基于ARM的遥控搬运机器人系统的研究与设计
2016-06-06 08:56陶成健王赫妍高庆忠
沈阳工程学院学报(自然科学版) 2016年2期
王 斌,李 忱,陶成健,王赫妍,高庆忠
(1.沈阳工程学院 自动化学院,辽宁 沈阳 110136; 2.国网法库县供电公司 配电工区,辽宁 沈阳 110400;3.国网辽宁省电力有限公司计量中心 资产配送部,辽宁 沈阳 110168)
基于ARM的遥控搬运机器人系统的研究与设计
王斌1,李忱2,陶成健1,王赫妍3,高庆忠1
(1.沈阳工程学院 自动化学院,辽宁 沈阳 110136; 2.国网法库县供电公司 配电工区,辽宁 沈阳 110400;3.国网辽宁省电力有限公司计量中心 资产配送部,辽宁 沈阳 110168)
摘要:设计并实现了一种低功耗、高性能嵌入式微处理器和嵌入式逻辑系统相结合的遥控搬运机器人控制系统。在深入研究ARM处理器和嵌入式操作系统的基础上,提出了基于ARM的远程遥控搬运机器人系统的方案。通过多次对遥控搬运机器人进行实验调试,最后得出该项目所研究的遥控搬运机器人控制系统具有可行性和稳定性的结论。
关键词:ARM;搬运机器人;远程遥控;机械手臂;重力感应
21世纪科学技术迅速发展,智能机器人技术的应用也越来越广泛,在太空探测、海洋开发、救灾防爆、家庭服务、教育教学、军事等领域日益发挥着重要的作用,渐渐成为国内外研究学者关注的焦点。由于传统机器人使用按钮和摇杆开关操作存在遥控精度低和速度慢的弊端,特设计了一种应用3D式机械手臂、闭环控制系统等相结合、具有良好可扩展性、模块化的遥控搬运机器人控制系统。
1系统整体设计方案
遥控搬运机器人控制系统主要由2大部分组成:无线多功能遥控器和搬运机器人机身,如图1所示。多功能遥控器主要分为重力感应部分、无线通信部分和细调波轮控制部分等。搬运机器人机身分为机械手臂、编码器、电机驱动等部分。设计方案的创新之处在于该搬运机器人以ARM微处理器为核心,将重力感应、无线通信、MPU6050加速度、陀螺仪传感器、光耦编码器和中断功能、3D智能机械手臂、人工智能和自动控制等技术集于一体,从而为人们提供更多可行的服务。
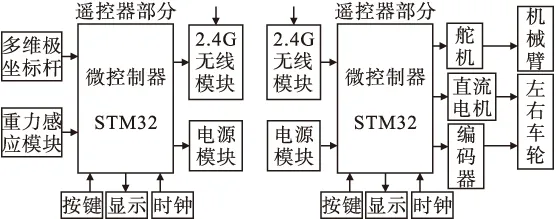
图1 系统整体结构
2无线多功能遥控器设计
2.1硬件模块分析
2.1.1重力感应控制模块
通过遥控器的重力感应模块获得遥控器的倾斜角,通过重力加速度的分量感应重力倾角,通过编码到无线模块进行搬运机器人的无线传输,通过解码得到车速控制值,经过单片机芯片内部自带的PWM脉宽调制模块控制电机的电压从而控制车速,还可以做成通过车速编码器进行闭环的车速控制。使用重力感应的方式比较适合车辆远程的快速行驶。
2.1.2细调波轮控制模块
车体位置的控制采用闭环的控制方式,包括编码器识别车体位置和遥控器编码器用于设置车轮转角和方向。细调模式有利于搬运机器人在复杂环境中的遥控操作,细调波轮充分利用了人们的直觉遥控方式。在使用细调波轮通过障碍物或者接近搬运物体时,为了达到一个较为好的位置,所用时间大概缩短至1/3左右。使用细调波轮的方式适合在复杂地形中行走或者在接近搬运物体时寻找车体停止的最佳位置。
2.1.3无线通信模块
设计采用2.4 G的无线通信模块,使用的是高速的SPI接口,具有通信距离远、通信速率高、占用IO资源较少的优点。内部自带CRC校验,自动应答功能,数据传输可靠性高。NRF24L01 是NORDIC 公司最近生产的一款无线通信芯片,采用FSK 调制,内部集成NORDIC 自己的Enhanced Short Burst 协议,具有全球开放的 ISM 频段,免许可证使用,拥有125个可选的频道,可以满足多点通信和调用需要,实现点对点或是1对6的无线通信,无线通信速度可以达到2 Mbps。NORDIC 公司提供通信模块的GERBER 文件,可以直接加工生产。嵌入式工程师或是单片机爱好者只需要为单片机系统预留5 个GPIO,1 个中断输入引脚,就可以很容易实现无线通信的功能,非常适合用来为MCU系统构建无线通信功能。
2.2软件工作流程设计
无线多功能遥控器使用的控制芯片和搬运机器人的相同,同样先经过初始化的设置程序,对系统的时钟和工作的基本寄存器进行设置,在初始化程序中除了所使用的I/O端口根据要求进行配置以外,还要进行液晶屏幕的初始化和重力感应芯片的设置。系统使用了1个指示灯的闪烁作为系统正常运行的标志。同样使用了4个遥控状态命令指示灯,包括机械手臂使能指示灯、重力感应模式切换指示灯。然后,系统会转入到重力感应的信号测量中,通过计算将重力感应的值转换成标准形式,这样可以方便数据发送和显示。液晶显示屏幕将单片机内部参数显示出来方便监控系统状态和进行系统的调试工作。按键的使用是为了状态监控,按键作为系统的输入可以将输入转换成二进制,编码到1个字节当中,经过将4个按键的状态信息装载到1个字节当中去就可以方便发送。图2所示为多功能遥控器的工作流程。
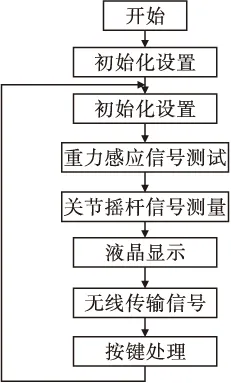
图2 遥控器软件工程流程
3搬运机器人机身系统设计
3.1硬件模块分析
3.1.13D式机械手臂设计模块
智能机械手臂主要是对舵机进行控制,而舵机本身是一个闭环的控制系统,对于机械手臂的许多操作都有很大优势。搬运机器人的机械手臂控制采用极坐标的方式,每个关节的角度由舵机自动控制,舵机的通信采用脉宽调制控制定位转角。机械手臂的控制使用了关节摇杆的技术方便了工人抓取货物和放下货物,为了保证使用时的灵活性,特选用了六轴的机械手臂,其中一个轴用于控制手抓。整体架构使用铝合金材料,质量较轻,强度较高,比较节能。
智能机械手臂的遥控信号采集是通过遥控器上的关节摇杆来完成的,关节摇杆由5个电位器组成。每个电位器的电压值对应相应的角度位置信号,经过AD转换为二进制数,角度变成了二进制的参数,经过无线远程传送给搬运机器人,搬运机器人将二进制编码的角度信号变成PWM调制信号给舵机通信,舵机根据PWM信号进行自动的角度定位。为了改进接收信号的质量,该系统采用信道编码的方法来改善信道质量,过程发送端会对数据进行组帧、并串转换、卷积编码等处理后,将所得数据发送至无线通信电台进行进一步调制。接收端的无线通信电台将对信号进行解调后把数据发送到接收端的FPGA。接收端的 FPGA 检测到帧同步信息后将数据保存,并进行译码。当遥控器开启机械手臂的状态下,机械手臂和关节摇杆通过同步控制算法进行同步定位,使用精密的数字舵机确保系统的准确性和快速性。机械手臂系统原理如图3和图4所示。
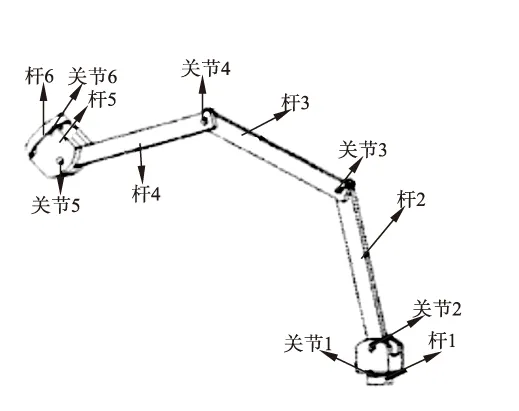
图3 三杆系统连杆关节原理
3.1.2机身驱动模块
机身的控制系统采用闭环控制方式,主要以电机驱动模块作为执行器和霍尔编码器作为系统的偏差反馈器件,使用单片机的控制算法进行自动控制。L298N步进电机驱动模块可以同时驱动两个独立控制的直流电机进行正反转的控制和脉宽调制的方式进行变速。模块使用了光耦方式进行电气隔离,在单片机侧使用了三极管进行电压变换的隔离。车轮转动带动编码器转动产生正交的A相信号和B相信号,控制器将控制信号处理识别电机的正反转、车轮速度和车轮转过的路程。搬运机器人的编码器采用的是开关量输出的霍尔编码器,使用圆形的磁体作为磁性的码盘,码盘一周可以产生5个脉冲信号,所以车轮每转动一周产生几百个均匀的脉冲信号,使用这些的脉冲信号既可以作为车速来使用,也可以用来作为转角和转矩来使用。

图4 三杆系统连杆坐标系
3.2软件工作流程
搬运机器人的软件流程如图5所示。由图可以看出,系统有一个电池过放电的保护,因为使用的是7.2 V的可充电电池,所以系统软件设计的时候为了增加电池使用寿命,进行了电池过放电的保护。当系统检查到电池电压过低时,将进行机器人系统的制动操作,保护电池。当遥控器的命令工作在位置细调工作状态时,系统使用编码器的闭环控制算法,完成位置的细调,方便将搬运机器人停在一个最佳位置搬运货物。当遥控器的命令工作在快速前进的状态时,搬运机器人的车体根据遥控器的重力感应信号快速地移动,使用重力感应的遥控方式更加有效利用人们的直觉去控制车体。机械手臂使用舵机去控制每个关节的角度,角度信号由遥控器的关节摇杆发出,舵机接受使用PWM编码的角度信号,高精度的数字舵机将自动确定关节停留的角度。初始化程序除了设置系统时钟和一些工作的基本寄存器以外,还会将控制舵机的定时器设置为输出PWM的形式,对捕捉编码器使用外部中断的设置,对于电池电量采集的模数转换器的设置,无线模块的频道信号通道数据和地址格式的初始化设置和所有使用的I/O端口的配置都会在初始化程序中得到体现。
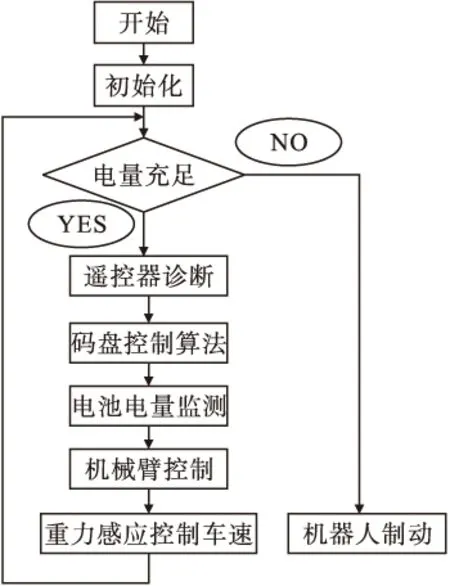
图5 机器人机身软件工作流程
4结语
遥控搬运机器人经过改进车辆控制方法和机械手臂的控制方法,使控制的精度得到较大程度的提高,同时简化操作提高了工作效率,使用了32位高性能控制器和无触点遥控结构提高了控制系统的可靠性。关节结构杆的使用在解决了直杆的遥控精度低速度慢的问题;引进光耦正交编码滑轮作为车体位置的细调,能够让工作者快速调整车体位置,在最佳位置安置目标物体。经多次测量,遥控搬运机器人的工作情况良好。
在深入研究ARM处理器和嵌入式操作系统的基础上,设计出基于FPGA系统的遥控搬运机械人遥控系统。该机器人可以应用于未知探测、家庭服务、灾区救援等多领域,定位准确,进一步开发后可以在更多特殊环境完成各种任务,而随着我国机器人智能科技技术的进一步发展,遥控搬运机器人将应用到更多领域。
参考文献
[1]刘军.例说STM32[M].北京:北京航空航天大学出版社,2011.
[2]兰虎.工业机器人技术及应用[M].北京: 机械工业出版社,2014.
[3]喻金钱.STM32F系列ARM Cortex-M3核微控制器开发与应用[M].北京:清华大学出版社,2011.
[4]肖广兵.ARM嵌入式开发实例:基于STM32的系统设计[M].北京:电子工业出版社, 2013 .
[5]南楠,赵立新.基于FPGA的DDS信号源研究与设计[J].沈阳工程学院学报:自然科学版,2016,12(1):74-82.
[6]胡汉才.单片机原理与应用[M].北京:清华大学出版社, 2010.
[7]赵明岩.竞赛机器人本体制作教程[M].杭州:浙江大学出版社, 2013.
[8]张玉茹,易际明.机器人灵巧手:建模、规划与仿真[M].北京:机械工业出版社, 2007.
[9]刘洪正.输电线路巡检机器人[M].北京: 中国电力出版社, 2013.
[10]刘极峰,易际明.机器人技术基础[M].北京:高等教育出版社,2006.
[11]臧海波,易际明.仿生机器人制作入门[M].北京:人民邮电出版社,2012.
[12]武奇生.基于ARM的单片机应用及实践:STM32案例式教学[M].北京:机械工业出版社,2014.
[13]Dalal N,Triggs B.Histogram of Oriented Gradients for Human Detection[J].Proceedings of IEEE International Conference on Computer Vision Pattern Recognition I,2015: 886-893.
[14]Lionnie R,Timotius I K,Setyawan I.An analysis of Edge Detection as Feature Extractor in a Hand Gesture Recognition System Based on Nearest Neighbor[J].International Conference of Electrical Engineering and Informatics,2011:1526-1531.
[15]Andriluka M,Roth S,Schiele B.Pictorial Structures Revisited: People Detection and Articulated Pose Estimation[J].IEEE Conference on Computer Vision and Pattern Recognition,2009:1014-1021.
(责任编辑佟金锴校对张凯)
Research and design of handling robot remote control system based on ARM
WANG Bin1,LI Chen2,TAO Chen-jian1,WANG He-yan3,GAO Qing-zhong1
(1.Shenyang Institute of Engineering,School of Automation,Shenyang 110136,China; 2.China Faku County power company,distribution area,Shenyang 110400,China; 3.China Network Limited company of Liaoning province power metering center,assets Distribution Department,Shenyang 110168,China)
Abstract:In this paper,a kind of low power consumptionremote robot control system was designed and realized that combined the high performance embedded microcontroller processor with the embedded logic system.On the basis of the further study on ARM processor and embedded operating system,the remote handling robot remote control scheme was proposed based on the FPGA system.Many experiments of remote handling robot debugging showed that the handling robot remote control system had the feasibility and stability.
Key words:ARM;handling robot;wireless remote control;mechanical arm;gravity sensor
中图分类号:TP39
文献标识码:A
文章编号:1673-1603(2016)02-0143-05
DOI:10.13888/j.cnki.jsie(ns).2016.02.011
作者简介:王斌(1995-),男,辽宁丹东人。通讯作者: 高庆忠(1979-),男,辽宁鞍山人,讲师,博士研究生。
收稿日期:2015-09-06