelobe Ratio, PSLR)如表3所示,积分旁瓣比(Integrated Sidelobe Ratio, ISLR)如表4所示.

(a) 所提算法 (b) 参考算法图11 斜视角40°时点目标成像

(a) 所提算法 (b) 参考算法图12 斜视角为40°时的距离剖面图

表2 中心目标冲激响应宽度

(a) 所提算法 (b) 参考算法图13 斜视角为40°时的方位剖面图

斜视角/(°)01020304050距离维PSLR/dB所提算法-13.26-13.54-14.82-21.12-25.90-26.29参考算法-13.26-13.40-16.98-20.97-21.29-16.34方位维PSLR/dB所提算法-13.20-13.90-16.83-23.73-26.35-22.99参考算法-13.10-12.75-13.86-18.20-20.11-17.36

表4 中心目标积分旁瓣比
表1系统参数下,正侧视时距离、方位分辨率均为1.5 m.定义不同斜视角时冲激响应展宽比(Impulse Response Width Ratio, IRWR)为冲激响应宽度/正侧视分辨率,所提算法和参考算法在不同斜视角下的IRWR如图14所示.
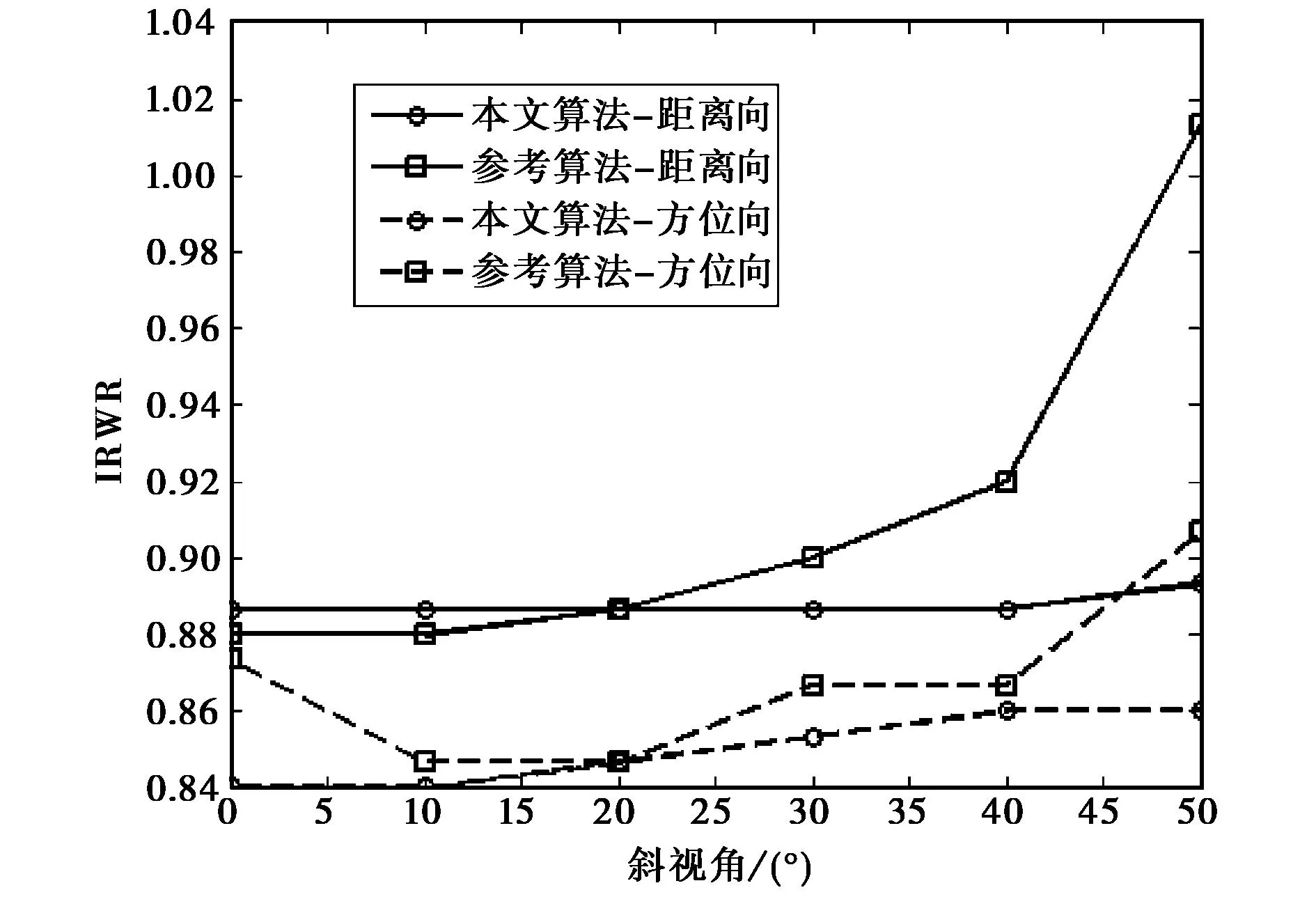
图14 不同斜视角时冲激响应展宽系数
表2、图14表明:所提算法距离、方位冲激响应宽度一直比较稳定,随斜视角变化比较小,近似于正侧视时的冲激响应宽度.表明所提算法距离、方位分辨率与斜视角无关,对斜视角变化鲁棒性较强.参考算法距离、方位冲激响应宽度总体上随着斜视角增大而增大,距离、方位分辨率随着斜视角增大而降低.表3、表4表明:斜视角在20°以上时,所提算法峰值旁瓣比和积分旁瓣比较参考算法优势比较明显.
4结论
针对现有成像算法处理低频大斜视角数据存在的问题,提出了一种新的成像算法.算法首先把数据录取坐标系录取数据变换到零多普勒坐标系,然后在零多普勒坐标系中采用距离时域非均匀傅里叶变换去除距离、方位的耦合,进而得到聚焦良好的SAR图像.所提算法运算量与RD算法在一个量级,具有较高的成像效率.L波段仿真结果表明,50°斜视角时所提算法仍能很好地聚焦,从而验证了所提算法的正确性.综上,该算法为低频大斜视角SAR数据处理提供了一种新的思路和解决途径.
参考文献
[1] AN D X,LI Y H, HUANG X T, et al. Performance evaluation of frequency-domain algorithms for chirped low frequency UWB SAR data processing[J]. IEEE journal of selected topics in applied earth observations and remote sensing, 2014, 7(2): 678-690.
[2]王海鹏, 金亚秋. 极化雷达图像目标相干系数判据的检测研究[J]. 电波科学学报, 2014, 29(3): 408-411.
WANG H P, JIN Y Q. Target detection algorithm by coherence coefficient criteria of polarimetric SAR imag [J]. Chinese journal of radio science, 2014, 29(3): 408-411. (in Chinese)
[3] AN D X, HUANG X T, JIN T, et al. Extended nonlinear chirp scaling algorithm for high-resolution highly squint SAR data focusing[J]. IEEE transactions on geoscience and remote sensing, 2012, 50(9): 3595-3609.
[4] 孟藏珍, 许稼, 花良发, 等. 基于接收滤波器设计的MIMO-SAR波形耦合抑制[J]. 电波科学学报, 2014, 29(3): 401-407.
MENG C Z, XU J, HUA L F, et al. MIMO-SAR waveform coupling suppressing based on design of receiving filter [J]. Chinese journal of radio science, 2014, 29(3): 401-407. (in Chinese)
[5] CHANG C Y, JIN M, CURLANDER J C. Squint mode SAR processing agorithms[C]//the 12th Canadian Symposium on Remote Sensing. Vancouver, July 10-14, 1989.
[6] SMITH A M. A new approach to range-doppler SAR processing [J]. International journal of remote sensing, 1991(12): 235-251.
[7] XING M D, WU Y F, ZHANG Y D, et al. Azimuth resampling processing for highly squinted synthetic aperture radar imaging with several modes[J]. IEEE transactions on geoscience and remote sensing, 2014, 52(7): 4339-4352.
[8] 庞礴, 王雪松, 代大海, 等. 基于数字波束锐化的高速前视合成孔径雷达成像算法[J]. 电波科学学报, 2014, 29(1): 92-97.
PANG B, WANG X S, DAI D H, et al. Imaging algorithm of high velocity forward-looking SAR based on digital beam sharpening [J]. Chinese journal of radio science, 2014, 29(1): 92-97. (in Chinese)
[9] AN D X, LI Y H, HUANG X T, et al. Performance evaluation of frequency-domain algorithms for chirped low frequency UWB SAR data processing[J]. IEEE journal of selected topics in applied earth observations and remote sensing, 2014, 7(2): 678-690.
[10]FRÖLIND P O, ULANDER L M H. Evaluation of angular interpolation kernels in fast back-projection SAR processing[J]. IEE proceedings radar, sonar and navigation, 2006, 153(3): 243-249.
[11]保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京:电子工业出版社, 2005:173-177.
[12]FOURMONT K. Non-equispaced fast Fourier transforms with applications to tomography[J]. The journal of Fourier analysis and applications, 2003, 9 (5): 431-441.
[13]邢涛, 胡庆荣, 李军, 等. 基于非均匀FFT的超宽带合成孔径雷达高效成像算法[J]. 系统工程与电子技术, 2015, 37(2): 291-296.
XING T, HU Q R, LI J, et al. Efficient imaging algorithm based on non-uniform fast Fourier transform for ultra-wide band synthetic aperture radar [J]. Systems engineering and electronics, 2015, 37(2): 291-296. (in Chinese)
[14]WANG Y, LI J W, CHEN J, et al. A parameter-adjusting polar format algorithm for extremely high sqint SAR imaging[J]. IEEE transactions on geoscience and remote sensing, 2014, 52(1): 640-650.
[15]HE X Y, ZHOU X Y, CUI T J. Fast 3D-ISAR image simulation of targets at arbitrary aspect angles through non-uniform fast Fourier transform (NUFFT)[J]. IEEE transactions on antennas and propagation, 2012, 60 (5): 2597-2601.
[16]WEN B, ZABARAS N. An image-based method for modeling the elasto-plastic behavior of polycrystalline microstructures based on the fast Fourier transform[R]. Ithaca: Cornell University, 2013.
High precision imaging algorithm for synthetic aperture radar based on coordinate conversion
XING TaoHU QingrongLI JunWANG Guanyong
(BeijingInstituteofRadioMeasurement,Beijing100854,China)
AbstractNew high precision imaging algorithm for low-frequency high squint synthetic aperture radar (SAR) is proposed in this paper for existed SAR algorithms with the problems of defocusing and heavy calculation. The proposed algorithm transforms the SAR data from acquisition Doppler geometry to zero Doppler geometry and then operates ununiform fast Fourier transform (FFT) in range-time domain data to decoupling between range and azimuth. The SAR images focus well after above operations. The computational burden of the proposed algorithm is in the same level as range Doppler(RD) algorithm and has high imaging efficiency. Simulations verify that the proposed algorithm focus well in low frequency high squint SAR. The results demonstrate the correctness of the proposed algorithm.
Keywordssynthetic aperture radar; high precision; zero Doppler geometry; acquisition Doppler geometry
收稿日期:2015-05-01
中图分类号TN957
文献标志码A
文章编号1005-0388(2016)02-0368-08
DOI10.13443/j.cjors.2015050101
作者简介
邢涛(1986-),男,湖北人,北京无线电测量研究所博士研究生,研究方向为雷达成像技术.
胡庆荣(1974-),男,河北人,北京无线电测量研究所副所长,博士,研究方向为雷达成像技术.
李军(1982-),男,湖北人,北京无线电测量研究所高级工程师,博士,研究方向为雷达成像技术.
王冠勇(1989-),男,天津人,北京无线电测量研究所博士研究生,研究方向为雷达成像技术.
邢涛, 胡庆荣, 李军, 等. 基于坐标变换的合成孔径雷达高精度成像算法[J]. 电波科学学报,2016,31(2):368-375. DOI: 10.13443/j.cjors.2015050101
XING T, HU Q R, LI J, et al. High precision imaging algorithm for synthetic aperture radar based on coordinate conversion[J]. Chinese journal of radio science,2016,31(2):368-375. (in Chinese). DOI: 10.13443/j.cjors.2015050101
资助项目: 国家自然科学基金(No.61271417)
联系人: 邢涛 E-mail:1mingzongyue@163.com
猜你喜欢
电子测试(2018年23期)2018-12-29 11:11:30
测控技术(2018年12期)2018-11-25 09:37:44
智富时代(2018年8期)2018-09-28 00:12:34
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
制造技术与机床(2017年2期)2017-05-04 04:17:35
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
山东冶金(2015年5期)2015-12-10 03:27:41
深空探测学报(2015年3期)2015-12-07 11:14:48
电源技术(2015年1期)2015-08-22 11:16:18