
多变量模糊系统建模及控制理论分析
2016-06-04 13:06周高强路潇瀚任国军
中小企业管理与科技·中旬刊 2016年5期
关键词:分析
周高强+路潇瀚+任国军
摘 要:本文对多变量模糊系统建模及控制理论进行了分析,对其中存在的问题作了探讨和阐述。同时也对其研究的新进展做了简要的介绍,其中包含有目前最新颖的多变量模糊系统的建模和分辨,以及两种多变量模糊系统建模与控制的新型控制器。最后对其发展的前景和趋势作了简要的分析和阐述。
关键词:多变量;模糊系统建模;控制理论;分析
中图分类号: TP1 文献标识码: A 文章编号: 1673-1069(2016)14-171-2
0 引言
在现实世界中有庞大的多变量模糊系统存在,这个系统其参数以及结构都具有多变性。尽管目前的多变量模糊系统的建模以及控制理论已经有了很大的提升和完善,但还是存在一些问题和缺陷,因为目前的多变量模糊系统建模与控制的方法缺乏有效性和简便性,且在计算的过程中缺乏高效简捷的方法,因而使得大部分的多变量模糊系统模型缺乏实际效用,且只能应用于变量单一的系统中。尽管后来有人也研究出了一些比较简易的模型和快捷的计算方法,但是这也使得其准确性大大降低,另外现有的模型还不能直接分析其动态的特性。因此研究和分析多变量模糊系统的建模与控制理论,为建立适用的模型提供更好的理论基础和依据就变得尤为重要。
1 多变量模糊系统中存在的问题
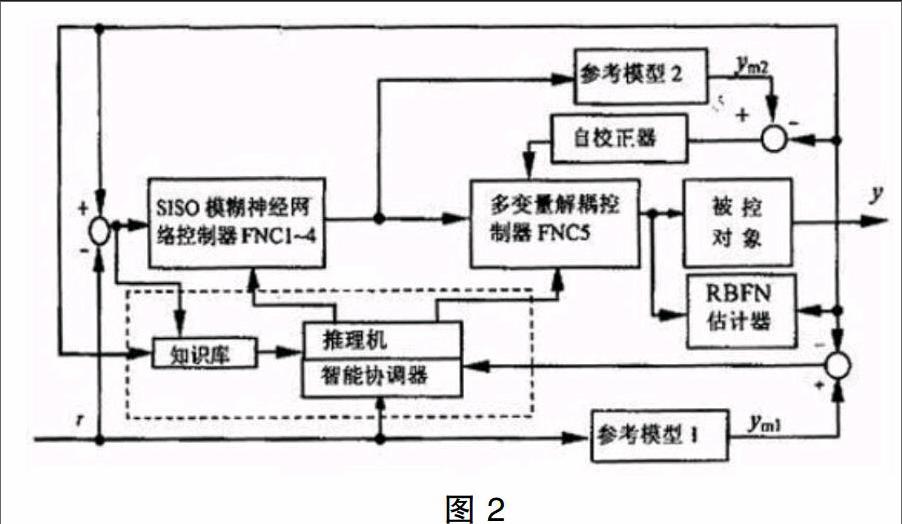
目前的多变量模糊系统的建模与控制仍然处于初级的发展阶段,这时已经形成了较为标准的模糊控制结构,也有一定的控制规则,但还存在一些难以克服的问题和缺陷。首先是目前系统控制的规则主要还是以理论以及操作经验为主,但是在其完善和拓展上还存在较大的困难。其次就是这时所依赖的控制器尽管是在多变量模糊系统建模以及控制理论的基础上研发出来的,但是其对于模糊系统中的各个维数的关系以及指数的增长趋势都不能进行实际意义上的控制,因此也缺乏实际意义。然后就是控制器的组成结构以及运算方式都非常复杂,很难满足实际应用的智能体系。最后就是系统的分析存在较大的难度。而目前所使用的模糊系统的建模与控制的理论大都只适合于单一的系统,因此为了更好满足工程实践以及多变量模糊系统发展的要求,就必须对其建模与控制理论进行研究和分析,从而促进多变量模糊系统的功能完善以及进一步的发展。常规模糊控制器结构如图1所示。
2 多变量模糊系统中的新颖模型
2.1 穴映射模型
为了有效的弥补目前多变量模糊系统模型的不足,专家们在应用变量论域以及模糊系统分散化的前提条件下,提出了穴映射的相关概念,即模糊穴以及穴空间,同时还建立了两种表示穴映射内部关系的模型,即推理模型和矩阵模型,另外还给出了辨识的方法以及计算的方法。当描述系统的穴映射内部的关系时,可以用矩阵R来进行表达,这样就可以获得一个矩阵的模型。这个模型的优点就是不管系统中的变量多与否,其都能应用上述的模型来进行描述和表示,即可以用一个二维的矩阵或者是并行的穴映射的矢量来进行表示,这就使得多变量模糊系统建模趋向简易化,也为防止维数爆炸提供了重要的解决途径。
2.2 动态方程模型
目前的多变量模糊系统在建模的过程中大部分只考虑了系统的外部因素,因此可以说这种多变量模糊系统的模型只是一种函数模拟器,因此很难获得其内部的动态数据用以设计控制器。而为了分析多变量模糊系统的复杂性,并对其进行有效的控制,专家们建立了一种新颖的动态方程模型,用来反映系统的各类响应,并达到获取内部控制数据的目的。这种动态的模型是依靠观测的状态来设置一个局部反应系统,用以反映内部的行为,并运用特征矢量建立相应的矢量关系,从而达到与外部行为相互呼应的效果。这种模型能够极大的简化分析的过程和环节,但是其计算出的结果却比较保守。
2.3 神经网络模型
在多变量模糊系统建模的方法中,其主要是依靠理论知识和操作经验来加以完成。但是如果理论知识不充分或者是多变量的系统太过复杂,就会导致其结构很难被辨识出来,因此为了有效的解决这一问题,专家们就研究出了一种新型的神经网络模型,从而为多变量模糊系统建模提供了一种新途径。这种神经网络模型的活跃度比较高,并且能够与模糊逻辑有效的综合起来,并为以模糊逻辑为发展基础的智能模糊系统打下了良好的理论基础。
2.4 递阶结构模型
对于多变量模糊系统来说,建模必须按照一定的层次结构来进行,因此在建模的过程中必须遵从一定的递阶结构。而递阶结构模型的出现,有效的保证了模型的完整的层次结构,并且其辨识方法也更为先进。这种模型辨识的方法就是运用递阶控制的均衡联系法来进行辨识,从而有效的促进了各个子系统之间能够达到良好的平衡状态。
3 多变量模糊系统控制理论
3.1 直接控制
在多变量模糊系统的控制理论中,首先就是直接控制。这种控制理论不需要了解和分析控制对象的的特点以及特性,同时对于促进产业化的提升具有重要的作用和意义。但是其也存在一定的缺陷,即设计出的控制器不能尽快满足控制对象的需求和特性,同时其还要考虑到变量系统的敏感性和耦合性。因此在运用的过程中,首先要学习优化计算和结构理论,以及学会推理运算的基础方式和理论。
3.2 间接控制
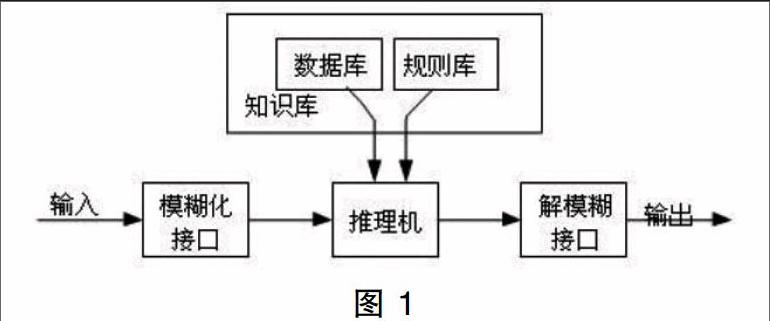
多变量模糊系统的间接控制中,先要为控制的对象进行建模,建模的依据就是模糊逻辑体系,然后在此基础上设计出一个符合理想标准的控制器。这种间接控制器能够为多变量模糊系统建模提供更合理的信息,其次就是能够对系统进行深入的分析,同时还能使控制理论得到进一步的完善和提升。但是其也存在一些不足,即存在不确定性,并且也缺乏一定的有效性。间接控制的方法如图2所示。
4 总结
综上所述,尽管目前人们对于多变量模糊系统的建模以及控制理论有了进一步的分析和认识,但是还没有达到完善优化的目的,因此未来研究任务还非常艰巨。因此未来多变量模糊系统建模与控制的研究方向为:加大对多变量模糊系统建模的深入分析;设计一套完整的适应多变量模糊系统发展的控制理论。只有不断进行研究和分析,才能保证多变量模糊系统建模与控制的过程能够得到有效的发展和提升。
参 考 文 献
[1] 罗运辉.非线性多变量热工过程多模型控制及其应用研究[D].山东大学,2011.
[2] 任耀庆.多变量模糊逻辑控制系统的设计及其应用[D].中南大学,2013.
[3] 任贵杰.单元机组协调控制系统的建模与控制优化研究[D].北京交通大学,2011.
[4] 赵曌.基于PLS方法的建模以及控制器设计[D].浙江大学,2012.
[5] 张碧琰.多变量非线性系统的逆方法解耦控制研究[D].东北大学,2010.
猜你喜欢
现代畜牧科技(2021年9期)2021-10-13
民用飞机设计与研究(2020年4期)2021-01-21
电子制作(2018年18期)2018-11-14
山东工业技术(2016年15期)2016-12-01
当代经济研究(2016年5期)2016-12-01
现代农业(2016年5期)2016-02-28
出版与印刷(2016年3期)2016-02-02
财经界(学术版)(2015年20期)2015-12-23
中国中医药现代远程教育(2014年11期)2014-08-08
华北水利水电大学学报(社会科学版)(2014年3期)2014-04-16
