基于S变换的机载雷达稳健空时自适应算法
2016-06-20 09:16:41高志奇陶海红赵继超
系统工程与电子技术 2016年6期
关键词:机载雷达
高志奇, 陶海红, 赵继超
(西安电子科技大学雷达信号处理国家重点实验室, 陕西 西安 710071)
基于S变换的机载雷达稳健空时自适应算法
高志奇, 陶海红, 赵继超
(西安电子科技大学雷达信号处理国家重点实验室, 陕西 西安 710071)
摘要:非均匀杂波环境中的离群点会导致空时自适应处理(space-time adaptive processing,STAP)性能的下降。针对此问题,该文提出一种新的基于S变换的稳健STAP(S transform-STAP, ST-STAP)算法。该算法主要利用杂波和离群点的S变换在时频平面上分布特性的不同来实现非均匀杂波的抑制。ST-STAP算法首先将样本数据对应的快时间序列作S变换得到时频分布矩阵,舍弃部分高频分量以去掉离群点的影响,然后用时频矩阵的剩余部分计算相关矩阵和自适应滤波权。蒙特卡罗实验证明ST-STAP方法的稳健性和动目标检测性能均优于传统的STAP算法。
关键词:机载雷达; 空时自适应; S变换; 离群点
0引言
目前,空时自适应处理(space-time adaptive proces-sing, STAP)是机载雷达杂波抑制和动目标检测的基本方法[1]。STAP的最优滤波权依赖于杂波协方差矩阵R的精确估计。根据RMB准则,若想通过样本数据精确估计R,必须满足以下条件:①所有样本数据必须满足独立同分布(independent and identically distributed, IID)假设;②用于估计R的IID样本数据的数量至少要达到系统自由度的两倍才能保证系统的输出信杂噪比损失不大于3 dB;③样本数据中不能包含动目标等杂质信息[2]。
STAP方法通常是基于均匀杂波环境,所以R可以通过均匀的训练样本数据进行估计。但实际的杂波环境是非均匀的,特别是训练样本中包含有动目标信号时,R的估计会出现较大误差,从而导致STAP性能的极大下降。包含在训练样本中的动目标信号称为离群点。离群点导致训练样本不满足IID假设的情况称为非均匀杂波[3]。为了克服非均匀杂波对于动目标检测性能的影响,人们一般使用对角加载(diagonal loading, DL)和非均匀样本检测(non-homogeneity detection, NHD)等方法来增强STAP的稳健性[4]。DL方法是通过在样本数据相关矩阵中加入一定功率的噪声信号从而抑制离群点的干扰。如何选择合适的加载功率依然是该方法的一个难点[5],实际应用中一般根据经验进行选择,所以该方法由于很难获得合适的加载功率而不能达到最优滤波效果。NHD一般是通过广义内积(generalized inner products, GIP)等方法从训练样本集中挑选并剔除包含离群点的样本数据[6],但是当离群点较多时,GIP方法的性能下降很大[7]。
本文提出一种基于S变换(S transform, ST)的稳健STAP算法(ST-STAP)用于抑制离群点的影响。该算法主要利用杂波与离群点在时频平面分布不同的特点,通过S变换将快时间序列在时频平面上展开,舍弃离群点频谱较为集中的频率段,然后计算自相关矩阵,以消除离群点对于滤波权的影响,提高STAP的稳健性。
1问题模型
1.1信号模型[8-10]

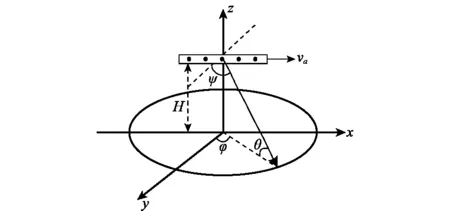
图1 机载雷达工作原理图
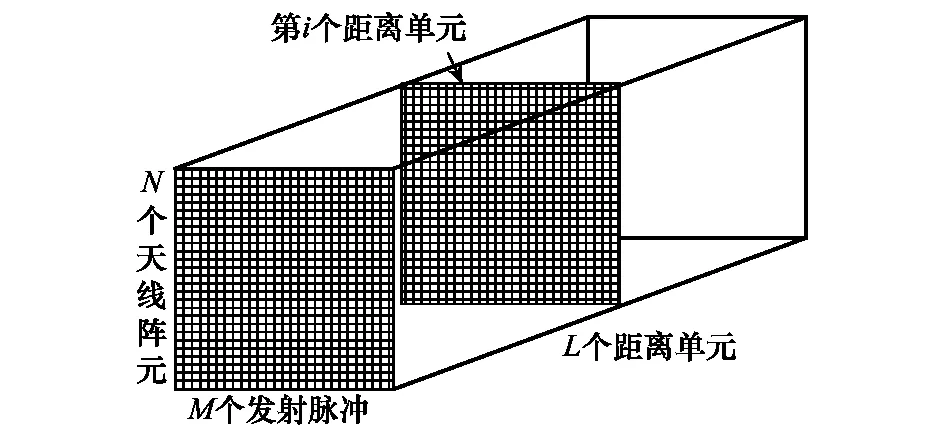
图2 雷达采样数据集
每个距离单元的杂波数据可以看作Nc个杂波反射点的反射信号之和。第i个杂波反射点对应的空间频率ωs,i和归一化多普勒频率ωd,i分别定义为
(1)
(2)
式中,i=1,2,…,Nc;d为阵元间距。第i个杂波反射点的空时导向矢量表示为
(3)
式中
(4)
(5)
分别表示时间导向矢量和空间导向矢量;⊗表示Kronecker积;(·)T表示矩阵转置。第k个距离单元的杂波加噪声快拍数据表示为
(6)
式中,εc,i表示第i个杂波反射点的复系数;N0代表噪声。
1.2非均匀样本问题[11-13]
传统STAP方法的最优滤波权由式(7)决定
(7)
式中,S为目标的导向矢量;R为理想的杂波协方差矩阵。实际上R是未知的,只能进行估计。通过样本数据估计的杂波协方差矩阵Re表示为
(8)
式中,k为待检测距离单元;(·)H表示共轭转置。通常用Re代替式(7)中的R来计算最优滤波权。上述通过样本数据估计协方差矩阵求逆(samples matrix inverse, SMI)计算最优滤波权的方法记为SMI-STAP。
STAP的训练样本数据必须满足IID假设,即要求被观测地形的特性保持不变且不包含动目标。但是某些特殊的被观测地形(如高速公路、城市)在不同的距离单元内会同时出现动目标。如果将包含动目标的采样数据作为训练样本,一旦样本与被检测距离单元二者中包含的动目标多普勒频率接近,滤波器会将被检测的动目标信号当作杂波滤除而出现动目标信号相消现象。为克服非均匀杂波环境的影响,需要对Re进行改进。DL和NHD是改进Re的常用方法。DL是在Re的对角线上加入一个非负常数,然后对其求逆计算最优滤波权,称为DL-STAP算法。NHD是通过某种规则将包含离群点的训练样本挑选出来并进行剔除的一种方法。广义内积(generalizedinnerproducts,GIP)检测法是典型的NHD方法。该方法由样本数据产生GIP序列,并通过一定的门限选择和剔除包含离群点的样本,然后利用剩余样本估计Re并求逆计算最优滤波权。该方法记为GIP-STAP。
2ST-STAP算法
2.1S变换[14-15]
对任意函数x(t)∈L2(R),其ST定义为
(9)
式中,τ为控制高斯窗口在t轴位置的参数。由定义可以看出,ST相当于信号加了宽度和高度可变的高斯窗函数后进行的傅里叶变换,因此其时间和频率分辨率都是可变的。
S逆变换的定义为
(10)
由式(9)和式(10)可以看出,ST与傅里叶变换在本质上具有一致性,因此可以借助快速傅里叶变换实现ST的快速计算。实际中使用的都是离散形式的ST,其定义为
(11)
(12)
其中
(13)
D点离散信号x(n)的ST结果是列和行分别对应采样时间点和频率点的矩阵,其形式为
(14)
式中,V代表频率采样点数;D代表时间采样点数。此处,S的列按照时间增加的顺序排列,而行按照频率递减的方式排列。
2.2ST-STAP算法
对于图2所示的雷达采样数据集,每个距离单元对应的N×M维数据矩阵按列的顺序排列为NM×1维的列向量,其中的元素表示某个阵元对应于特定发射脉冲时的接收信号。将所有列向量按距离单元的顺序排列为NM×L维的样本数据矩阵X,其形式为
(15)
X的每行表示特定的空时阵元随距离单元(快时间)的变化特性,称为快时间序列。该序列的大多数元素代表的是杂波加噪声(其中噪声是高斯分布的加性白噪声)。在某个或某几个快时间处,序列元素代表的是杂波、离群点与噪声之和,即离群点在快时间序列中是孤立存在的。为便于分析,某个空时阵元对应的快时间序列可以近似表示为
(16)
式中,αli和φli(t)分别为第l个距离单元中的第i个杂波的幅度和相位;βj和γj(t)表示某个距离单元中包含的离群点幅度和相位;tl表示第l个距离单元对应的时间;tj表示包含离群点的第j个距离单元对应的时间;P表示包含离群点的距离单元数目;δ代表冲激函数;N0代表噪声。式(16)表示每个距离单元都包含Nc个杂波,每个杂波都具有不同的幅度和相位;某些特定距离单元中各自包含一个离群点;噪声按某种规律分布于所有距离单元中。
忽略噪声的条件下,快时间序列x(t)的ST结果为
(17)
由式(17)可知,某特定距离单元上的杂波和离群点ST的结果在时间维上的分布没有明显变化,各个距离单元的数据在时间维上不会相互影响。对第l个距离单元,如果其中包含离群点,则离群点对应的幅度频谱可以表示为
(18)
由式(18)可知,第l个距离单元在只包含一个离群点的情况下,其ST频谱中的相位[γ(tl)-2πftl]不会对幅度频谱造成影响,因此离群点的幅度频谱正比于频率的绝对值。第l个距离单元中杂波对应的幅度频谱可以表示为
(19)
式(19)中每个杂波的ST频谱都具有随机性相位[φ(tli)-2πftli],该相位使得在每个频率点上的Nc个杂波频谱都为随机的复数,因此它们的叠加并不一定会使总的幅度频谱增大,即
(20)
所以杂波的幅度频谱会呈现随机分布的特性。根据上述离群点和杂波的ST频谱分布特性,将快时间序列ST结果的部分高频成分舍弃可以减轻甚至去除离群点对于STAP的影响。另一方面,舍弃高频成分显然也会对杂波抑制性能造成影响,因此该算法需要在消除离群点的影响和杂波抑制性能二者之间进行折中考虑。
假设NM×L维的样本数据矩阵第i行的快时间序列xi(t)的ST为Si(f,t),其结构如同式(14)。它是K×L维的矩阵,K为频率点个数,L为快时间个数,即行代表频率而列代表时间。由于Si(f,t)的各行按照频率由高到低的顺序排列,所以舍弃高频分量即将Si(f,t)的前J行舍去,以减弱离群点的影响,则剩余部分构成一个(K-J)×L维的矩阵Fi(f,t)。所有快时间序列进行相同的处理,然后分别提取每个Fi(f,t)对应相同的列,按如下方式构成L个(K-J)×NM维的快拍时频矩阵为
(21)
计算其时频相关矩阵为
(22)
通过式(22)的相关运算,各快拍时频矩阵Ui中包含的频率信息已经被抵消,所以时频相关矩阵Rt中只包含时间和空间信息,其维数为NM×NM。文献[16]已经证明,Rt与直接由式(8)估计得到的样本数据协方差矩阵具有相同的信号子空间和噪声子空间,因此可以用Rt代替式(7)中的R来计算STAP的最优滤波权Wopt。由于在Ui中已经舍弃了离群点频谱集中的高频分量,所以Rt受离群点的影响很小。因此,由Rt得到的Wopt可以在抑制杂波的同时避免出现信号相消现象。按照上述过程计算Rt和Wopt的算法称为ST-STAP算法。
显然,Fi(f,t)中还有部分离群点频谱分量剩余,但其中杂波的频谱是主要成分。通过式(22)的相关运算之后,Rt中积累得到的杂波能量远远超过离群点的能量,因此可以达到抑制离群点的目的。另外,实际杂波的ST频谱在频率维呈现随机分布,而且影响杂波幅度和相位的因素较多,因此目前尚无法用数学表达式精确描述杂波的ST幅度频谱分布规律,只能通过仿真实验进行呈现。同时,上述处理过程需要舍弃的高频成分数目J很难通过公式推导得出,本文通过多次实验进行分析和选择。第3节将对比分析J的不同取值对于ST-STAP算法性能的影响。
3性能分析
本节将通过实验仿真分析ST-STAP算法的性能。主要仿真参数为:N=10; M=10; λ=0.3m; H=3 000m; va=300m/s; fr=4 000Hz; 杂噪比为60dB;离群点的信噪比为40dB。以下仿真结果均为100次蒙特卡罗实验的平均结果。
3.1杂波与离群点ST频谱分析
仿真实验选取了101~300号距离单元的采样数据,在第130、180、230和260号距离单元内各包含一个离群点。采样数据构成形同式(15)的数据矩阵,从中随机抽取某一行作为仿真用的快时间序列,其ST时频分布如图3所示。为了体现离群点、杂波和噪声的幅度频谱分布特性的不同,将它们的幅度频谱分别绘制于图4~图6中。
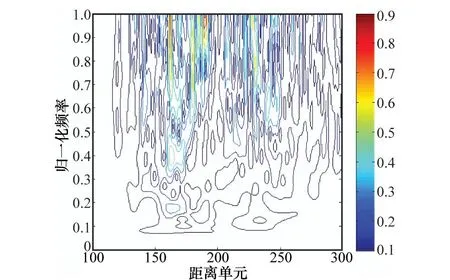
图3 快时间序列的ST谱
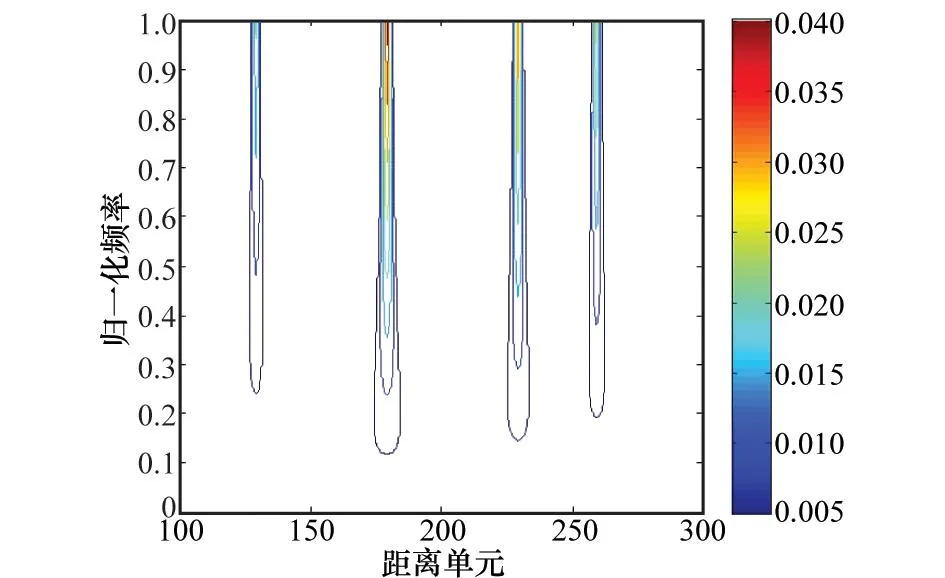
图4 离群点的ST谱

图5 杂波的ST谱

图6 噪声的ST谱
可以看出,离群点的幅度频谱只分布在对应的距离单元中,并按照正比例关系沿频率维分布;而杂波的幅度频谱在时频平面上呈现随机分布,其在频率维的分布并非集中于高频段;噪声的幅度频谱非常微弱,在后续的分析中可以忽略。为了进一步对比杂波和离群点的频谱分布,分别提取第130、180、230和260号距离单元对应的杂波频谱和离群点频谱,结果如图7~图10所示。如果将归一化频率的0~0.5看作低频段,而0.5~1看作高频段,则分别计算上述4个距离单元中杂波的频域能量比重,结果如表1所示。可以看出,低频段的杂波能量比重超出高频段一倍左右。比较而言,离群点的频谱在高频段较为集中,而杂波的频谱分布较为均匀。因此,实验的结果与式(18)和式(19)推导出的结果相符。
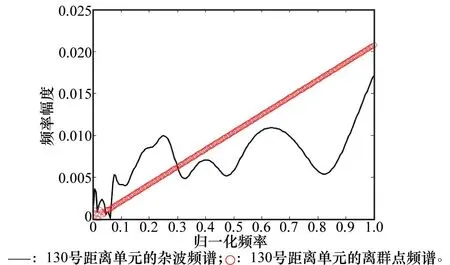
图7 130号距离单元的杂波与离群点频谱

图8 180号距离单元的杂波与离群点频谱
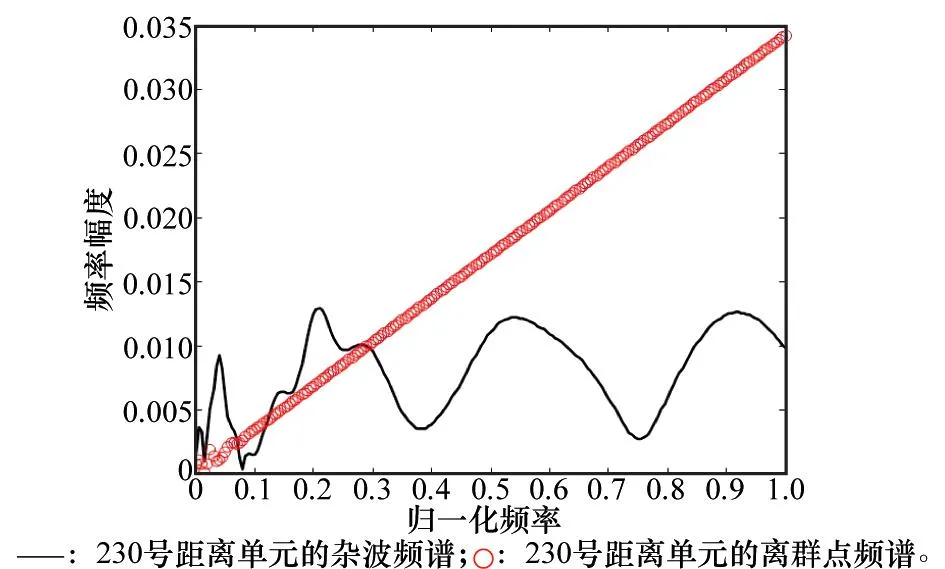
图9 230号距离单元的杂波与离群点频谱
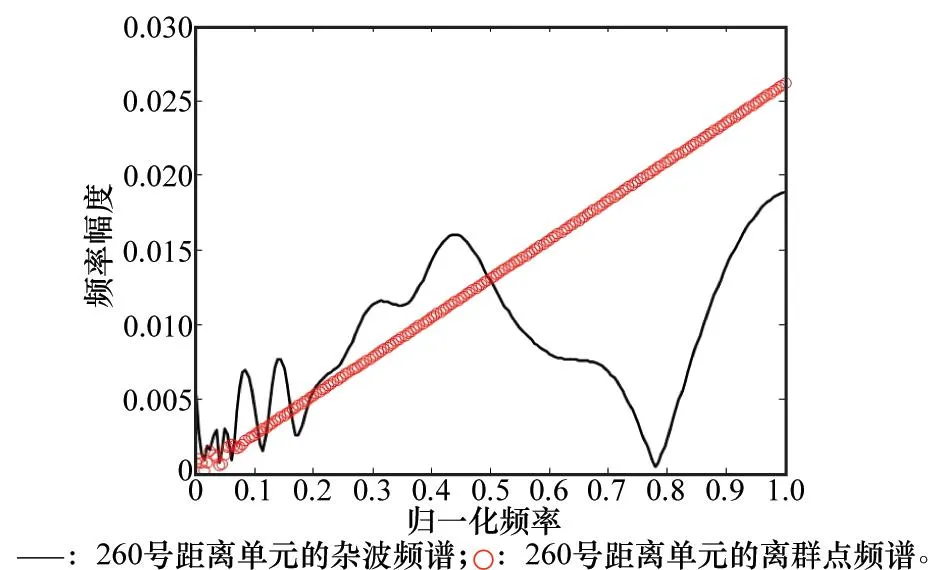
图10 260号距离单元的杂波与离群点频谱
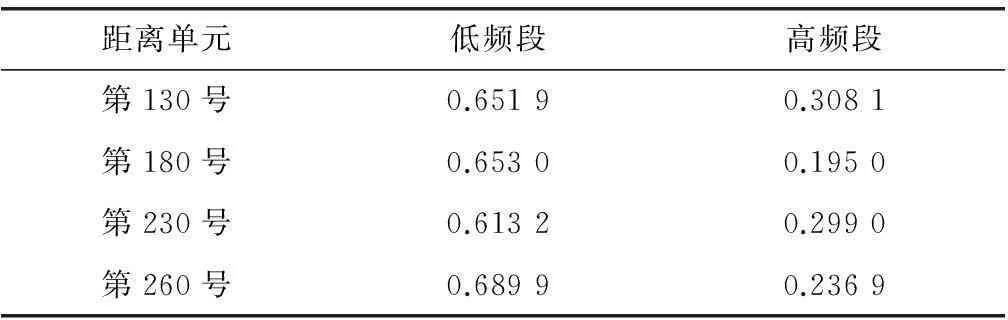
距离单元低频段高频段第130号0.65190.3081第180号0.65300.1950第230号0.61320.2990第260号0.68990.2369
3.2舍弃高频分量数目J的选择
ST-STAP算法中非常关键的一个问题是快时间序列的ST中需要舍弃的高频分量数目J的选择。根据上述分析,J很难通过公式推导得出,这里先依据多次实验选取。首先考虑样本数据集中包含单个离群点的情况。仿真实验选取200个距离单元的采样数据,其中包含一个离群点。传统STAP算法的归一化改善因子(normalized improvement factor, NIF)在杂波对应的多普勒频率处形成零陷,也可能在离群点对应多普勒频率处形成零陷。根据稳健STAP的要求,NIF在杂波多普勒频率处的值越小越好,在其他位置的值应该为0 dB。图11为杂波和离群点对应多普勒频率位置的NIF值与J之间的对应关系。

图11 单离群点时J对NIF的影响
由图11可以看出,在舍弃了约10个高频点之后,离群点对应多普勒频率位置不再产生零陷,而杂波多普勒频率位置的NIF约为-75 dB,此时算法的杂波抑制性能较好。
当样本数据集中包含多个离群点时,主要考虑两种情况:一是多个离群点的多普勒频率相同;二是离群点的多普勒频率各不相同。对于第一种情况,考虑200个距离单元中包含4个多普勒频率相同的离群点,杂波和离群点对应多普勒频率位置的NIF值与J之间的对应关系如图12所示。
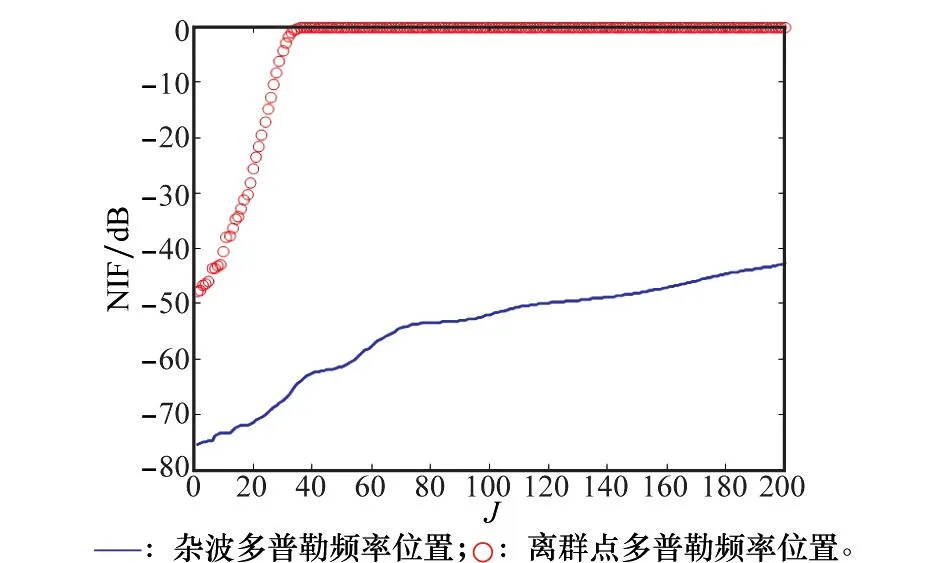
图12 多个频率相同离群点时J对NIF的影响
由图12可以看出,由于离群点数目的增多,其对应多普勒频率处的最大零陷加深了约20 dB,大约舍弃了30个高频点之后才能保证将动目标的影响完全消除,而此时杂波多普勒频率位置的NIF约为-65 dB,说明算法对杂波的抑制性能依然较好。对于第2种情况,考虑200个距离单元中包含4个多普勒频率各不相同的离群点,杂波和离群点对应多普勒频率位置的NIF值与J之间的对应关系如图13所示。
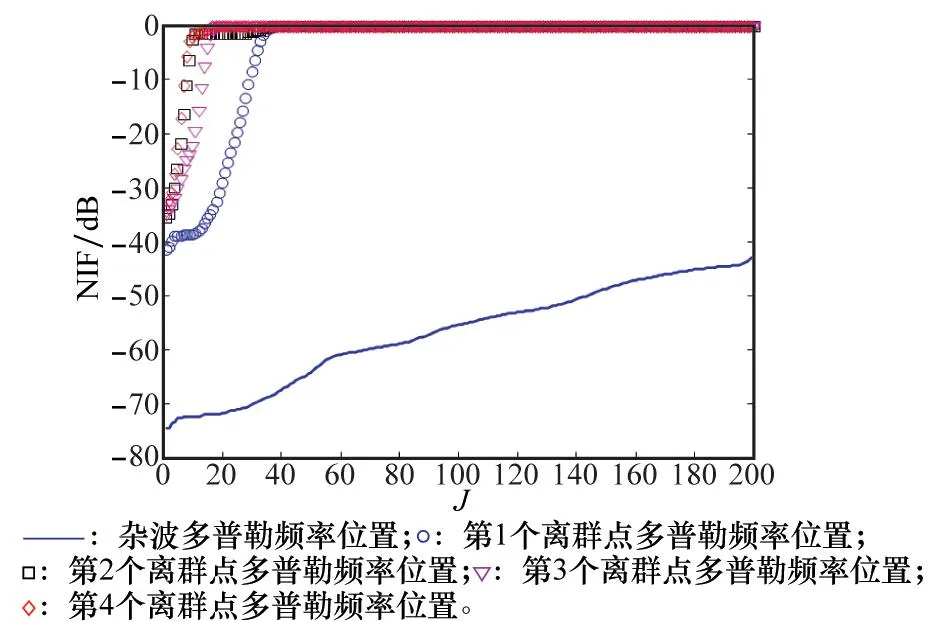
图13 多个频率不同离群点时J对NIF的影响
由图13可以看出,4个不同多普勒频率的离群点对应产生了4个零陷,舍弃大约30个高频点之后,离群点的影响被完全消除而杂波的抑制性能可以达到-70 dB。
综合以上情况,ST-STAP算法中需要舍弃的高频点数目与离群点的个数和多普勒频率有关。当离群点的数目较多时,需要舍弃的高频分量较多,则算法的杂波抑制性能会有一定的下降。J的选择需要在抑制离群点的影响和保证杂波抑制能力之间进行折中。由上述仿真可知,J分别取10和30时,算法的杂波抑制性能差别不超过10 dB,因此后续所有关于ST-STAP算法性能的分析中,每个快时间序列的ST时频矩阵均舍弃30个高频点。
3.3快拍数对算法性能的影响
ST的频率分辨率与序列长度成正比,而ST-STAP算法需要舍弃快时间序列ST中的若干高频点,因此快拍数目会直接影响算法的性能。这里分析快拍数目为20~200时系统的性能。图14为样本数据包含一个离群点时杂波和离群点多普勒频率位置的NIF随快拍数目的变化。图15为样本数据包含4个相同多普勒频率的离群点时相关多普勒频率位置的NIF随快拍数目的变化。图16为样本数据包含4个不同多普勒频率的离群点时相关多普勒频率位置的NIF随快拍数目的变化。可以看出,快拍数小于40的情况下,ST-STAP算法无法克服离群点的影响。而随着快拍数的增多,杂波的抑制性能增强,同时在舍弃30个高频点的情况下,ST-STAP算法可以完全克服多个离群点的影响。
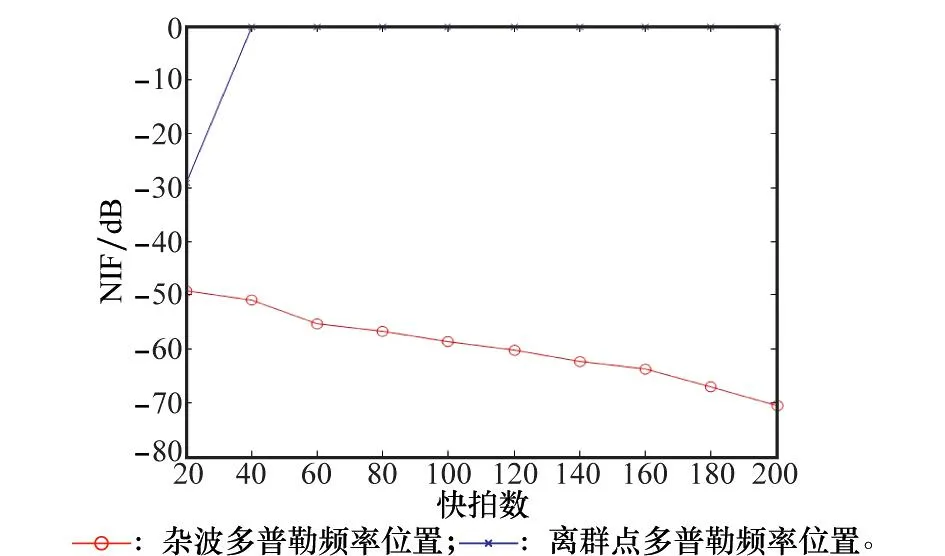
图14 单离群点时快拍数对NIF的影响
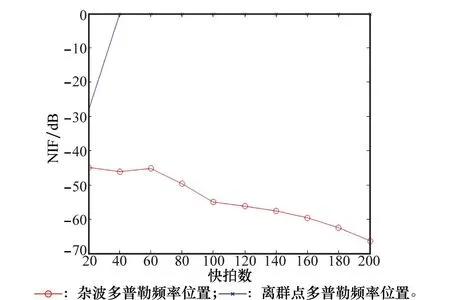
图15 多个频率相同离群点时快拍数对NIF的影响
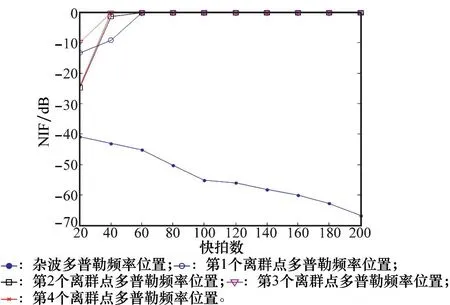
图16 多个频率不同离群点时快拍数对NIF的影响
3.4ST-STAP算法的稳健性
仿真首先采用101~300号距离单元的采样数据作为训练样本,其中包含有4个离群点。离群点的归一化多普勒频率范围为0.62~0.72。ST-STAP、SMI-STAP、DL-STAP和GIP-STAP算法分别利用该训练样本形成最优滤波权。图17为4种STAP算法的NIF与多普勒频率的关系曲线。由于多个强离群点的干扰,SMI-STAP、GIP-STAP和DL-STAP均在离群点多普勒频率位置产生了较深的零陷,表示其对于动目标信号也具有一定程度的抑制作用;而ST-STAP只在主杂波区形成深度为80 dB的零陷,体现出很好的杂波抑制性能。

图17 NIF与多普勒频率的关系
为了检测算法的动目标检测性能,301~400号距离单元的采样数据作为测试样本。在第350号距离单元处注入一个动目标信号,其信噪比为10 dB,归一化多普勒频率为0.65。分别使用上述4种STAP 算法形成的最优滤波权对测试样本进行滤波,得到的输出功率如图18所示。可以看到,由于离群点导致的目标相消,SMI-STAP算法未检测出动目标信号;ST-STAP算法的动目标输出功率比DL-STAP和GIP-STAP高约15 dB。因此ST-STAP算法具有更好的动目标检测性能。
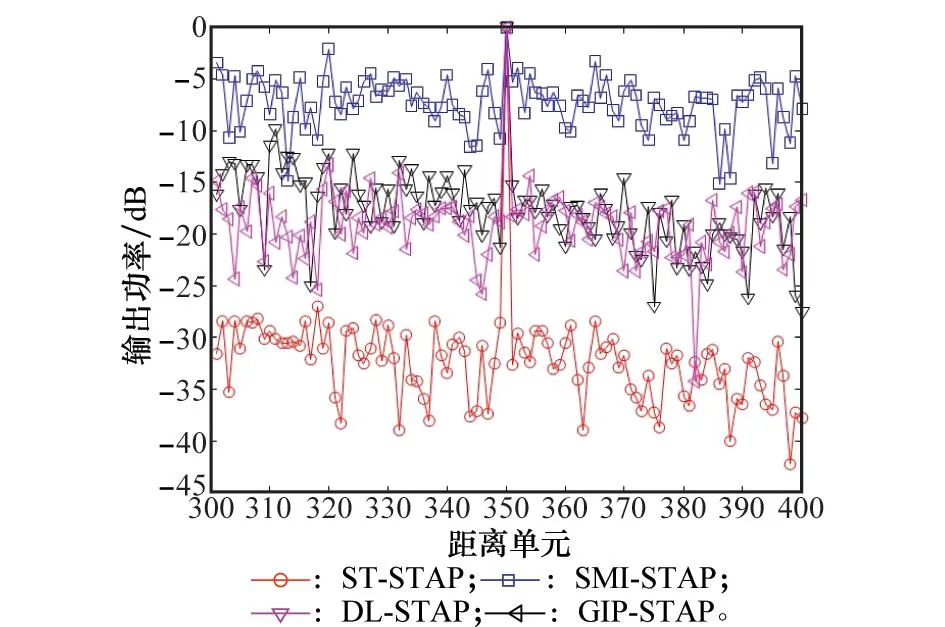
图18 输出功率
4结论
针对训练样本数据中包含离群点而造成杂波环境非均匀的情况,本文研究了基于S变换的稳健STAP算法。ST-STAP算法利用了时频分布中杂波的频谱为随机分布、而离群点的频谱集中在高频段的特点,先舍弃快时间序列ST时频矩阵的部分高频分量,然后计算其时频相关矩阵,则可以有效消除离群点的影响。ST-STAP算法在训练样本中包含多个强离群点的情况下,形成的最优滤波权对测试样本滤波后的动目标输出功率比其余方法大,动目标检测的准确率较高。因此ST-STAP算法与其他几种方法相比稳健性更好,更适合于实际的杂波环境。
参考文献:
[1] Zhang B H, Zhang Y S, Wang Y L. Clutter suppression method based on estimation of inverse covariance matrixes[J].SystemsEngineeringandElectronics,2011,33(5):1027-1031.(张柏华,张永顺,王永良.基于逆协方差矩阵估计的杂波抑制方法[J].系统工程与电子技术,2011,33(5):1027-1031.)
[2] Reed I S, Mallet J D, Brennan L E. Rapid convergence rate in adaptive arrays[J].IEEETrans.onAerospaceandElectronicSystems, 1974, 10(6): 853-863.
[3] Liu C F, Liao G S. Robust generalized inner products algorithm using diagonal loading[J].JournalofXidianUniversity, 2009, 36(4): 583-589. (刘聪锋,廖桂生.稳健的对角加载广义内积算法[J].西安电子科技大学学报, 2009, 36(4): 583-589.)
[4] Cheng X J. Direct data domain space time adaptive processing algorithm for non-homogeneous clutter[J].ComputerEngineeringandApplications, 2015, 51(5): 217-221. (程向娇.非均匀杂波中的直接变换域STAP算法研究[J].计算机工程与应用, 2015, 51(5): 217-221.)
[5] Cao J S, Wang X G. Diagonally loaded SMI algorithm based on inverse matrix recursion[J].SystemsEngineeringandElectronics, 2007, 18(1): 160-163.
[6] Zhou Y, Zhang L R, Liu N, et al. Knowledge aided secondary data selection in space time adaptive processing[J].SystemsEngineeringandElectronics,2010,32(2):405-409.(周宇,张林让,刘楠,等.空时自适应处理中基于知识的训练样本选择策略[J].系统工程与电子技术,2010,32(2):405-409.)
[7] Tong Y L, Wang T, Dai B Q, et al. Heterogeneous clutter suppression method based on the knowledge of clutter ridge[J].SystemsEngineeringandElectronics, 2015, 37(5): 1035-1041. (同亚龙,王彤,代保全,等.基于杂波脊先验信息的非均匀杂波抑制方法[J].系统工程与电子技术,2015, 37(5): 1035-1041.)
[8] Yang Z C, Li X, Wang H Q, et al. Adaptive clutter suppression based on iterative adaptive approach for airborne radar[J].SignalProcessing, 2013, 93: 3567-3577.
[9] Wang Y L, Liu W J, Xie W C. Research progress of space-time adaptive detection for airborne radars[J].JournalofRadars, 2014,3(2):201-207.(王永良,刘维建,谢文冲.机载雷达空时自适应检测方法研究进展[J].雷达学报,2014,3(2):201-207.)
[10] Xiang C, Feng D Z, Cao Y, et al. Three-dimensional spatial-temporal dimension-reduced adaptive processing for airborne radar[J].SystemsEngineeringandElectronics, 2011, 33(3): 548-552.(向聪,冯大政,曹杨,等.机载雷达三维空时降维自适应处理[J].系统工程与电子技术,2011,33(3):548-552.)
[11] Fan H Y, Jiang Y M, Kuang G Y. Target detection in non-stationary clutter background and Riemannian geometry[J].IETRadar,SonarandNavigation, 2014, 8(4): 376-381.
[12] Zhuang J, Manikas A. Interference cancellation beamforming robust to pointing errors[J].IETSignalProcessing, 2013, 7(2): 120-127.
[13] Yang X P, Liu Y X, Long T. Robust non-homogeneity detection algorithm based on prolate spheroidal wave functions for space-time adaptive processing[J].IETRadar,SonarandNavigation,2013,7(1):47-54.
[14] Zhu M Z, Ji H B, Lin L. Instantaneous frequency estimation of multi-component FM signals based on directional S transform[J].SystemsEngineeringandElectronics, 2013, 35(1): 29-33. (朱明哲,姬红兵,林琳.基于方向性S变换的多分量FM信号瞬时频率估计[J].系统工程与电子技术,2013,35(1):29-33.)
[15] Sun Z S, Wang J, Bi Y X, et al. Analysis of multi-human micro-Doppler signatures based on generalized S transform[J].SystemsEngineeringandElectronics,2014,36(7):1291-1297.(孙忠胜, 王俊, 毕严先, 等.基于广义S变换的多人微多普勒特征分析[J].系统工程与电子技术,2014,36(7):1291-1297.)
[16] Zhang Y M, Mu W F, Amin M G. Subspace analysis of spatial time-frequency distribution matrices[J].IEEETrans.onSignalProcessing, 2001, 49(4): 747-759.
高志奇(1980-),男,讲师,博士研究生,主要研究方向为空时自适应信号处理。
E-mail:gzqnd@163.com
陶海红(1976-),女,教授,博士,主要研究方向为阵列信号处理。
E-mail:hhtao@xidian.edu.cn
赵继超(1989-),男,博士研究生,主要研究方向为阵列信号DOA估计。
E-mail:13891894124@139.com
Robust space-time adaptive processing based on S transform for airborne radar
GAO Zhi-qi, TAO Hai-hong, ZHAO Ji-chao
(NationalLabofRadarSignalProcessing,XidianUniversity,Xi’an710071,China)
Abstract:Performance of space-time adaptive processing (STAP) is always corrupted by outliers. Hence, a novel robust STAP algorithm based on the S transform (ST) is proposed. It exploits the characteristic that ST spectrum distribution of the outlier is different from the clutter in the time-frequency domain. Firstly, the fast time sequence is transferred to the time-frequency matrix by ST. Some high frequency points of the ST matrix are abandoned to eliminate outliers. Then the remainder of the ST matrix is used to estimate the clutter covariance matrix and filter weight. Monte Carlo experiments prove that the proposed algorithm is more robust than other conventional STAP algorithms in non-homogeneous clutter environments.
Keywords:airborne radar; space-time adaptive processing (STAP); S transform (ST); outlier
收稿日期:2015-03-25;修回日期:2015-09-23;网络优先出版日期:2016-02-05。
基金项目:国家自然科学基金(60971108);国家重点基础研究发展计划(973计划)(2011CB707001)资助课题
中图分类号:TN 958
文献标志码:A
DOI:10.3969/j.issn.1001-506X.2016.06.08
作者简介:
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160205.1429.002.html
猜你喜欢
数字技术与应用(2019年8期)2019-12-04 04:16:01
计算机时代(2019年6期)2019-07-08 06:46:17
电脑知识与技术(2018年27期)2018-12-18 01:08:58
西部论丛(2018年8期)2018-09-03 08:41:50
电子技术与软件工程(2018年6期)2018-02-23 12:47:26
电脑知识与技术(2017年15期)2017-07-11 07:58:45
雷达学报(2017年6期)2017-03-26 07:52:56
系统工程与电子技术(2016年4期)2016-08-24 07:46:08
系统工程与电子技术(2016年7期)2016-08-21 13:59:00
电子设计工程(2015年6期)2015-02-27 12:05:03