LCD玻璃切割机伺服驱动机构的设计算法
2016-06-06 03:48:36李海泉王涛
电子工业专用设备 2016年5期
关键词:精度
李海泉,王涛
(中国电子科技集团公司第二研究所,山西太原030024)
LCD玻璃切割机伺服驱动机构的设计算法
李海泉,王涛
(中国电子科技集团公司第二研究所,山西太原030024)
摘要:阐述了LCD玻璃切割机中伺服驱动机构对加工精度的重要性,并针对y向进给运动给出了一种伺服驱动机构的设计算法,对以后类似伺服驱动机构的设计计算具有积极的指导作用。
关键词:LCD玻璃切割机;精度;伺服驱动;设计算法
LCD玻璃切割机是液晶显示器生产过程中的关键设备,其主要功能是对尚未灌晶的大块玻璃进行上料固定、视觉识别和划线切割等,使之成为最终产品显示面板大小的单体液晶玻璃[1,2]。LCD玻璃切割机主要由切割工作平台的y向运动机构、刀座组件的x向运动机构、切割刀头的z向运动机构等组成,采用工控机控制机、电、气的动作,完成液晶玻璃的精确切割。设备结构如图1所示。

图1 LCD玻璃切割机
随着液晶产品逐渐向大尺寸、薄型化、曲线窄边框的方向发展,技术难度越来越大,切割设备不断更新换代,对切割精度的要求也越来越高;产品的切割精度及良品率成为玻璃切割设备的核心竞争指标。LCD玻璃切割机的加工精度主要由运动系统加以视觉识别定位控制,而运动系统主要采用伺服电机、滚珠丝杠、直线导轨驱动。因此,对各级伺服驱动机构进行设计计算非常有必要。
本文以LCD玻璃切割机工作平台的y向进给运动为例,进行伺服驱动机构的设计计算。工作平台的y向进给运动采用伺服电机驱动滚珠丝杠和直线导轨,运动方式为水平。根据客户的工艺要求设计机构,运动精度为±0.01 mm,最大速度为0.5 m/s,y向进给运动系统负载质量为350 kg,由机构的行程可知滚珠丝杠的长度为1 451 mm。LCD玻璃切割机工作平台的y向伺服驱动机构,主要包括伺服电机、联轴器、滚珠丝杠副和直线导轨,结构如图2所示。伺服驱动机构各部件选用的合适与否直接关系到其运动性能和定位精度,因此对各部件进行准确的设计计算是设计整套伺服驱动机构的关键。
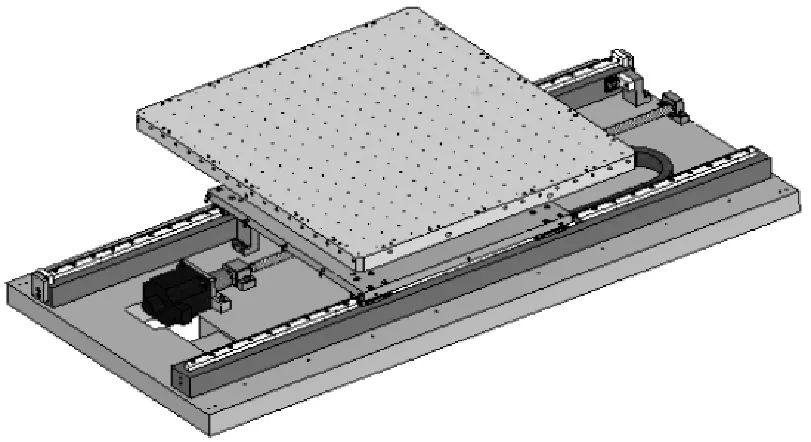
图2 工作平台的y向伺服驱动机构
1 滚珠丝杠的选型设计
滚珠丝杠的选型主要是确定精度、类型和支撑方式,计算直径、导程、行程长度,验算转速、负荷和刚性,并据此选择合适的丝杠以及配套的螺母、固定座和支撑座。
1.1丝杠精度的确定
根据运动精度选择C5级的THK精密滚珠丝杠,导程精度:300 mm±0.023 mm,轴向间隙为GT。配合视觉系统的识别定位,执行运动补偿,使重复定位精度达到±0.01 mm。
1.2丝杠轴支撑方式的确定
丝杠的行程为1 200 mm,运动速度为0.5 m/s,属于高速使用,可以选择固定-支撑或固定-固定的方式。但由于固定-固定的方式结构比较复杂,且部件精度和组装精度要求较高,因此,选用固定-支撑的方式。
1.3丝杠导程的确定
电机与丝杠通过联轴器连接,机构的运动速度为0.5 m/s,考虑到负载的转动惯量比较大,选用中惯量的伺服电机,其额定转速为2000 r/min,计算导程:

因此,要想实现机构的运动速度,应选PB≥15 mm,选择导程为20 mm。
1.4丝杠直径的计算
查阅THK选型手册,THK精密滚珠丝杠轴径与导程的标准组合,如表1所示。

表1 THK精密滚珠丝杠轴径与导程的标准组合
一般而言,滚珠丝杠副的长径比在60以下是安全范围,过长会产生丝杠因自重下垂,挠度过大,运行时产生振颤现象。

式中,l为丝杠的长度
dB为丝杠的轴径
预选丝杠轴径为25 mm、32 mm或36 mm。
1.5容许转速的计算
最高转速:

由丝杠轴的轴径决定的危险速度:
由DN值决定的容许转速:
式中,v为丝杠的最大工作转速
λ2为固定—支撑安装方式的相关系数
d1为丝杠轴沟槽谷径,也叫螺纹小径
lb为安装间距,根据丝杠长度1 451 mm推算
D为丝杠副钢球中心直径
根据不同轴径计算相应的转速,结果如表2。
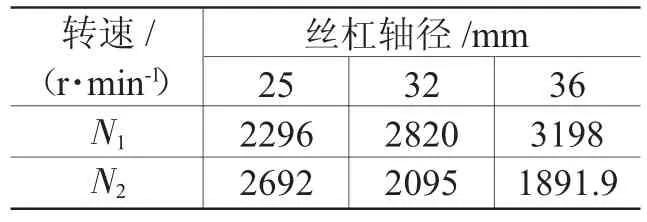
表2 THK精密滚珠丝杠转速与轴径的计算
根据最高转速不能超过丝杠轴的危险速度及DN值容许转速,且丝杠轴的危险速度不能超过DN值容许转速的条件,综合考虑,选择丝红轴的外径为25 mm。
1.6容许轴向负荷的计算
运转模式,如图3:
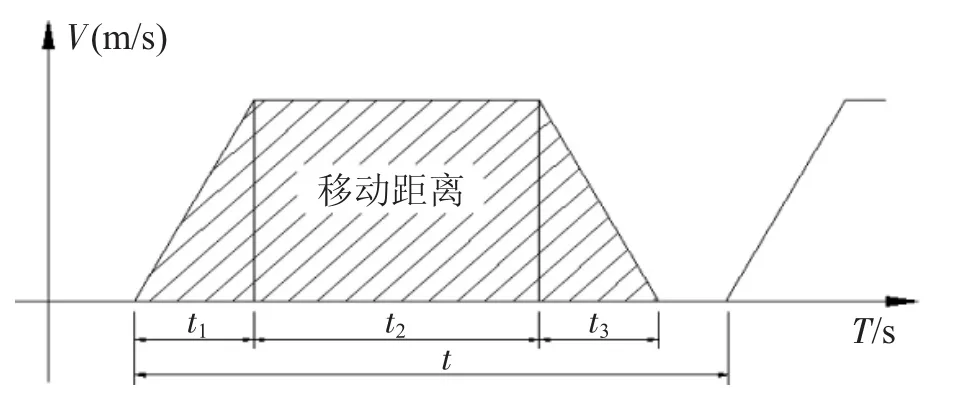
图3 滚珠丝杠的速度分布图
加速时间:t1=0.2 s
匀速时间:t2=0.8 s
减速时间:t3=0.2 s
运转周期:t=2 s
最大轴向负荷的计算:

最大轴向负荷:

式中,μ为导轨摩擦系数
m为负载的质量
丝杠轴的挫曲载荷的计算:

式中,η2为与安装方式相关的系数
丝杠轴的容许拉伸压缩负荷:

由上可知,丝杠轴的最大轴向载荷小于其挫曲载荷和容许拉伸压缩负荷,使用安全可靠。
1.7螺母的选择
根据丝杠外径25 mm和导程20 mm,查阅THK造型手册,选择无预压螺母BNK2520-3.6 ZZ。
验算螺母的容许轴向负荷:

式中,C0a为基本静额定载荷
fs为静态安全系数
由F3>Fa可知,选用螺母安全。
1.8丝杠型号的确定
综合以上计算,选择THK高精度滚珠丝杠,型号:BNK2520-3.6GT+1451LC5YM 1.9丝杠刚性的校核
查阅THK选型手册,所选丝杠的轴向刚性K 为360 N/μm,计算由丝杠轴向刚性引起的定位误差δ。
δ=Fa/K=885.3/360=2.46 μm<±0.01 mm
由丝杠轴向间隙引起的定位误差,对丝杠定位精度的影响较小,可忽略不计。
2.0固定座和支撑座的选用
固定座选用EK20,支撑座选用EF20。
2 伺服电机的选型设计
伺服电机的选型主要是根据机构、运转模式计算负载的最大转动惯量、转矩及所需的功率、转速等;并校验负载的有效转矩要小于电机的额定转矩、负载的最大加速转矩要小于电机的瞬时最大转矩、负载的加速功率要小于电机的额定功率、负载的最大转速要小于电机的额定转速、折算到电机轴上的负载总惯量要小于电机允许的安全惯量,根据以上条件选择合适的伺服电机。
2.1滚珠丝杠的质量

式中,ρ为丝杠的材质密度
2.2负载转动惯量
直线运动部件的惯量:

滚珠丝杠的惯量:

联轴器的惯量:

折算到电机轴上的负载转动惯量:

2.3电机旋转速度

2.4负载转矩

式中,f为摩擦系数,
η为机械效率
2.5负载加速功率

2.6确定电机
综合以上计算,预选松下MDME AC200V A5系列1 kW中惯量电机,额定转速为2 000 r/min,额定转矩为4.77 N·m,电机瞬时最大转矩为14.3 N·m,额定惯量为4.6×10-4kg·m2。校验如下:
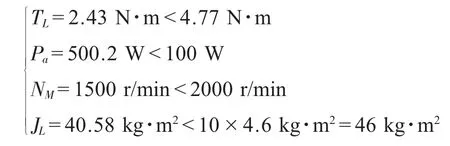
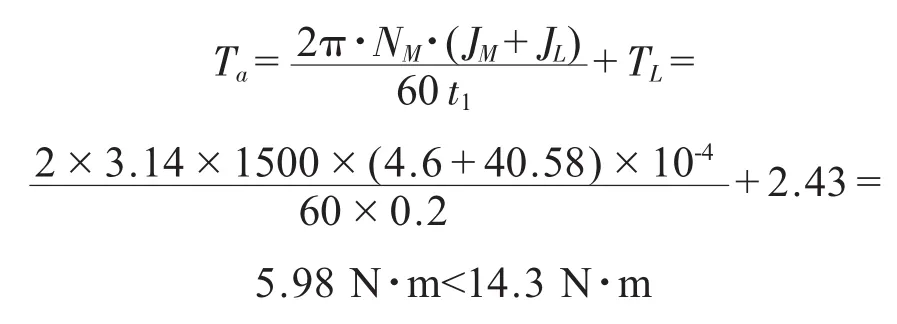
最后确认加速转矩:
确认所选电机安全可靠。
3 导轨的选型
导轨的选择主要考虑精度和类型,根据机构确定轨长,根据负载及安装条件确定轨宽,最后验算其工作寿命。LCD玻璃切割机的y向进给伺服驱动机构选择球保持器型LM滚动导轨,这种导轨由于钢球间无相互摩擦,具有磨损小、油脂保持性好、噪音低、使用寿命长的优点。
每个滑块上的负载:

选用导轨:SHS25C-1780LH
计算导轨寿命:
式中,
C——导轨的基本动额定载荷
ls——导轨的行程长度
4 联轴器的选择
联轴器选择主要考虑允许转矩、转速、对中性等要求,另外联轴器还应具有过载安全保护以及一定的缓冲减震性能。LCD玻璃切割机的y向进给伺服驱动机构选用高强度强力铝合金材质的双板簧式联轴器,扭转刚性较好,外形尺寸紧凑,旋转惯量小。而且,外围和端面平整,高速旋转时风切声较小,可低噪音高速旋转。
根据联轴器的允许转速、转矩和安装精度选用三木挠性联轴器SFC-050DA2-15B-22B。
5 结 论
本文以LCD玻璃切割机工作平台的y向进给运动机构为例,给出了一种伺服驱动机构的设计计算方法。在实践使用中,LCD玻璃切割机的驱动机构运行性能稳定,体现了设计计算的可靠性。此设计算法对相关伺服驱动机构的设计具有一定的参考意义,有利于提高设计的合理性。
参考文献:
[1]陈艳,张建华.液晶显示器生产中的切割工艺与设备分析[J].电子工艺技术,2002,23(5):208-210.
[2]蔡克新,曹力宁. LCD玻璃划切机控制系统设计[J].电子工艺技术,2013,34(3):170-173.
[3]吕沫,张飞特,王建花. TP玻璃切割工艺研究[J].电子工艺技术,2014,35(4):242-245.
[4]张新华. LCD玻璃划切机切割工艺提升[J].山西电子技术,2015,180(3):162-163.
[5]成大先.机械设计手册[M].北京:化学工业出版社,2004.
A Design Algorithm about Servo Drive System of LCD Glass Incising Machine
LI Haiquan,WANG Tao
(The 2ndResearch Institute of CETC,Taiyuan 030024,China)
Abstract:The paper presents the importance of servo drive system of the LCD glass incising machine in machining accuracy. In particular, A design algorithm about servo drive system was put forward in Y-feed direction, which provides active guidance for the design and calculation of similar servo drive system.
Keywords:LCD glass incising machine;Accuracy;Servo drive;Design algorithm
中图分类号:TN605
文献标识码:B
文章编号:1004-4507(2016)05-0020-05
收稿日期:2016-03-31
猜你喜欢
一重技术(2021年5期)2022-01-18 05:42:12
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:06
中学生数理化·八年级物理人教版(2019年12期)2019-05-21 07:26:38
电子制作(2018年11期)2018-08-04 03:25:38
水利规划与设计(2018年1期)2018-01-31 01:54:00
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:06:44
测绘科学与工程(2016年5期)2016-04-17 06:51:15
制造技术与机床(2015年10期)2015-04-09 07:05:46
深圳大学学报(理工版)(2015年5期)2015-02-28 16:21:54
电子设计工程(2015年3期)2015-02-27 12:03:45