
频率域感应式磁传感器信号调理电路研究
2016-06-20 08:50陈晓东张振宇赵富刚
物探化探计算技术 2016年2期
关键词:幅频特性
赵 毅,陈晓东,王 刚,张振宇,赵富刚
(中国地质科学院 地球物理地球化学勘查研究所,廊坊 065000)
频率域感应式磁传感器信号调理电路研究
赵毅,陈晓东,王刚,张振宇,赵富刚
(中国地质科学院地球物理地球化学勘查研究所,廊坊065000)
摘要:感应式磁传感器在地球物理电磁法勘探中已得到广泛应用,国内多家单位已开展感应式磁传感器的研制工作。这里首先介绍了感应式磁传感器的原理,然后对其信号调理电路(开环式和闭环式电路)进行了分析,综合二者的优点设计了信号调理电路,并研制出相应的磁传感器。最后通过野外对比试验,验证了所研制的磁传感器的有效性,该设计为感应式磁传感器地研制提供了很好地技术支撑。
关键词:感应式磁传感器;信号调理电路;幅频特性;相位;磁通反馈
0前言
感应式磁传感器是电磁法勘探中应用最广泛磁场信号接收传感器,主要应用于金属矿产、石油资源的勘探以及深部地球物理勘探。近年来,在地下水、火山地质、地热、环境监测、工程勘探、市政工程和土壤盐碱化等领域也得到了应用。在这些应用中要求一段频率范围内准确、不失真的测量磁场信号[1],如基于天然场的音频大地电磁法(AMT)、基于人工场的可控源音频大地电磁法(CSAMT)等。在上述测量方法中,为了简化数据采集系统和数据处理解释方法,通常要求磁传感器能够在测量频率范围内(一般为10 Hz~10 000 Hz)输出灵敏度与频率无关[3],灵敏度大于0.1 V/nT。因此在感应式传感器的制作过程中需要通过信号调理电路作适当处理[4]以满足上述要求。
1感应式磁传感器原理
感应式磁传感器通常由线圈和信号调理电路两部分组成。线圈的等效电路如图1所示。
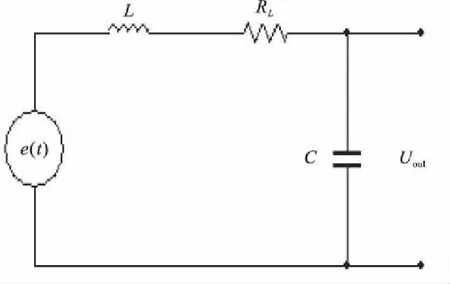
图1 线圈的等效电路Fig.1 Equivalent circuit of coil
根据法拉第电磁感应定律[2],当把匝数为Ν、截面积为S 的圆柱形螺线管线圈放置在随时间变化的磁场 B(t)中时,在线圈中就会产生感应电动势[6]e(t),即
(1)
其中:φ(t)为通过线圈的磁通量;μ0为真空导磁率;N为激励线圈密度;i(t)为激励电流;Ν为响应线圈的圈数。对于带有磁导率为μr的磁芯的螺线管线圈,其感应电动势 em(t)为:
(2)
其中μR为磁芯相对磁导率。由式(1)、式(2)可知,被测磁场的变化率可由线圈的感应电动势所反映。
2信号调理电路
由于感应线圈获得的信号比较微弱,不能直接进行数据采集,需加以放大和调理后才能使用,故需要设计相应的信号调理电路。
信号调理电路根据原理的不同,可分为开环调整式和闭环调整式[3]。图2 给出了两种方式传感器的原理框图。
开环调整式的信号调理电路的调试不影响感应线圈的输出特性,设计调试相对容易。闭环调整式会改变感应线圈的输出特性,设计稍复杂一些。
信号调理电路包括两部分:①信号放大;②信号补偿。信号放大电路把线圈的感应电压放大到一定的幅度,信号补偿电路则把线圈谐振点两侧部分调整到相对平坦的位置。
图3、图4分别是感应线圈的幅频特性和相位曲线。由图4可知,在线圈的谐振点附近相位发生了突变,由+ 80ο跳到了-80ο,这对数据处理解释带来了不便。开环调整式信号调理电路解决不了相位突变问题,因此,磁传感器的频点只能用谐振点的左侧部分。

图2 信号调理原理图Fig.2 Principle diagram of signal adjustment(a)开环调整;(b)闭环调整
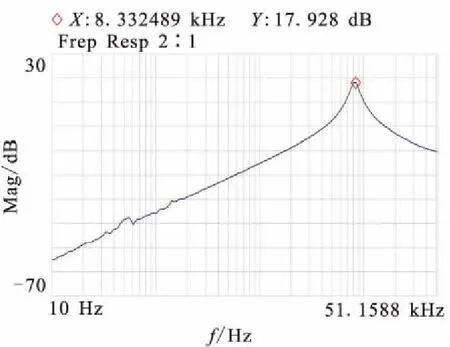
图3 感应线圈幅频特性曲线Fig.3 Amplitude frequency characteristics of inductive coil
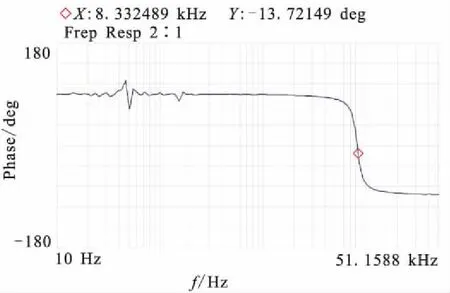
图4 感应线圈相位曲线Fig.4 Phase characteristics of inductive coil
信号放大电路通常选用低噪声[11-12]、低漂移的运算放大器,这里不做详细介绍,重点介绍信号补偿电路。以下是几种常见的开环和闭环调整式信号调理电路。
2.1开环调整式信号调理电路
2.1.1比例放大电路
在图5中,通过R1、R2设置适当的放大倍数,调整C1设置合适的带宽。增大C1带宽变小,减小C1带宽变大,其-3 dB带宽应调整到线圈谐振点之前。图6是其幅频特性曲线。线圈通过比例放大补偿后的幅频特性与图10相似。
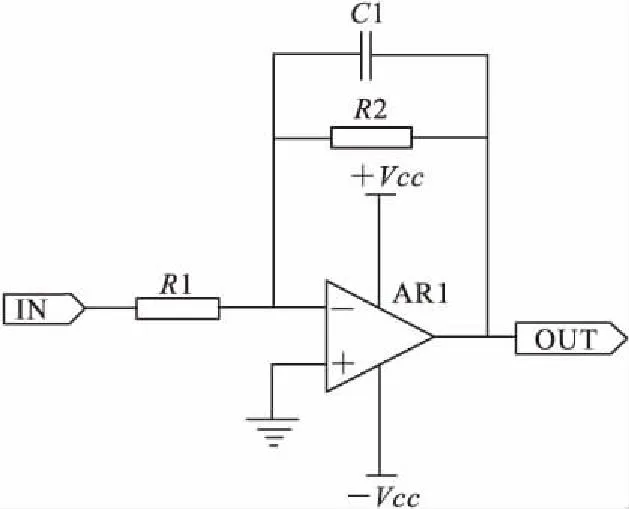
图5 比例放大器电路Fig.5 Proportional amplifier circuit
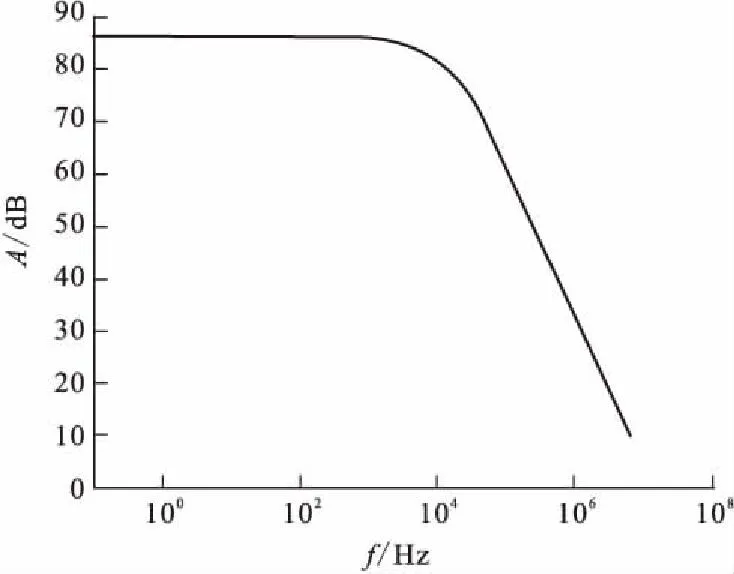
图6 放大电路幅频特性曲线Fig.6 Amplitude frequency characteristics of proportional amplifier circuit
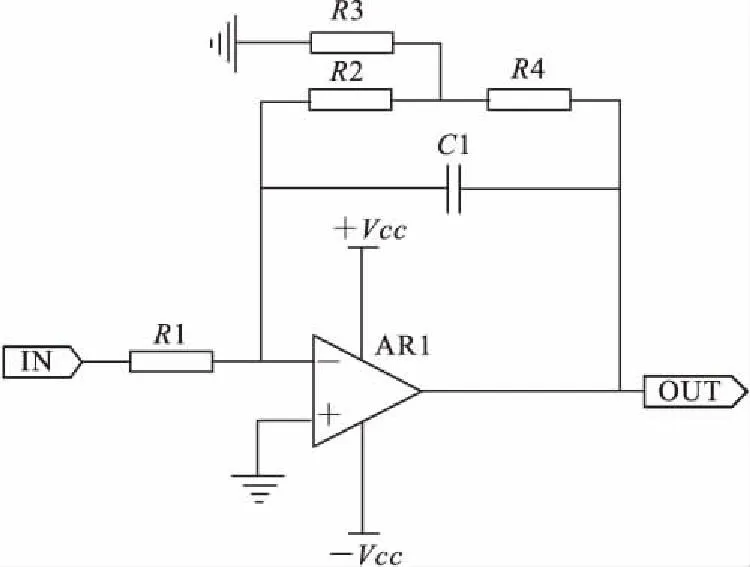
图7 积分补偿电路Fig.7 Integral compensation circuit
2.1.2积分补偿电路[7]
积分补偿电路的基本思路是根据感应线圈的幅频特性设计一个与之相反的补偿电路特性,这样就可以把信号调整到一个相对平坦的幅度。补偿电路的幅频特性曲线[6]如图8所示,随着频率的增加其输出幅度线性变小,这正好与线圈的幅频特性相反[6],如图9所示。补偿后的幅频特性曲线[6]见图10。图7 是积分补偿电路,由放大器AR1、电阻R1、R2、R3、R4和电容C1构成。
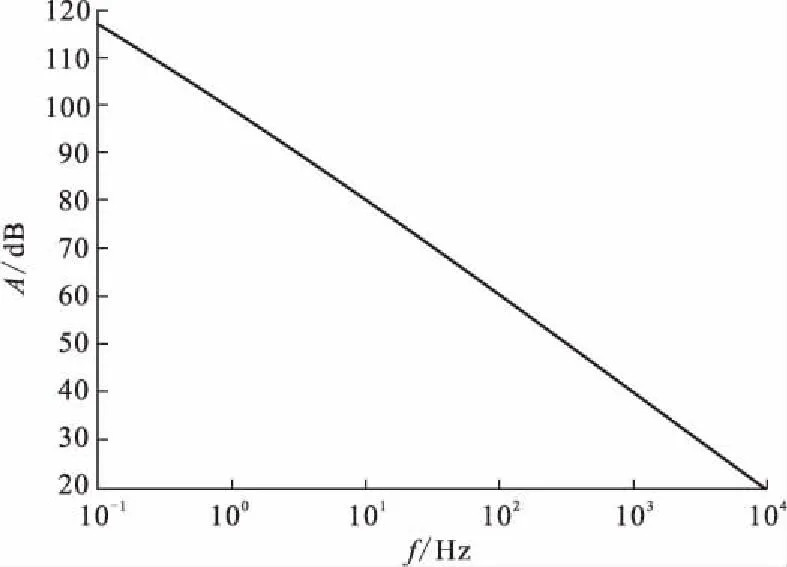
图8 积分补偿电路幅频特性曲线Fig.8 Amplitude frequency characteristics of integral compensation circuit
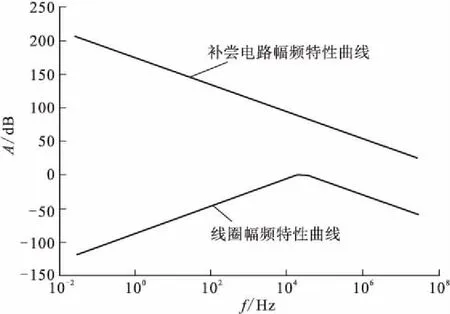
图9 线圈与积分补偿幅频特性Fig.9 Amplitude frequency characteristics of coil and integral compensation circuit
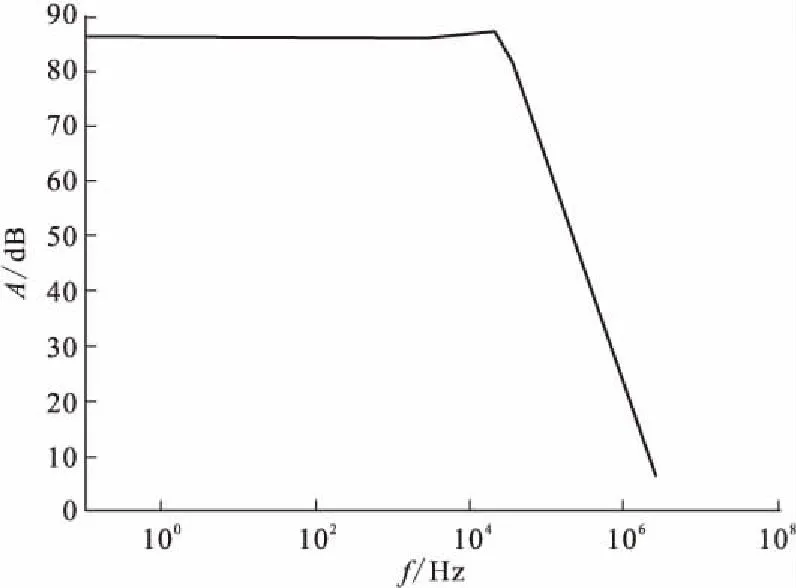
图10 积分补偿后幅频特性Fig.10 Amplitude frequency characteristicsof integral compensation later
其传递函数为:
2.1.3马鞍型补偿电路
马鞍型电路补偿的基本思想是在谐振频率的两边按曲线的梯度进行放大[8],而在谐振频率点及其周围很小的区域保持其信号幅度不变。图11(a) 是低频补偿电路,由放大器AR1、电阻R1、R2、R3和电容C1构成。其功能类似低通滤波器,通过调整C1来设置频带的拐点。图11(b) 是高频补偿电路,由放大器AR1、电容C1、C2、C3和电阻R1构成。其功能类似高通滤波器,通过调整R1来设置频带的拐点,通过高低频补偿电路相加进行信号调理。
图12 是线圈高低频补偿后的灵敏度曲线,从图中可看出,在线圈谐振点两侧经补偿后比较平坦,而在谐振点处有起伏变化,这给信号的处理解释带来不便。
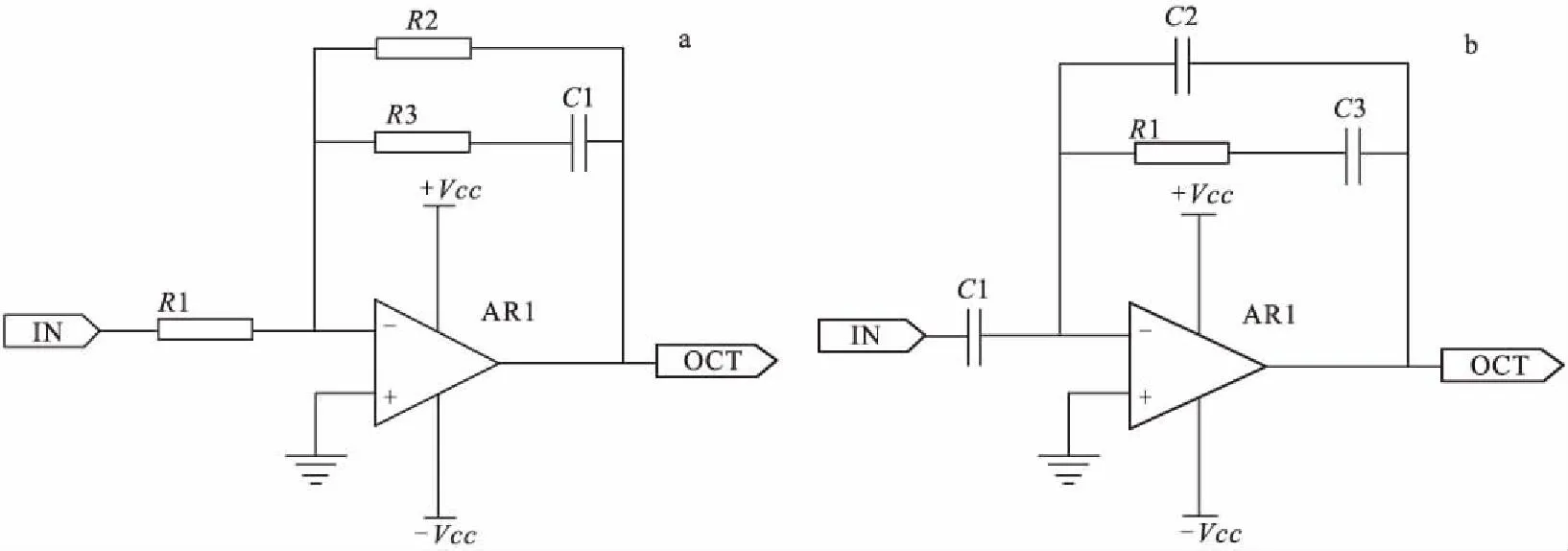
图11 高低频补偿电路Fig.11 Compersation electvic circait of high and low frequency(a)低频补偿电路;(b)高频补偿电路
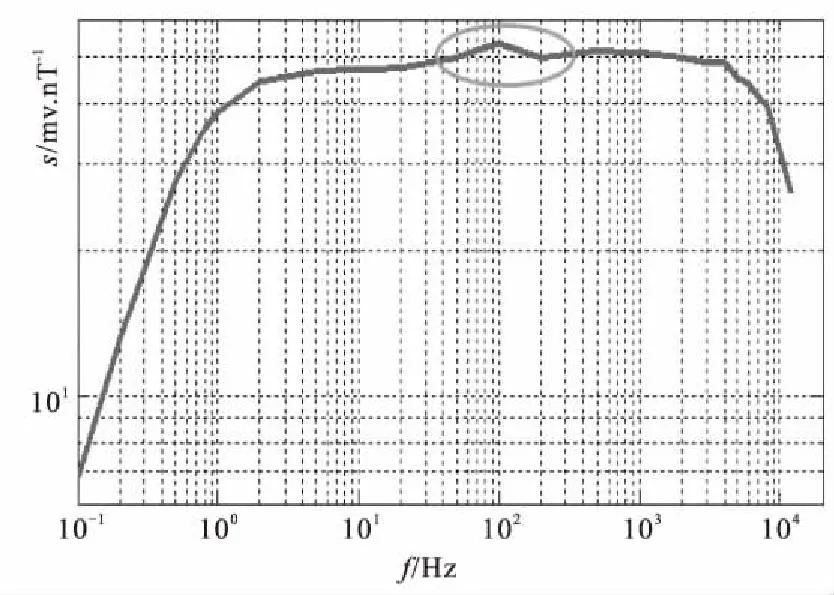
图12 马鞍型补偿后灵敏度曲线Fig.12 Sensitivity of saddle style compensation later
综上所述,采用以上三种形式的补偿电路[13],传感器的幅频特性不尽相同:①比例放大电路的缺点是当传感器的上限频率在几百 Hz 时,放大器的输出电压的动态范围会较大;②积分补偿电路在低于谐振点的频率范围内,与线圈的幅频特性完全相反,采用此补偿电路可以使传感器的幅频特性类似于图10,但在谐振点处相位发生突变,故频点只能用在低于谐振频率的左侧;③马鞍型补偿电路通过将低频放大电路与高频放大电路相加得到补偿后的灵敏度曲线(图12),其在较宽的频率范围内有较平坦的特性曲线,传感器频带得到拓宽,但是经过补偿后的传感器在此范围内灵敏度曲线会有起伏,如图 12中画圈部分所示。
2.2闭环调整式信号调理电路
由前面可知,开环调整式信号调理电路的带宽只能用在谐振点的左边,限制了磁传感器的带宽。随着国民经济的快速发展,探测深部资源的要求越来越迫切,这就要求磁传感器具有较宽的频率范围,满足深部资源勘查的要求。开环调整式信号调理电路已不能满足要求,故采用磁通反馈式的闭环调整方法。
2.2.1磁通反馈原理
原理是被测的变化磁场经感应线圈输出电压信号,之后经放大电路放大,再经过反馈电路将电压信号转换为电流信号,然后将该电流信号流经绕在感应线圈外部的反馈线圈上,产生与被测磁场相反的磁场,两者相减得到净磁场,形成闭合磁通反馈。其原理框图如图13所示。
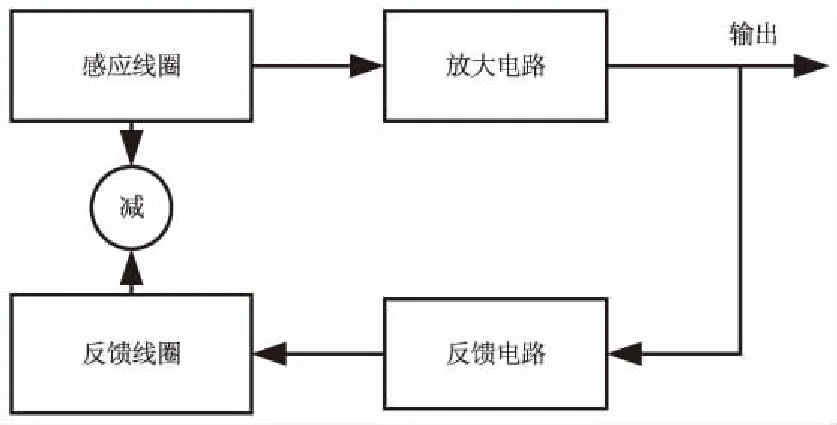
图13 磁通反馈原理框图Fig.13 Principle diagram of magnetic flux feedback
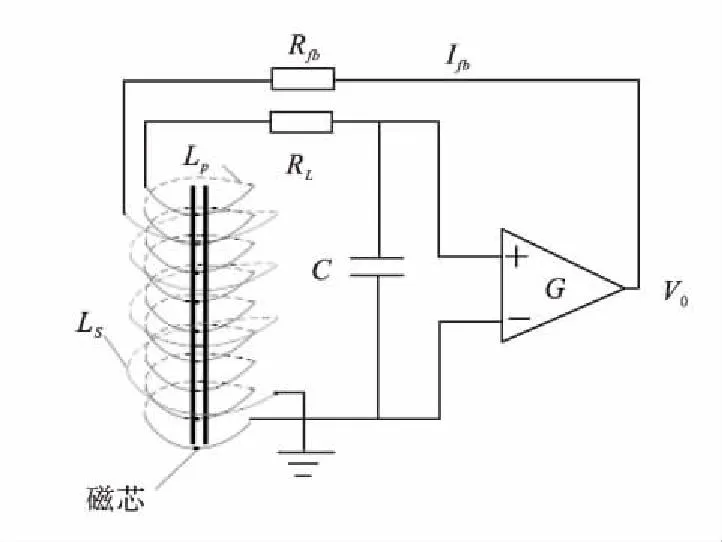
图14 采用磁通反馈的传感器原理图Fig.14 Principle diagram of sensor adopting magnetic flux feedback
据此原理的磁传感器原理图如图14所示。其中:Lp为感应线圈的电感;Ls为反馈线圈的电感;RL为感应线圈的直流电阻;C 为线圈的分布电容;Rfb为反馈电阻;G为放大器的放大倍数;Ifb为反馈电流;V0为传感器的输出。
2.2.2磁通反馈系统幅频特性和相位特性

幅频特性为:
相位特性为:
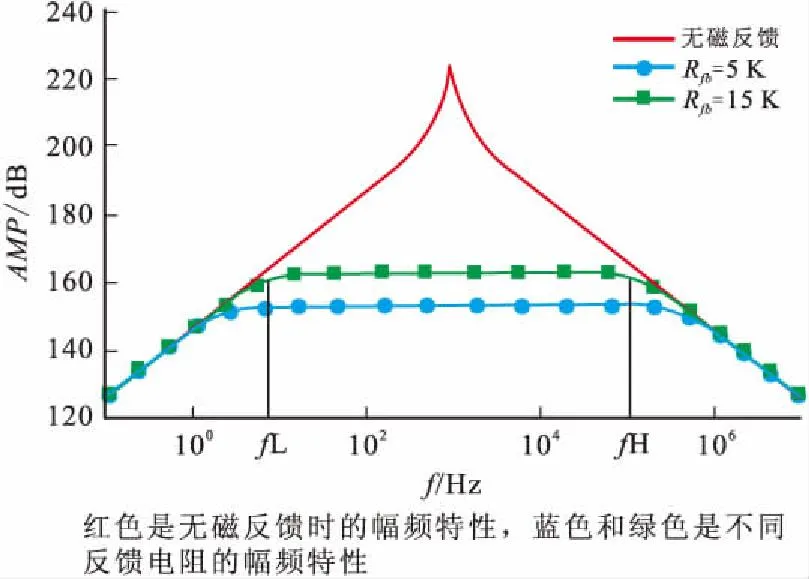
图15 有无磁反馈时传感器的幅频特性Fig.15 Amplitude frequency characteristics of sensor adopting and not adopting magnetic flux feedback
图15是采用磁通反馈后的磁传感器幅频特性,由图15可知,采用磁通反馈后的幅频特性曲线较为平坦,同时反馈电阻大小不同时,传感器的平坦部分带宽也不同。另外,反馈电阻不能过小,即反馈过深,否则会引起振荡。
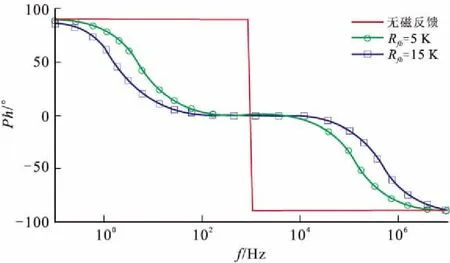
图16 有无磁反馈时传感器的相频特性Fig.16 Phase characteristics of sensor adopting and not adopting magnetic flux feedback
图16是有无磁反馈时传感器的相频特性,采用磁通反馈的相频特性在谐振点处没有出现相位突变现象,相位曲线比较平缓。另外不同的反馈电阻,即不同的反馈深度,相频特性的线性范围也不同。
因此与开环式补偿电路相比,采用磁通反馈技术使传感器的应用频带扩展到高于谐振频率范围,拓宽了磁传感器的应用范围。
3信号调理电路设计
3.1电路设计
根据开环式和闭环式信号调理电路的优缺点,设计了积分补偿电路和磁通反馈相结合的信号调理电路。该电路的优点是磁传感器低频的灵敏度得到提高,线圈谐振点处的相无突变问题,这样磁传感器的带宽就得以拓宽,传感器的灵敏度平坦部分更宽。其电路图如图17,其中,L1、L2为感应线圈,L3为补偿线圈。放大器U1以及电阻R1、R2、R3、组成差分输入式放大器,有效抑制共模噪声;电阻R4、R5、R6、R7、R8、R9、C1和放大器U2组成积分补偿电路;D1~D4为保护二极管,起限幅作用,防止放大器U1被击穿损坏;R10为反馈电阻,其阻值大小决定着磁传感器灵敏度(平坦部分)的高低;放大器U3、R11、R12、C2、C3组成二阶低通滤波器,其作用是抑制带宽、降低高频噪声。
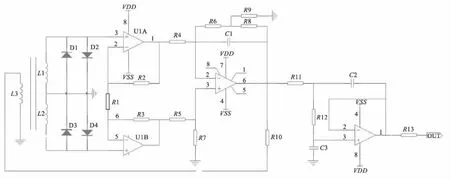
图17 磁传感器信号调理电路图Fig.17 Signal adjustment electric circuit of magnetism transducer
3.2磁传感器幅频特性及相位特性测试
采用上述信号调理电路研制了相应的磁传感器,其幅频特性和相位特性测试在野外环境干扰比较小的地区进行,测试设备采用加拿大凤凰公司大地电磁测量仪V8。 测得的灵敏度和相位曲线见图18。其频率范围是0.1 Hz~10 000 Hz,在2 Hz~8 000 Hz频段内具有较平坦的幅频特性。其相位在整个频段内无突变,满足电磁法勘探的要求。
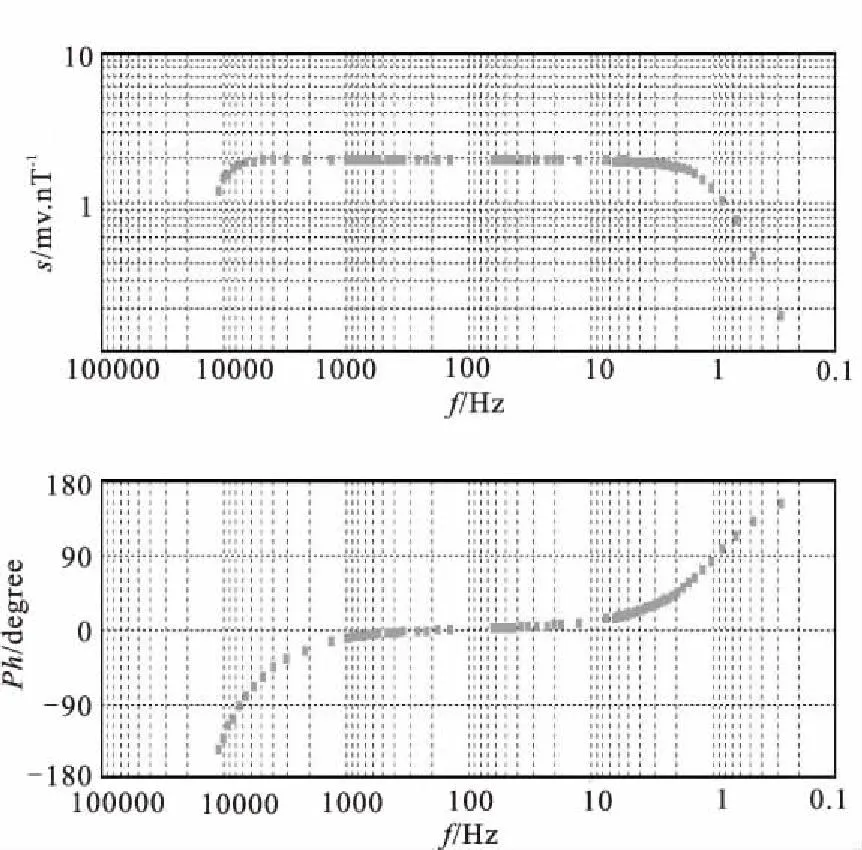
图18 磁传感器灵敏度和相位曲线Fig.18 Sensitivity and Phase of magnetism transducer
图19是采用常规的磁通反馈信号调理电路(图17中去掉由U2构成的积分补偿电路部分)与作者设计的信号调理电路的磁传感器灵敏度对比曲线。从图19可看出,采用常规磁通反馈信号调理电路的磁传感器低频灵敏度为3 mV/nT(@0.1Hz),而采用作者设计的信号调理电路的磁传感器低频灵敏度为18 mV/nT(@0.1Hz),两者相比相差6倍。同时灵敏度平坦部分相比,前者在20 Hz~4 kHz范围较平坦,而采用作者设计的电路研制的磁传感器灵敏度平坦部分较宽,平坦部分范围为3 Hz~6 kHz。这些都体现了作者设计的信号调理电路的优点:高灵敏度(低频)和高带宽(平坦部分)。特别是在频率为1 Hz时的灵敏度大大提高,大约是前者的5倍,这很大地提高了1 Hz信号的信噪比。

图19 采用两种信号调理电路的磁传感器灵敏度曲线Fig.19 Sensitivity of two signal adjustment electric circuit of magnetism transducer
图20是是采用常规的磁通反馈信号调理电路与作者设计的信号调理电路的磁传感器相位对比曲线。从图20中可看出,采用作者设计的信号调理电路的磁传感器的相位曲线(蓝色)无相位突变现象,而且较采用常规的磁通反馈信号调理电路的磁传感器相位(红色)更平滑。
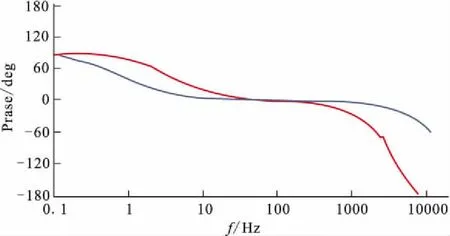
图20 采用两种信号调理电路的磁传感器相位曲线Fig.20 Phase characteristics of two signal adjustment electric circuit of magnetism transducer
4感应式磁传感器野外实验
磁传感器研制完成后开展了CSAMT野外对比试验,分别采用加拿大凤凰公司AMTC-30与作者所研制的IGGE-30做对比试验。接收机采用加拿大凤凰公司V8,发射电流18 A,发射AB极距1.2 km,收发距8 km。试验地点在甘肃省酒泉市马鬃山镇,发射机使用加拿大凤凰公司V8系统,两传感器平行放置,相距5 m,CSAMT试验中磁传感器都是记录Hy的值,发射频率从1 Hz~8 533 Hz。
图21和图22是AMTC-30和IGGE-30磁传感器进行CSAMT对比试验取得的磁场Hy数据和相应的视电阻率数据所绘制的对比曲线,曲线吻合的较好。
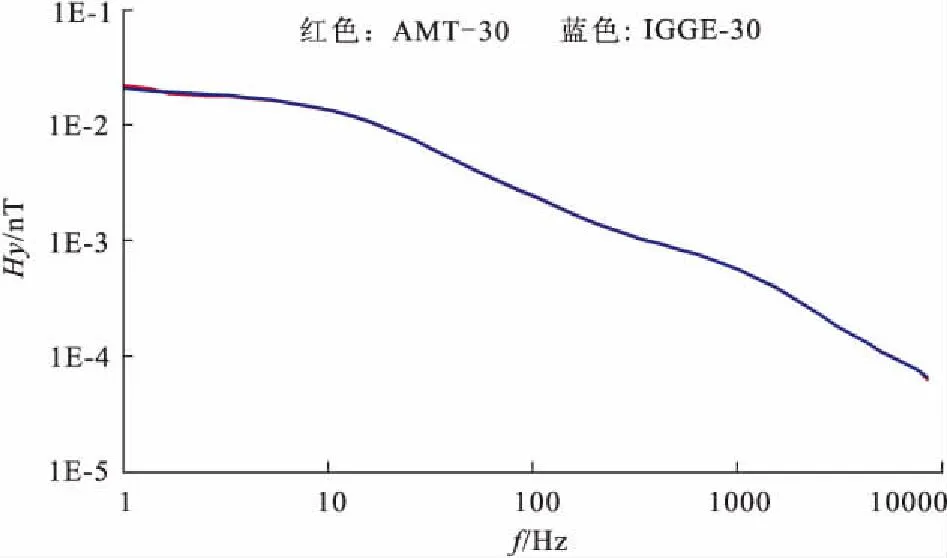
图21 AMTC-30与IGGE-30 CSAMT测得的磁场值Fig.21 Magnetic field value of AMTC-30 and IGGE-30
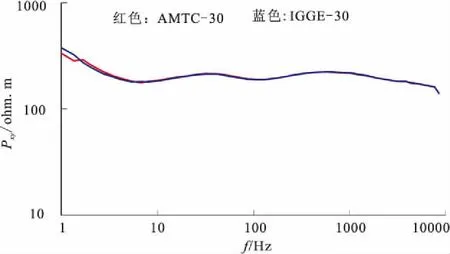
图22 AMTC-30与IGGE-30 CSAMT测得的视电阻率曲线Fig.22 Apparent resistivity of AMTC-30 and IGGE-30
从野外对比试验可看出,采用作者设计的信号调理电路研制的感应式磁传感器已达到国外该类传感器的水平,可替代国外该类磁传感器。同时也证明了所设计的信号调理电路的可行性。
5结论
综上所述,感应式磁传感器开环调整式信号调理电路由于带宽的限制,已不能满足地球物理电磁法勘探的需要,磁通反馈法闭环式信号调理电路扩展了带宽,解决了相位突变问题。采用开环式中的积分补偿电路和闭环式磁通反馈法相结合,设计的信号调理电路研制的感应式磁传感器,经过野外试验证明了该信号调理电路的有效性。这为我国感应式磁传感器的研制提供了有力地参考。感应式磁传感器的国产化将解决我国电磁法地球物理仪器发展的瓶颈问题,打破国外垄断,为我国地球物理电磁法勘探提供很好的技术支撑。
参考文献:
[1]张秀成.大地电磁测深测量及仪器[M].北京:地质出版社,1989.
ZHANG X C.Magnetotelluric sounding measurements and instrumentation[M].Beijing:Geological Publishing House,1989.(In Chinese)
[2]程守洙,江之永.普通物理学[M],北京:高等教育出版社,2006
CHENG S Z,JANG Z Y.General physics[M].Beijing:Higher education press,2006.(In Chinese)
[3]郑采君.感应式频率域磁场传感器设计[J].电子设计工程,2012,20(18):48-53.
ZHENG C J,Design of frequency domain inductive magnetic field sensors[J].Electronic Design Engineering,2012,20(18):48-53.(In Chinese)
[4]解源,钱俊岳.基于非晶态合金的磁场传感器的研究[J].电测与仪表,2006,2(482):59-61.
XIE Y,QIAN J Y.Research for induction magnetic sensor based on amorphous alloy[J].Elctric Measurement &Instrumentation,2006,2(482):59-61.(In Chinese)
[5]凌振宝,王君,张瑞鹏.基于非晶态合金感应式传感器补偿电路的设计[J],传感技术学报,2003,6(2):207-209.
LING Z B,WANG J,ZHANG R P.A Design of compensation circuit based on sensor for reaction amorphous alloy [J].Journal of Transcluction Technology,2003,6(2):207-209.(In Chinese)
[6]邵英秋.感应式磁传感器线圈参数及其接口电路的研究[D].吉林:吉林大学,2008.
SHAO Y Q.Magnetic Induction Sensor Parameter of Loop and Study of Its Interface Circuit[D].Jilin:Jilin university ,2008.(In Chinese)
[7]杨盘洪,最新集成运算放大器应用手册[M].太原:山西科学技术出版社,1998 .
YANG P H.The latest manual integrated operational amplifier applications[M].Taiyuan:Shanxi science and technology press,1998.(In Chinese)
[8]林继鹏.基于非晶态合金的感应式磁敏传感器的研究[J].仪器仪表学报,2004,25(2):195-197.
LIN J P.Research for induction magnetic sensor based on amorphous alloy[J].Chinese Journal of Scientific Instrument,2004,25(2):195-197.(In Chinese)
[9]邵英秋.宽频带感应式磁传感器研制[D].吉林:吉林大学,2012.
SHAO Y Q.Development of Broadband Inductive Magnetic Sensor[J].Jilin:Jilin university doctoral dissertation,2012.(In Chinese)
[10]邵英秋,王言章,程德福,等.基于磁反馈的宽频带磁传感器的研制[J],仪器仪表学报,2010,31(11) :2461-2466.
SHAO Y Q,WANG Y Z,CHENG D F,et al.Development of broad frequency band magnetic field sensor based on flux feedback[J].Chinese Journal of Scientific Instrument,2010,31(11) :2461-2466.(In Chinese)
[11]郭玉,赵顺平.低噪声前置放大器有源器件的选择[J].电测与仪表,2007(6):62-64.
GUO Y,ZHAO S P.Low noise preamplifier active device selection[J].Elctric Measurement &Instrumentation,2007(6):62-64.(In Chinese)
[12]袁真,李海.低噪声运放前置放大器的实用设计[J].仪表技术,2000(6):20-22.
YUAN ZH,LI H,Low noise operational amplifier and practical design of the preamplifier[J].Instrument technique,2000(6):20-22.(In Chinese)
[13]高金梁.感应式磁传感器及其补偿电路的设计[D].吉林:吉林大学仪器科学与电气工程学院,2006.
GAO J L.Design of inductive magnetic sensor and compensation circuit[D].Jilin:School of Instrument Science and electrical engineering,Jilin University,2006.(In Chinese)
Research for signal adjustment electric circuit of inductive magnetism transducer in the frequency domain
ZHAO Yi,CHEN Xiao-dong,WANG Gang,ZHANG Zhen-yu,ZHAO Fu-gang
(Institute of Geophysical and Geochemical Exploration CAGS,Langfang065000,China,)
Abstract:The inductive magnetism transducer is most widely used in geophysical electromagnetic exploration.There are several units have carried out the research work of the inductive magnetism transducer in the internal.The measuring principle of the inductive magnetism transducer is first introduced in the paper.Then this analysis is signal adjustment electric circuit of open-loop and close-loop.The signal adjustment electric circuit is designed on the basis of two's advantage,and the inductive magnetism transducer is developed.Finally,it's availability is verified through the experiment of measuring internal and foreign inductive magnetism transducer in the field.This design will help to develop the inductive magnetism transducer.
Key words:inductive magnetism transducer;signal adjustment electric circuit;amplitude frequency characteristics;phase;magnetic flux feedback
收稿日期:2015-03-02改回日期:2015-06-07
基金项目:地质大调查资助项目(12120113100800)
作者简介:赵毅(1969-),男,硕士,主要从事电磁法传感研制工作,E-mail:thisyz@sina.com。
文章编号:1001-1749(2016)02-0198-08
中图分类号:P 631.3
文献标志码:A
DOI:10.3969/j.issn.1001-1749.2016.02.09
猜你喜欢
汽车实用技术(2020年18期)2020-10-28
江苏理工学院学报(2020年4期)2020-09-26
汽车实用技术(2019年12期)2019-10-21
中国教育技术装备(2019年4期)2019-09-09
科技创新与应用(2019年10期)2019-06-27
科技创新导报(2017年28期)2017-11-28
电子技术与软件工程(2017年8期)2017-05-10
电脑知识与技术(2016年4期)2016-04-11
现代电子技术(2015年11期)2015-07-28
振动、测试与诊断(2014年5期)2014-03-01
