基于差分GPS定位的跟驰数据调查研究
2016-06-08 03:28:56杨龙海龚节坤赵顺
公路与汽运 2016年3期
关键词:智能交通
杨龙海,龚节坤,赵顺
(哈尔滨工业大学交通科学与工程学院,黑龙江哈尔滨 150090)
基于差分GPS定位的跟驰数据调查研究
杨龙海,龚节坤,赵顺
(哈尔滨工业大学交通科学与工程学院,黑龙江哈尔滨 150090)
摘要:应用Trimble R8 GPS对试验车辆实现差分定位,对定位数据在运动和静止状态下进行误差分析,并在起动加速、减速停止和常态行驶3种行驶状态对GM跟驰模型参数进行标定。误差分析和标定结果表明,差分定位数据精度能满足跟驰行为分析的要求,而且能应用于不同驾驶员在不同驾驶环境中的驾驶特性研究。
关键词:智能交通;差分GPS定位;数据调查;GM模型;参数标定
随着GPS定位技术的迅速发展和定位精度的提升,GPS为车辆跟驰数据的采集提供了一种新的可靠方法。国内外目前有多种方法对车辆的跟驰数据进行采集,应用最多的是美国公路署免费提供的NGSIM数据。在国内外的研究中,NGSIM数据被广泛应用于跟驰模型参数标定和模型可行性验证,但应用国外的跟驰数据来研究国内的跟驰行为必将导致研究结果失真。通过数学变换,微观的跟驰行为可以变换成宏观交通流模型,通过检测路段的宏观交通量来标定微观跟驰的参数可减少跟驰数据调查工作量,但这种检测方法标定的跟驰模型参数误差较大,且不能反映驾驶员的反应时间问题。为了将宏观交通数据和微观交通数据结合起来研究跟驰行为,采用电子线圈检测器和数码摄像机同时采集路段速度和密度数据,但检测数据仍不足以研究详细的跟驰行为。通过车载GPS获取车辆运行的微观数据是一种比较省时省力的跟驰数据采集方法,但检测精度的不足限制了其在车辆微观分析中的应用。通过流动基站采集的差分GPS数据可将车辆位置信息的检测精度缩小到厘米级别,其速度、加速度和车间距检测精度能满足跟驰行为分析的需求。该文应用Trimble R8 GPS接收机与固定基站实时传输流动站数据以实现差分定位,对检测的差分定位数据在静止和运动状态下作误差分析,并应用差分定位数据对GM模型进行标定和分析。
1 调查方法
调查使用的GPS设备包括基站、Trimble R8 GPS接收机、流动站手簿。R8 GPS接收机在基站的辐射半径(70 km)内快速达到RTK作业模式,该模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站,流动站不仅通过数据链接收来自基准站的数据,还采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级精度的定位结果。通过USB转9针串口线连接接收机与笔记本电脑进行定位信息传输和存储,输出频率可在1~20 Hz选择。
在城市道路中,车辆的行驶状态分为车辆起动、减速停止和常态行驶三类。GPS数据的检测精度受环境的影响较大,特别是楼房的遮挡,故选取哈尔滨市南岗区道路宽阔且道路两侧楼房稀少的长江路进行城市道路跟驰试验。长江路沿途有多个信号交叉口,在交叉口前后,车辆的减速停止和起动数据均可获得,在交叉口之间的路段可获取正常行驶的跟驰数据。
不同驾驶员的驾驶特性存在较大差异。为了分析不同驾驶员的驾驶特性,分别选取包含激进、正常和保守驾驶习惯的4名驾驶员进行跟驰试验,试验中4辆车在同一车道上保持车队行驶。在试验过程中,车队容易被邻近车道的非试验车辆加塞,为了避免车辆加塞影响跟驰数据的有效性,在4辆试验车上安装行车记录仪对车辆的跟驰行为进行监控。GPS流动站安装如图1所示。
2 误差分析
2.1双GPS定位误差分析
差分GPS在任何时刻都存在系统误差,且误差具有方向性,误差的方向受定位卫星和GPS接收机所处环境等因素的影响。试验所采用的4台GPS接收机在同一时刻应用的定位卫星和数据接收环境不尽相同,所以同一时刻不同GPS接收机的误差各异。
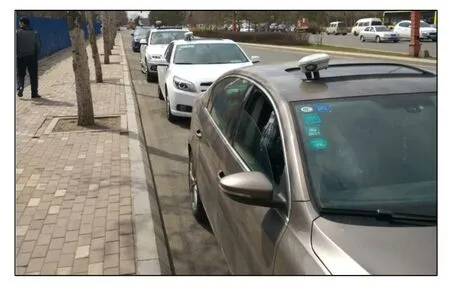
图1 GPS流动站安装
跟驰数据中的车间距根据前导车和跟驰车的坐标求解,2台GPS接收机的定位误差之和决定车间距误差的大小。为了验证2台GPS接收机定位误差之和的大小,在哈尔滨二环路进行基础试验。试验仪器为Trimble R8 GPS接收机2台、笔记本电脑2台,试验条件为天气晴朗、道路两侧无遮挡。将2台GPS主机安装在同一台车上,用米尺测得两天线中心的间距,数据输出频率为10 Hz,共获得约9 849个点,去掉由于天桥和高架遮挡下的信号丢失,筛选出9 700个有效点。图2为不同速度下2台接收机的误差和散点。
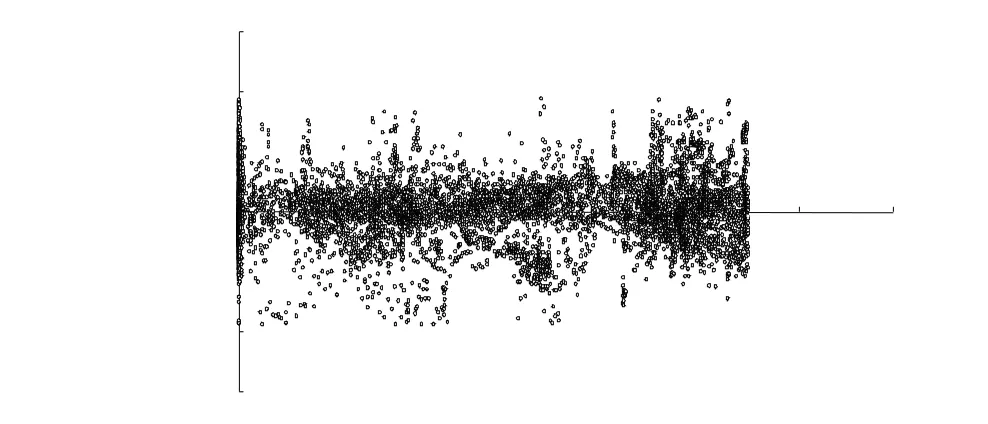
图2 不同速度下接收机测距误差散点图
由于车辆在跟驰过程中速度处于不断变化的状态,由图2可以看出:在不同速度下,接收机定位误差不超过10 cm,完全满足车辆跟驰模型研究中对位置信息的要求。不同速度下流动站定位误差统计结果如表1所示。
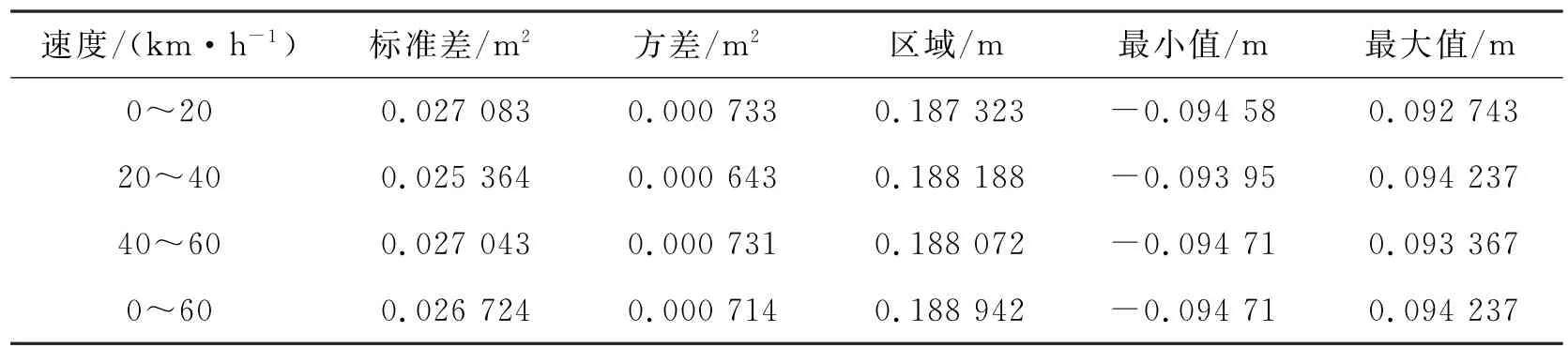
表1 不同速度下误差统计结果
从表1可看出:不同速度区间下,误差统计量有一定差距,车间距(跟驰车与前导车GPS接收机之间的距离)大于5 m,因此定位误差对车间距的影响可忽略不计。
根据误差传播定律,设单个GPS定位中误差为a,测距的中误差为b,则有:

在大量数据样本下,可认为标准差近似等于中误差,则根据式(1)可求得不同速度下单个GPS接收机的定位误差(如表2所示)。

表2 不同速度下中误差统计
由表2可看出:在不同速度下,虽然测距的中误差有一定差别,但这种差异性反映到单个GPS接收机已不再明显,且单个GPS定位中误差均小于0.02 m,相对于车辆的运动可以忽略不计。
2.2单GPS定位误差分析
车辆运行速度和加速度通过当前车辆上的差分GPS数据求解得到,差分GPS定位精度决定速度和加速度的计算精度。从表2可知:GPS在不同移动速度下的定位误差分布存在微小差别,但可忽略,故可以认为单GPS定位误差不受速度的影响。车辆瞬时速度的计算有以下两种方法:
式中:(xt, yt) 表示时刻t试验车辆的高斯坐标。
为了验证差分GPS的定位精度,选取车辆在路口等待信号灯时的GPS数据进行分析。根据GPS原始数据状态信息,筛选出稳定差分定位的983条数据,车辆静止,车辆的位移为零,根据前后两个时间点对应的经纬度计算出的移动距离即为GPS的定位误差,即图3和图4中0.1 s对应的定位误差。图中0.2 s对应的误差数据为利用当前时刻前后0.1 s坐标数据计算车辆瞬时速度时的定位误差。
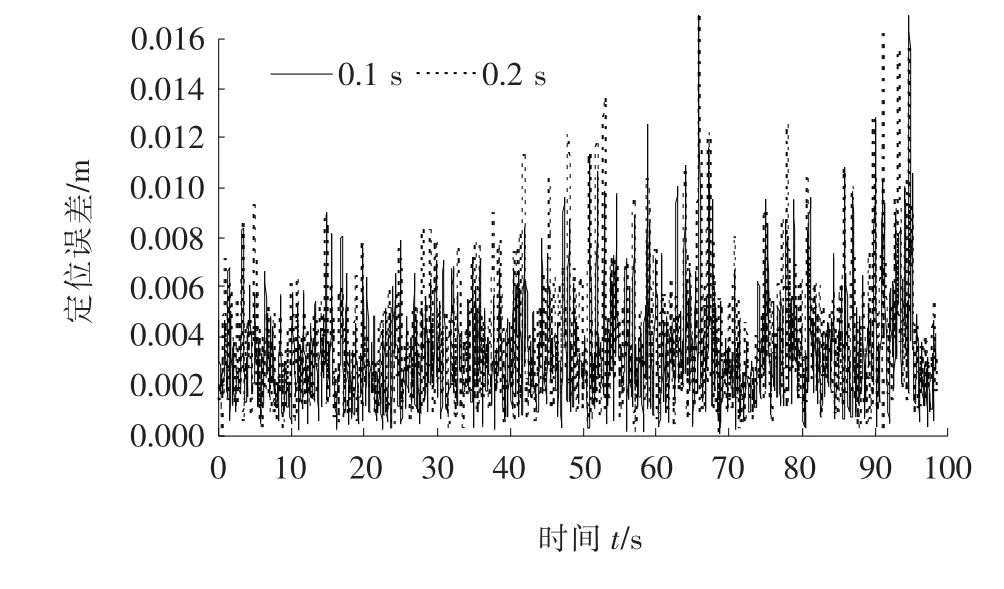
图3 单个GPS的定位误差
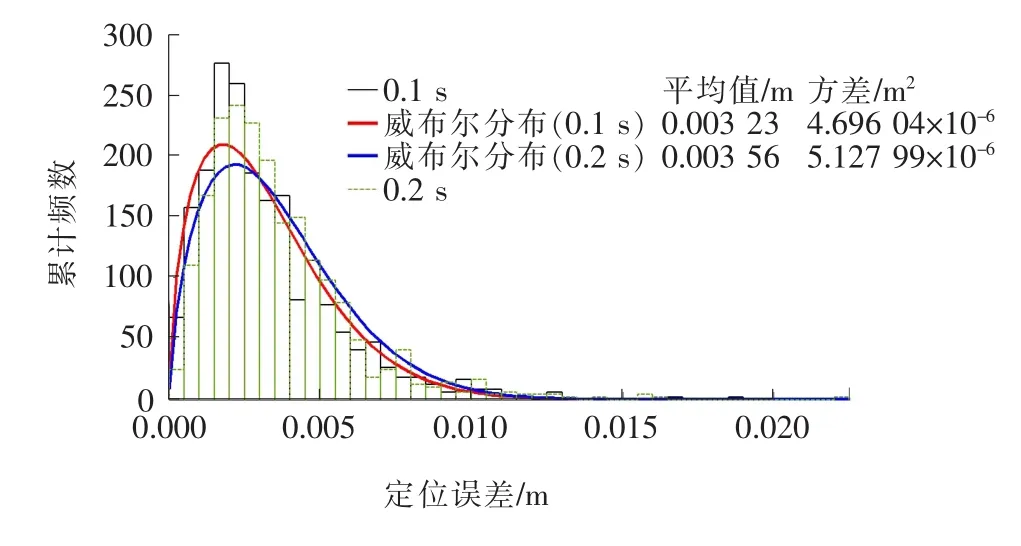
图4 单个GPS的定位误差分布
图3和图4显示的是试验应用的一台GPS接收机的定位误差,其他3台GPS接收机的定位误差分布与图3和图4相同,定位误差平均值为0.3 cm左右,最大定位误差不超过2.23 cm。这里的误差平均不是GPS定位经纬度与真实经纬度的误差,而是前后两个定位点之间的误差,因为误差存在方向,而且相邻时间节点的误差方向一致,所以单GPS定位误差平均值小于定位中误差。
令0.1和0.2 s对应的定位误差分别为ε1、ε2,假设车辆短时区间(t-0.1,t+0.1)内匀速行驶,行驶距离为2d,则利用式(2)计算速度的相对误差εv1=ε1/d,利用式(3)计算速度的相对误差εv2=ε2/ (2d)≈1/2εv1,式(3)计算所得速度误差小于式(2)的速度误差。不同速度下瞬时速度的相对误差如表3所示,其精度能满足跟驰行为分析的要求。
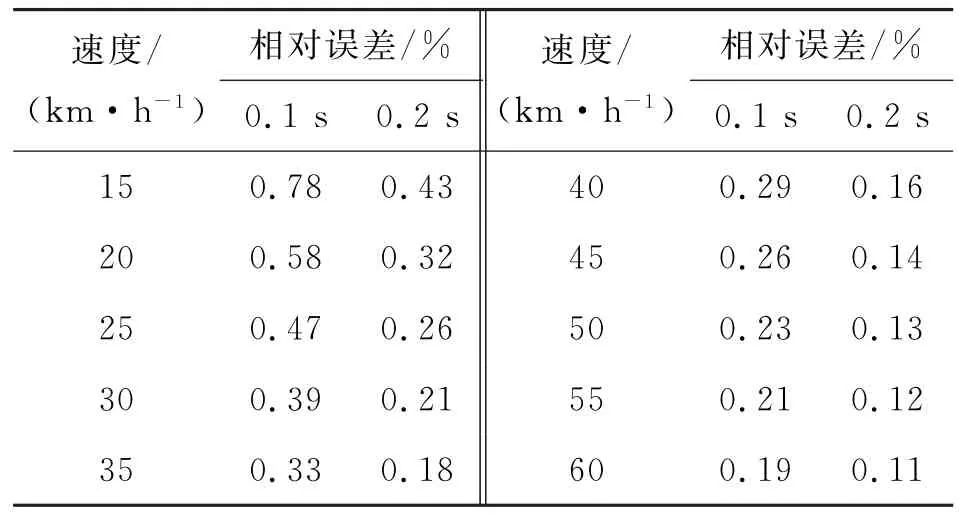
表3 不同瞬时速度下速度的平均相对误差
3 跟驰行为分析
GM模型是一种较常用的跟驰模型,已有研究先后用NGSIM数据和GPS数据标定过GM模型,证明GM模型能较好地反映车辆在起动、减速停止和正常行驶状态下的跟驰行为。GM模型形式为:

式中:an(t+T)为跟驰车在t+T时刻的加速度;T为驾驶员的反应时间;λ、m和l为待标定的系数;vnt(+T)为t+T时刻跟驰车速度;xnt()、xn-1(t)分别为t时刻跟驰车和前导车的位置;vn(t)、vn-1(t)分别为t时刻跟驰车和前导车的速度。
试验中,车队由4辆车组成,可获取3对跟驰数据,每对数据分别对应不同驾驶特性的驾驶员,每对跟驰数据包含起步、减速停止和正常行驶3种状态,选取每个状态下的稳定差分定位数据对GM模型进行标定,结果如表4和表5所示。
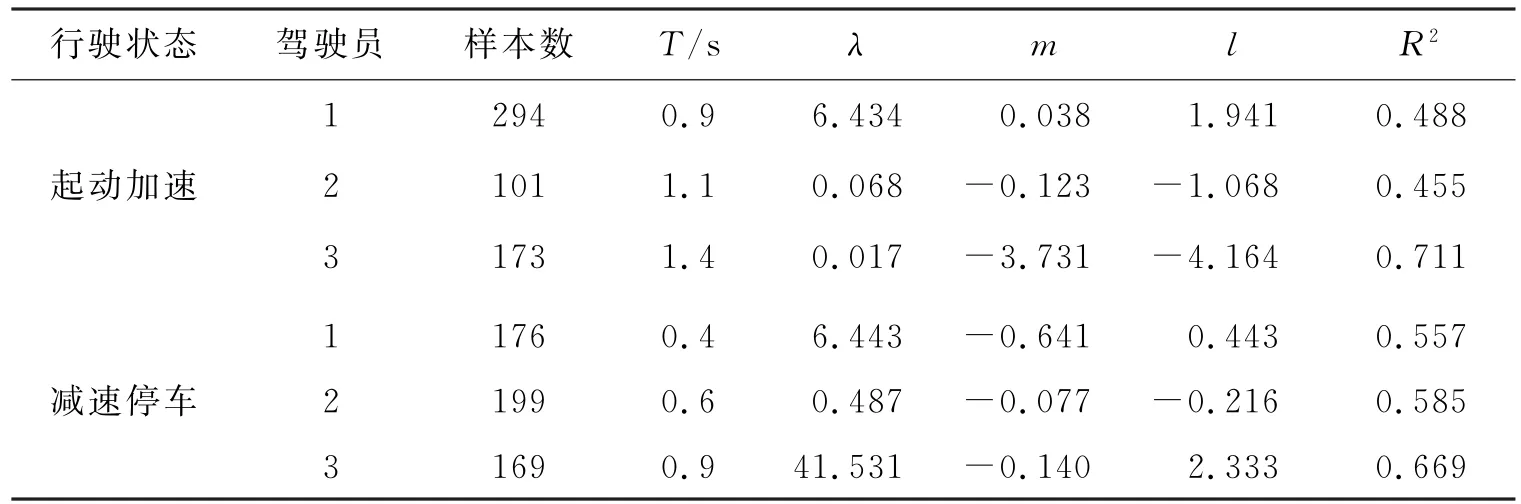
表4 GM模型参数标定

续表4

表5 常态行驶状况下GM模型参数标定结果
试验选取的标定数据为每种状态下连续的跟驰数据。从表4、表5来看,标定结果较理想,相关性系数较高,说明通过差分GPS定位调查的跟驰数据可用来研究跟驰行为。对比表4中起动加速和减速停车状态下驾驶员的反应时间,驾驶员起动加速时的反应时间大于减速停车的反应时间,起动加速的驾驶员反应时间大于减速停车的驾驶员反应时间,因为驾驶员在起动加速状态下较放松,针对前车速度、车间距变化的反应较慢,而在减速制动下,驾驶员为了保证行车安全,对于前车制动反应较灵敏。
在起动加速状态下,3个驾驶员在同一路段进行跟驰试验,但从标定参数来看,相同道路环境下不同驾驶员对应的模型参数不一样,说明驾驶员特性对跟驰行为有一定影响。减速停止和常态行驶状态下的模型参数标定结果也说明驾驶员特性对跟驰行为存在一定影响。根据起动加速和减速停止的标定结果可推断驾驶员1属于较激进的驾驶员,驾驶员3属于较保守的驾驶员,这一推断结果与试验车上对应驾驶员的特性符合,证明通过差分GPS获取的跟驰数据可用来研究跟驰行为中驾驶员特性。
从表4来看,在常态行驶状态下,1.2 s的驾驶员反应时间对应的模型参数标定结果较理想。但从表5来看,驾驶员3在1.4 s的反应时间下GM模型对其在常态行驶下的跟驰行为模拟更精确。与其他两种行驶状态相比,驾驶员在常态行驶状态下的反应时间较长,主要是因为常态行驶下车间距较大,跟驰车辆驾驶员对前导车的速度变化反应较迟缓。
4 结论
(1)通过平滑处理后的差分GPS数据在静止和运动状态下的定位精度能达到厘米级别,用差分GPS数据求解的车间距、速度和加速度精度能满足跟驰行为分析的要求。
(2)应用平滑后的差分GPS数据对GM模型在起动加速、减速停止和常态行驶3种状态进行参数标定,参数标定结果表明差分GPS数据不仅可用来标定模型、检验模型和修正模型,还可用来研究跟驰行为中的驾驶员特性。
(3)差分GPS定位的跟驰数据采集方法可采集高精度的车辆跟驰数据,为研究道路交通提供基础数据,而且较视频采集法方便、省力。
参考文献:
[1] 王殿海,金盛.车辆跟驰行为建模的回顾与展望[J].中国公路学报,2012,25(1).
[2] 王殿海,陶鹏飞,金盛,等.跟驰模型参数标定及验证方法[J].吉林大学学报:工学版,2011,41(增刊1).
[3] 陶鹏飞,金盛,王殿海.基于人工势能场的跟驰模型[J].东南大学学报:自然科学版,2011,41(4).
[4] May Keller.Non-integer car following model[J].Highway Research Record,1967,199.
[5] Tang T Q,Li J G,Huang H J,et al.A car-following model with real-time road conditions and numerical tests[J].Measurement,2014,48(1).
[6] Soria I,Elefteriadou L,Kondyli A.Assessment of carfollowing models by driver type and under different traffic,weather conditions using data from an instrumented vehicle[J].Simulation Modelling Practice and Theory,2014,40(1).
[7] 张智勇,荣建,任福田,等.车辆跟驰时间序列实测数据采集方法研究[J].公路交通科技,2004,21(12).
[8] 喻丹.机动车驾驶人行为建模及可靠性分析[D].长沙:长沙理工大学,2011.
[9] 乔晋.车辆跟驰模型参数标定与验证研究[D].上海:上海交通大学,2008.
[10] 姜军,陆建.基于Helly跟驰模型标定参数的跟驰行为分析[J].武汉理工大学学报:交通科学与工程版,2015,39(2).
[11] 赵淑芝,张枭雄,贾洪飞,等.利用五轮仪实验数据建立车辆跟驰模型[J].公路交通科技,2003,20(1).
[12] 潘玲.基于驾驶员认知过程的车辆跟驰模型的建立[D].长春:吉林大学,2006.
[13] 刘岩,王殿海,韩萍.模拟弹簧车辆跟驰模型参数的标定[J].大连交通大学学报,2011(1).
[14] 曹金亮,史忠科,房雅灵.基于城市主干路交通流数据的跟驰模型标定[J].交通信息与安全,2014,32(6).
中图分类号:U491.2
文献标志码:A
文章编号:1671-2668(2016)03-0034-04
收稿日期:2015-05-15
猜你喜欢
计算机应用(2016年12期)2017-01-13 01:41:32
物联网技术(2016年11期)2017-01-12 21:49:02
中国管理信息化(2016年21期)2016-12-27 15:13:52
现代商贸工业(2016年14期)2016-12-27 14:32:16
科技创新与应用(2016年34期)2016-12-23 15:54:44
电子技术与软件工程(2016年20期)2016-12-21 09:28:29
电子技术与软件工程(2016年19期)2016-12-19 18:42:01
电子技术与软件工程(2016年19期)2016-12-19 17:08:08
数字技术与应用(2016年9期)2016-11-09 23:02:51
科学与财富(2016年28期)2016-10-14 04:43:28