
BP模糊神经网络纯电动汽车电机控制
2016-06-22 05:41盘朝奉
河南科技大学学报(自然科学版) 2016年4期
陈 燎,丁 猛,盘朝奉,b
(江苏大学 a.汽车与交通工程学院;b.汽车工程研究院,江苏 镇江 212013)
BP模糊神经网络纯电动汽车电机控制
陈燎a,丁猛a,盘朝奉a,b
(江苏大学 a.汽车与交通工程学院;b.汽车工程研究院,江苏 镇江 212013)
摘要:针对传统比例积分(PI)控制在电机控制中控制效果不良的问题,设计了一种基于向后传播算法(BP)模糊神经网络的PI控制器。基于MATLAB/Simulink建立了纯电动汽车驱动系统的仿真模型,将驾驶员操作与电机驱动联系起来,在自主研发的整车惯性模拟台架上进行试验。仿真和试验结果均表明:在ECE城市工况下,采用BP模糊神经网络控制的纯电动汽车实际车速能较好地跟随工况需求车速,速度偏差在±2 km/h以内。
关键词:纯电动汽车;电机控制;神经网络;控制策略;循环工况测试
0引言
随着传统汽车引起的污染和能源问题日益突出,电动汽车成为代替传统汽车的研究热点。无刷直流电机因其一系列优点而备受汽车行业的关注,因此,对电机高效控制的研究有较大的现实意义。合适的电机控制策略可以提高电机工作效率,减少能量消耗,进而提高电动汽车行驶里程。传统比例积分(proportional integral,PI)控制因结构简单和有效得到广泛应用,但它对变化参数和非线性问题不能有效控制。采用无刷直流电机的纯电动汽车的控制是多变量和非线性的,因此,一些智能控制算法被加入控制系统中。文献[1]采用模糊控制策略对无刷直流电机进行控制,充分利用了模糊控制对非线性问题的处理能力,但实时跟随效果不好。文献[2]基于模糊控制提出了采用遗传算法自适应模糊控制,容易收敛于局部最优解,且计算时间较长。文献[3]提出了基于径向基核函数(radial basis function,RBF)神经网络的电机控制策略,通过神经网络的学习能力和适应能力提高控制精度并加快响应速度,但神经网络在处理数据时会出现数据病态问题。
为实现对目标车速的精确跟随,从而降低纯电动汽车的能量损耗,本文采用向后传播算法(back propagation,BP)模糊神经网络对PI控制器参数进行在线整定[4],并建立了纯电动汽车仿真模型,对控制效果进行仿真,最后在实验室自主研发的整车惯性模拟台架上进行试验。通过仿真和试验来验证BP模糊神经网络控制的优越性。
1系统框架结构
系统框架由室内台架、电机、电机驱动器、动力电池、控制计算机和测试控制器构成,如图1所示。图1中,MCU为电机控制器,M为电机,DA为数字模拟转换,CAN H为CAN总线高位数据线,CAN L为CAN总线低位数据线。采用自主研发的整车惯性模拟试验台架,该台架采用双轮对滚方式传递驱动轮扭矩及模拟滚动阻力,利用两个飞轮模拟整车惯量,飞轮根据转速能自动加载整车惯性,从而能够真实模拟电动汽车在行驶过程中的加速阻力。试验台架结构如图2所示。控制计算机加载“电动汽车循环工况自动跟踪测试系统”监控软件,测试控制器由单片机开发,模拟“驾驶机器人”传感器和执行器。传感器采集加速及制动踏板开度,执行器负责与控制计算机和电机控制器网络通信,并将加速和制动踏板开度信号转换成电压信号传给电机控制器。

图1 系统硬件结构图2 整车惯性模拟试验台架
进行试验前,控制计算机读入联合国欧洲经济委员会(economic commission of Europe,ECE)汽车法规城市工况[5]的速度数据。由于工况停车时间过长,为增加工况循环测试次数,取消停车时间段。试验所需电机、电池、电机控制器等器件均为某款微型纯电动汽车的标配部件。试验数据采集采用总线开发环境(CAN open environment,CANoe),数据分析及处理采用自主开发的“电动汽车循环工况自动跟踪测试系统”监控软件。
2整车模型建立
基于ADVISOR纯电动汽车仿真软件,运用MATLAB/Simulink软件建立纯电动汽车仿真模型[6-9]。仿真车辆的参数为:电动汽车总质量5 950 kg,主减速比6.836 6,轮胎半径0.385 m,空气阻力因数CD=0.56,迎风面积A=4.4 N·m,滚动阻力因数0.013,旋转质量换算因数1.05,机械效率0.90;无刷直流电机额定电压210 V,额定电流190 A,额定转速3 600 r/min,额定功率47.27 kW,最大功率157.5 kW,额定转矩120 N·m,电动势因数Ce=0.077 43,转矩因数Ct= 0.874 6。
2.1动力学模块
汽车运行过程中,始终满足汽车动力学方程。因此,汽车在任意时刻,动力系统需要提供的驱动力可由式(1)~式(3)计算得出[10-11]。在动力学模块中输入汽车总质量、车速和坡度信号,通过计算得到总驱动力F、空气阻力、滚动阻力和坡道阻力,计算得到电机阻力矩T为电机的输入负载。
∑F=Ff+Fw+Fi+Fj;
(1)
(2)

(3)
其中:m为整车质量,kg;f为滚动阻力因数;T为电机阻力矩;i0为主减速器传动比;ηt为机械效率;A为迎风面积,m2;CD为空气阻力因数;α为坡度角,(°);u为车速,km/h;δ为旋转质量换算因数,δ>1。
2.2电机及控制器模块
无刷直流电机具有结构简单、可靠性高和功率效率高等优点,同时,满足纯电动汽车所要求的低速恒转矩、高速恒功率的特性[12-14]。仿真模型主要包括6个模块:霍尔位置信号处理模块、感应电动势模块、电流模块、电磁转矩模块、逆变器模块和脉冲宽度调制(pulse width modulation,PWM)控制模块。
2.3驾驶员模块
汽车运行过程中,驾驶员提出的目标车速和汽车实际车速的差值作为负反馈输入控制系统。要求实际车速对目标车速实时跟随,当目标车速大于实际车速时,需要踩下踏板加速;当目标车速小于实际车速时,需要松开踏板减速[1]。所以,驾驶员模块可表示为负反馈结构,如图3所示。汽车运行过程中反馈的速度信号,经BP模糊神经网络控制策略处理后生成PWM的加速度控制信号,输入到电机控制器可实现汽车加速或减速。
BP模糊神经网络控制原理为:整车的车速偏差e和偏差变化率△e作为输入量,通过模糊化作为神经网络的输入,神经网络起模糊推理作用,通过自我学习,解模糊化输出,调整PI控制器的参数Kp、Ki以达到最优[4],从而达到更有效的控制效果。

图3 驾驶员模块的负反馈结构
3车速跟随仿真与试验验证
3.1仿真验证
为了验证本文提出的BP模糊神经网络控制与传统PI控制在车速跟随中的控制效果,采用本文建立的整车模型对ECE城市工况[5]在MATLAB/Simulink环境下进行仿真验证,实际车速对目标车速的跟随结果如图4和图5所示。
从图4和图5可以看出:两种策略控制的纯电动汽车车速跟随适应能力都很好,其中,BP模糊神经网络控制的实际车速与目标车速偏差更小。
为进一步观察两种控制策略下,纯电动汽车的实际车速与目标车速的偏差,对仿真过程的目标车速和实际车速作差,车速偏差如图6和图7所示。

图6 基于BP模糊神经网络控制的ECE城市工况目标车速与实际车速偏差图7 基于传统PI控制的ECE城市工况目标车速与实际车速偏差
从图6和图7可以看出:传统PI控制的车速偏差大于±2 km/h,而BP模糊神经网络控制的车速偏差在±2 km/h内,充分表明BP模糊神经网络控制比PI控制的精度高。
3.2试验验证
分别采用BP模糊神经网络控制和传统PI控制在自主研发的整车惯性模拟试验台架上进行试验,考察车轮转速和待模拟的目标转速跟随情况。
在ECE城市工况下,BP模糊神经网络控制和传统PI控制的纯电动汽车车速跟随试验结果如图8和图9所示。从图8和图9可以看出:在试验情况下,两种控制策略下的车速跟随效果与仿真分析时有很大差距,因为仿真模型是把汽车各部件理想化,用数学模型替代,所以跟随效果较好。而真实的试验环境下,汽车各部件有不同的工作效率,所以偏差较大。BP模糊神经网络的控制效果优于传统PI控制,和仿真验证结果一致。
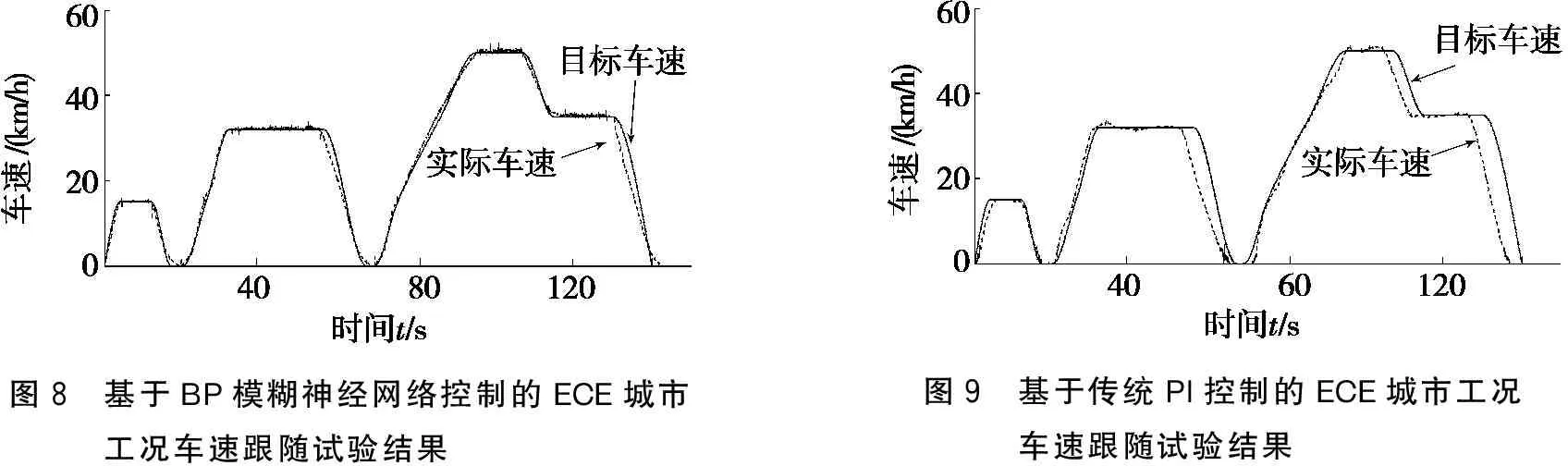
图8 基于BP模糊神经网络控制的ECE城市工况车速跟随试验结果图9 基于传统PI控制的ECE城市工况车速跟随试验结果
为进一步验证控制结果,两种控制策略下的纯电动汽车车速跟随偏差试验结果如图10和图11所示。

图10 基于BP模糊神经网络控制的ECE城市工况车速跟随试验偏差图11 基于传统PI控制的ECE城市工况车速跟随试验偏差
从图10和图11可以看出:传统PI控制的车速偏差大,超过±5.0 km/h,而采用BP模糊神经网络控制能将偏差控制在±2.0 km/h内,取得了对ECE城市工况跟随控制的良好效果。尤其在匀速跟随阶段偏差低于±0.5 km/h,车速变化波动小,明显提高了控制精度,且实时性强,完全能替代传统的PI控制。
4结论
对纯电动汽车的电机控制提出了BP模糊神经网络控制策略。基于MATLAB/Simulink建立整车模型,进行仿真分析和试验验证。采用BP模糊神经网络控制策略,纯电动汽车电机控制良好,速度跟随偏差较小,提高了整车的动力性、行驶稳定性及对目标工况的跟随性,整车性能得到改善。在纯电动汽车电机控制方面,BP模糊神经网络控制策略优于传统PI控制策略。
参考文献:
[1]王悝.基于模糊控制的纯电动汽车无刷直流电机驱动系统的研究[D].武汉:武汉理工大学,2011.
[2]侯春杰.基于遗传算法的无刷直流电机自适应模糊控制[D].洛阳:河南科技大学,2013.
[3]李琳.基于RBF神经网络无刷直流电机控制系统的基础研究[D].淮南:安徽理工大学,2015.
[4]王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI控制器参数整定方法[J].电工技术学报,2014(5):104-117.
[5]SALEHPOUR S,POURASAD Y,TAHERI S H.Vehicle path tracking by integrated chassis control[J].Journal of central south university,2015,22:1378-1388.
[6]李娜,杨正林,周振超.纯电动汽车前向仿真模型的研究[C]//中国汽车工程学会.2010中国汽车工程学会年会论文集.北京:机械工业出版社:2010:4.
[7]赵轩,马建,汪贵平,等.基于模糊PI控制的纯电动汽车驱动系统建模和仿真[J].科技导报,2010,15:83-87.
[8]冯超.基于Matlab/Simulink的电动汽车仿真模型设计与应用[D].北京:中国科学院大学,2013.
[9]杨超.电动汽车用永磁同步电动机驱动系统的模糊控制仿真[D].重庆:重庆大学,2004.
[10]余志生.汽车理论[M].北京:机械工业出版社,2007.
[11]刘峰,田韶鹏.电动汽车动力性能计算与仿真[J].北京汽车,2011(3):44-46.
[12]冀国威.电动汽车永磁无刷直流电机驱动控制系统研究[D].沈阳:东北大学,2013.
[13]付主木,高爱云.电动汽车用永磁同步电机模糊直接转矩控制[J].河南科技大学学报(自然科学版),2015,36(5):19-24.
[14]唐伟.纯电动汽车电机控制策略研究[D].成都:西华大学,2014.
基金项目:国家“863”计划基金项目(2012AA111401);国家自然科学基金项目(51105178);江苏省自然科学基金项目(BK2011489);江苏省六大人才高峰基金项目(2013-XNY-002)
作者简介:陈燎(1963-),男,四川德阳人,副教授,硕士,硕士生导师,主要从事汽车电子及智能交通系统方面的研究.
收稿日期:2016-01-14
文章编号:1672-6871(2016)04-0032-04
DOI:10.15926/j.cnki.issn1672-6871.2016.04.007
中图分类号:U469.72
文献标志码:A
猜你喜欢
电子制作(2019年19期)2019-11-23
山东冶金(2019年3期)2019-07-10
电子制作(2019年24期)2019-02-23
消费导刊(2018年10期)2018-08-20
青春岁月(2016年22期)2016-12-23
山东工业技术(2016年15期)2016-12-01
通信电源技术(2016年1期)2016-04-16
重型机械(2016年1期)2016-03-01
科技视界(2016年4期)2016-02-22
现代经济信息(2016年1期)2016-01-25
