基于EtherCAT网络的伺服造波控制系统
2016-06-16 02:16:20聂俊杰徐东亮王龙飞陈宗雨
组合机床与自动化加工技术 2016年5期
聂俊杰, 徐东亮,王龙飞,陈宗雨
(1.武汉理工大学 机电工程学院,武汉 430070;2.武汉菲仕运动控制系统有限公司,武汉 430223)
基于EtherCAT网络的伺服造波控制系统
聂俊杰1, 徐东亮1,王龙飞2,陈宗雨2
(1.武汉理工大学 机电工程学院,武汉430070;2.武汉菲仕运动控制系统有限公司,武汉430223)
摘要:介绍了TwinCAT和EtherCAT的基本特性。阐述了构建EtherCAT网络伺服造波控制系统的硬件结构和软件流程。该系统采用安装德国 Beckhoff公司的TwinCAT软件的工控机作为主站、基于伦茨EtherCAT的数字伺服驱动器I700作从站、菲仕同步交流伺服电机U725.20.3作执行机构。对 EtherCAT 的主从站进行了一系列的配置,编写 TwinCAT PLC 程序,结合驱动器的 PID 算法,实现了造波板的高精度同步。
关键词:造波;运动控制 ;EtherCAT;TwinCAT;电子凸轮
0引言
在实验室中运用造波机精确模拟海上波浪,完成各种实验,为科学研究和工程设计提供理论支持,是相关人士一直关心的课题[1]。造波机的基本工作原理是通过造波板的机械运动对水体施加振动产生波浪。
随着计算机技术,伺服控制技术以及现场总线技术的发展,基于现场总线的伺服控制技术已然是一种趋势。目前国际上存在40多种现场总线,而以太网具有速度快,传输数据量大的优点,因此,将以太网技术引入造波机领域,能够较大程度上改善造波机的性能。在国内,大连理工大学将以太网技术引入造波系统,构建了一个三层网络结构的多向不规则造波系统,并获得了成功。但是该系统需要在现场安装5台计算机,操作和维护极为不便[2]。因为Ethernet/IP技术存在一定的问题,它不能保证数据的实时性。而EtherCAT实时以太网技术能够满足工业现场的实时性要求。
为了提高造波系统的数据实时性,保证各个造波板之间的同步。本系统由两台上位工控机和80台双驱伺服驱动器构建了一个局域网,运用实时以太网EtherCAT实现工控机和驱动器之间的数据交互,通过控制推波板有规律的前后运动来实现各种波浪的模拟。
1TwinCAT和EtherCAT网络
TwinCAT 是Beckhoff公司的自动控制软件包。它能够在Windows NT/2000/XP/7,还有嵌入式Windows NT/XP 和 CE.NET的硬实时环境下实现。具有使用方便,界面友善,编程简单的优点。可以调节系统周期时基,最小50μs[3]。它具有强大的NC配置功能,只需一台工控机就可以控制255根轴。内置多速度控制,相位同步控制,电子凸轮控制,定位控制,多轴套准控制,降低编程难度和编程时间。强大TwinCAT NC 凸轮功能(凸轮表耦合) 库,支持多种凸轮表在线修改模式。具有强大的虚轴功能,能够轻松实现运动的模拟,只需要简单的配置就能够将工控机和伺服驱动器连接起来,缩短现场调试时间。基于TCP/IP的TwinCAT ADS通讯协议,能够简单实现TwinCAT与第三方应用程序之间的数据通讯,具有很高的兼容性,为开发者提供更多选择。
EtherCAT由德国Beckoff公司在2003年提出,并成为国际标准。EtherCAT是目前国际上领先的现场总线技术。支持多种设备连接的拓扑结构,EtherCAT中分布式时钟的运用,使得各从站节点设备可以达到小于1μs的时钟同步精度。其从站由专门的硬件实现,通信控制通过实时通道内的实时MAC接管,从而在本质上消除了报文冲突,通信数据的处理过程也得到了大大简化。通过修改以太网协议层,来保证其实时性。它已成为最流行的现场总线技术之一[4,7]。
2控制系统总体设计
2.1造波理论及对控制的要求
目前,波浪的数值生成技术大体上可以分为 3 类:一是基于求解粘性不可压缩流体NS 方程的粘性数值造波方法,二是在理想流体假设下,基于势流理论求解拉普拉斯方程的边界元方法,三是既可应用于粘性流体又可应用于理想流体的源函数造波方法。在工程实际中,理想流体是不存在的,因此第二种方法用的最为普遍[8]。造波要求造波机系统的造波精度高,重复性良好、稳定性高以及抗扰动能力强[9]。
2.2硬件组成
系统框图如图1所示。本系统由两台工控机,一个时钟模块,80个双轴驱动器,160个同步交流伺服电机组成。其中工控机选择倍福工控机,运行普通Windows 7操作系统,然后在这个操作系统下安装Beckoff 的TwinCAT软件。理论上一台工控机可以带255根轴,但由于造波对轴同步性要求特别高,咨询Beckoff的相关工程师后得知,在保证轴的同步性比较高的情况下,他们用一台工控机最多可以带120根轴左右(在优化程序的情况下)。因此在设计本控制系统时,选用了两台工控机。但是这样就会有一个新的问题,两台工控机之间如何保证时钟同步。为解决这个问题,Beckoff提供了时钟模块EL6692。单个TwinCAT系统中通过分布式时钟系统始终保持实时性同步。所有的 EtherCAT 设备自身都配备了本地时钟,在TwinCAT系统上电通讯后的纳秒级自动连续地与其它所有时钟保持同步,并且在同步后系统开始工作。两个TwinCAT系统中,各主站系统对各系统时钟进行数据交换,并且进行差值计算。 EL6692作为两个EtherCAT系统之间的一个交叉点,用作同步系统中的参考时钟,使两个系统达到同步运行。双轴驱动器选择德国LENZE公司的i700伺服驱动器。同步交流伺服电机选择意大利菲仕公司的U725.20.3电机。
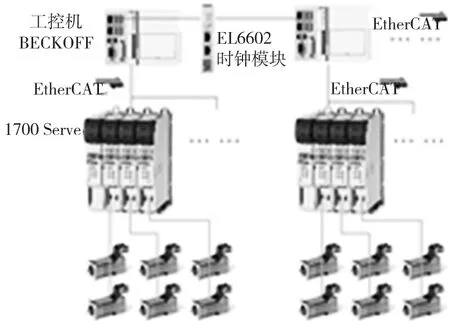
图1 控制系统框图
2.3软件设计
控制软件是基于Windows 7系统,采用TwinCAT开发的。软件流程图如图2所示。首先进行系统配置,配置完成后,根据数值造波的方法,生成造波序列,用TXT文档格式存储。选择这个文档,载入凸轮表。载入成功后,选择是否开始造波,如果选择是,则开始造波,运行TwinCAT Scope View 进行相关配置后开始采样。选择是否停止造波,如果选择是,则对采样数据进行处理和分析。

图2 软件流程图
看是否满足要求,如果不满足要求,调节驱动器内部PID参数,再开始造波,循环这个过程,直到满足要求。
伺服驱动器内部一般包含位置环,速度环,电流环,经过分析,造波主要是要求轴位置同步,因此伺服驱动器均选择位置模式。对采样数据进行处理和分析后,如果不满足要求,只需要调整位置环的PID参数,直到满足要求。调节PID参数主要通过伺服驱动器厂家提供的参数调整软件进行调整。
3控制系统难点及解决方案
在造波控制系统中,较为复杂的问题是实时数据的生成和传输以及 160根运动轴的严格同步运动。在本系统中,根据数值造波原理产生波列数据,并将它以.txt文本格式存在计算机中。在TwinCAT PLC中从这个文件装载数据。为解决TwinCAT与伺服驱动器之间快速、大量的数据交换 , 本系统采用了实时以太网EtherCAT。
轴的同步运动分为2种情况,一种是在同一个工控机内部的80根轴之间的同步运动,另一个是2个工控机之间的同步问题[10]。在本系统中为解决2个工控机之间的同步,本系统选用了倍福的时钟模块EL6692。为解决同一个工控机内部的80根轴之间的同步问题,本系统借助倍福的电子凸轮模块,同时借助了虚拟轴的概念来实现。做试验后发现,倍福的电子凸轮模块最多能耦合50根轴,本系统借助了倍福的位置外部设定值发生器来解决,解决方法如图3所示。

图3 突破电子凸轮轴限制方法
4实验
本研究以两轴为实验对象,利用示波器软件TwinCAT Scope View对造波机运行过程中(ITTC谱)两伺服轴的位移,速度进行采集。实际位移曲线如图4所示、实际速度曲线如图5所示。两伺服轴的位置误差如图6所示,速度误差如图7所示。实验结果表明两伺服轴的位置误差大约为10μs,速度误差大约为40μs,完全能够满足造波的同步性要求。
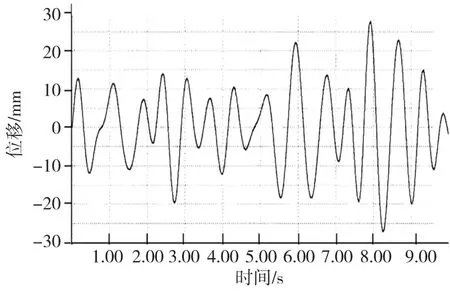
图4 两伺服轴位移曲线

图5 两伺服轴速度曲线

图6 两伺服轴位移误差(大约为10μs)

图7 两伺服轴速度误差(大约为40μs)
5结束语
本控制系统基于PC,软件资源丰富,数据处理能力强大。通过对造波机控制系统的开发,将TwinCAT和EtherCAT网络引入造波机领域,不仅提高了造波机的各项性能,大大减小了同步误差,还简化了布线,提高了系统的可靠性,简化了操作,维护方便。并通过试验证明了该方案的可行性。
[参考文献]
[1] 李木国,徐福荣. 基于SynqNet的多向不规则波造波机控制系统[J]. 测控技术,2007(10):37-39,49.
[2] 罗朝林,陈若舟,何启莲,等. 基于以太网的多向不规则造波系统设计[A]. 中国海洋工程学会.第十五届中国海洋(岸)工程学术讨论会论文集(中)[C].中国海洋工程学会,2011.
[3] 陈志军,徐东进,程志江,等. 基于TwinCAT的PLC水源地远程监控系统开发设计[J]. 电子技术应用,2008(12):95-98.
[4] 王国河,李伟光. EtherCAT冗余技术在多轴网络运动控制系统中的应用研究[J]. 组合机床与自动化加工技术,2012(1):58-61.
[5] 陈灏,宋宝,唐小琦. EtherCAT精确时钟同步技术的实现[J]. 组合机床与自动化加工技术,2014(5):69-72.
[6] Cena G, Cena G, Scanzio S, et al. A distribute-merge switch for EtherCAT networks[C]. IEEE, 2010.
[7] Stubbs J. EtherCAT: Ethernet for automation, best practices[J]. Control engineering: Covering control, instrumentation, and automation systems worldwide. 2014, 61(7): 38.
[8] 邓绍云. 数值造波技术发展现状及展望[J]. 水利科技与经济,2015(4):5-7.
[9] 刘达. 造波机系统运动控制及其网络化技术研究[D].大连:大连理工大学,2013.
[10] 张鹏,魏仁哲. 基于TRIO运动控制器的144轴运动控制系统[J]. 控制工程,2009(S2):21-23.
(编辑赵蓉)
Servo Making Wave Control System Based on EtherCAT
NIE Jun-jie1, XU Dong-liang1, WANG Long-fei2, CHEN Zong-yu2
(1.School of Mechanical and Electronic Engineering, Wuhan University of Technology, Wuhan 430070, China;2.Phase Motion Control Solution Wuhan Co.,LTD, Wuhan 430223,China)
Abstract:Introduces the basic characteristics of TwinCAT and EtherCAT. And describes the hardware structure and software of the system. Using Beckoff company's TwinCAT software as soft master device, Lenze EtherCAT-based digital servo drive I700 as slave device, Phase synchronous AC servo motor U725.20.3 as actuator, formed the system. The EtherCAT master and slave station conducted a series of configuration, and write TwinCAT PLC program, and combined with PID algorithm of the drive, the wave-maker boards have a high-precision synchronization.
Key words:making wave; motion control; EtherCAT; TwinCAT; electronic cam
文章编号:1001-2265(2016)05-0091-03
DOI:10.13462/j.cnki.mmtamt.2016.05.024
收稿日期:2015-06-26
作者简介:聂俊杰(1991—),男,湖北潜江人,武汉理工大学硕士研究生,研究方向为先进制造装备与工艺,(E-mail)1210776014@qq.com。
中图分类号:TH166;TG659
文献标识码:A
猜你喜欢
齐鲁工业大学学报(2021年3期)2021-06-23 00:45:06
数字海洋与水下攻防(2021年2期)2021-05-08 08:01:42
教育教学论坛(2020年32期)2020-09-10 12:33:21
科技资讯(2017年19期)2017-08-08 08:39:37
电脑知识与技术(2016年27期)2016-12-15 19:35:12
中国科技博览(2016年21期)2016-11-14 22:07:20
科学与财富(2016年11期)2016-06-12 19:05:30
舰船科学技术(2016年1期)2016-02-27 15:39:16
企业导报(2015年15期)2016-01-18 08:49:07
集美大学学报(自然科学版)(2015年6期)2015-03-03 08:12:27