大型桩定位抓斗挖泥船作业过程载荷分析
2016-06-03 03:11:38陈新权冯永军丁金鸿戴一平
中国海洋平台 2016年2期
万 浩, 陈新权, 杨 启, 冯永军, 丁金鸿, 戴一平
(1.上海交通大学 海洋工程国家重点实验室,上海 200240;2.劳氏船级社(中国)有限公司舟山分公司, 浙江 舟山 316021)
大型桩定位抓斗挖泥船作业过程载荷分析
万浩1, 陈新权1, 杨启1, 冯永军1, 丁金鸿1, 戴一平2
(1.上海交通大学 海洋工程国家重点实验室,上海 200240;2.劳氏船级社(中国)有限公司舟山分公司, 浙江 舟山 316021)
摘要:该文针对桩定位抓斗挖泥船作业过程中的水动力性能进行了研究,建立了带驳船抓斗挖泥船的水动力模型,计算了不同作业状态下的船体载荷和三定位桩的受力,并分析了三定位桩受力随抓斗运动和不同环境载荷变化的趋势,为定位桩设计提供了依据。
关键词:抓斗挖泥船;定位桩;载荷分析;水动力
0引言
抓斗挖泥船是一种应用较为广泛的挖泥船,主要用于港池、码头、堤案等处的挖泥作业。大型抓斗挖泥船采用定位桩进行船舶定位,挖泥船在作业过程中受到环境载荷及作业载荷的作用,并最终转移到定位桩上[1]。在作业过程中,大型抓斗的挖泥与旋转产生的载荷会对船舶产生较大的影响,进而影响到定位桩上载荷的分配,是定位桩设计与安全作业的重要因素。
从现有的资料来看,有少数学者[2-4]针对其他类型的挖泥船的定位桩受力特点进行了计算,但目前尚未有针对大型抓斗挖泥船受力特点的定位桩受力计算模型。
该文针对一200 m3大型抓斗挖泥船,建立了水动力模型,考虑抓斗挖泥和旋转作业的工况,计算了不同环境载荷入射角、波浪周期和波高下的船体载荷,对三定位桩的受力进行了研究,总结了定位桩受力随不同参数的变化规律,为船舶的安全作业和定位桩设计提供了依据。
1计算模型
该船配有三根定位桩,其中尾桩一根,首桩两根,作业水深30 m。以重心在水面上的投影为坐标原点,X轴以向船艏为正方向,Y轴以向左舷为正方向,Z轴以向上为正方向。船舶主尺度见表1,总布置图和水动力模型分别如图1、图2所示。

表1 船舶主尺度

图1 200 m3抓斗挖泥船总布置图

图2 200 m3抓斗挖泥船作业状态水动力模型
2船舶所受外载荷计算
2.1波浪载荷
该文中波浪载荷的计算基于三维势流理论,三维势流理论假设流体为理想流体,速度势存在且满足四类边界条件(自由面条件、海底条件、湿表面条件和无穷远边界条件)和拉普拉斯方程。同时假设波浪船体运动均为微幅,则速度势可用叠加原理分解为入射势、辐射势和绕射势。通过物体湿表面分布源汇的格林函数法得到物面辐射速度势和绕射速度势的积分方程。
求得速度势后,按Bernoulli公式计算物体湿表面上的压力,将压力沿湿表面进行积分得到船体所受流体作用力,从而求解船体运动方程。
船体的运动方程为:
(1)


图3 200 m3抓斗挖泥船纵向波浪力时历曲线 图4 200 m3抓斗挖泥船横向波浪力时历曲线
2.2风、流载荷
风载荷和流载荷根据石油公司国际海事论坛(OCIMF)提出的计算公式进行计算[5],载荷系数也根据该文件查得。具体计算公式见式(2)、式(3)。
(2)
式中:FXW、FYW分别为X、Y方向风载荷;MXYW为风载荷转矩;CXW、CYW和CXYW为相应系数;ρW为空气密度;LBP为船舶垂线间长;AT、AL分别为横截受风面积和舷侧受风面积;VW为风速。
(3)
式中:FXC、FYC分别为X、Y方向流载荷;MXYC为流载荷转矩;CXC、CYC和CXYC为相应系数;ρC为水流密度;T为平均吃水;VC为流速。
2.3作业和抬船载荷
在抓斗挖泥船作业过程中,抓斗的旋转会对船舶载荷产生很大的影响,主要影响船舶所受到的垂向力、横摇力矩和纵摇力矩。船舶所受到的作业载荷按式(4)计算:
(4)
式中:FZZ、MXZ、MYZ分别为船舶受到的作业载荷引起的垂向力、横摇力矩、纵摇力矩;GZ为抓斗吊重;l为抓斗臂长度;lzg为抓斗至船舶重心距离;γ为抓斗右旋时抓斗臂与船舶中线夹角,若抓斗左旋则γ值为负数。
在恶劣环境条件下,抓斗挖泥船在作业过程中可将船体抬起一定的高度以减少波浪对船舶作业的影响,增大定位桩对地压力,提高作业稳定性。这会使船舶重力与浮力不相等且浮心位置发生变化,影响船舶所受到的垂向力和纵摇力矩。船舶受到的抬船载荷按式(5)计算:
(5)
式中:FZT、MYT分别为船舶受到的抬船载荷引起的垂向力和纵摇力矩;GT为抬船后桩腿承受的船舶重力;B为抬船后的浮力;lgb为重心与浮心之间的距离,若浮心比重心靠近船首则lgb为负数。
3定位桩受力计算
在船舶作业状态下,船体所受到的外载荷最终会由三根定位桩承受,因此必须对定位桩所受载荷进行详细地计算分析,为定位桩的设计提供参考。
在船体所受到的六个方向的力(矩)中,垂向力FZ,横摇力矩MX和纵摇力矩MY影响定位桩所受的垂向力,纵向力FX、横向力FY和艏摇力矩MZ影响定位桩所受的水平力即底部弯矩。
图5是船体受外载荷和桩腿力的受力示意图,图中对桩腿进行了编号,尾桩为1号桩,左侧首桩为2号桩,右侧首桩为3号桩。

图5 船体受外载荷和桩力示意图
假定船体与定位桩为刚体,对桩与船舶的作用力在六个方向上进行分解:
(1) 对于纵向力FX,假设三桩对船的作用相同,即有:
(6)
(2) 对于横向力FY,假设2、3号桩对船的作用力相同,有:
(7)
(3) 对于垂向力FZ,有:
(8)
(4) 对于横摇弯矩MX,假设船体横摇轴为船体中线,则有:
(9)
(5) 对于纵摇弯矩MY,假设2、3号桩受力相同,可用下式计算:
(10)
(6) 对于艏摇弯矩MZ,假设三桩对船体的作用力沿Y方向,且2、3号桩受力相同,则有:
(9)

各方程所求得的具体结果见表2,桩上各向所受载荷为每列之和。

表2 三桩对船作用力计算结果
4计算结果分析
4.1计算环境条件
对不同环境条件下的作业工况进行了分析,环境条件见表3。
4.2定位桩受力计算结果分析
抓斗挖泥船作业过程中,作业载荷随抓斗运动变化,抓斗作业各阶段的时间见表4。

表3 计算环境条件

表4 抓斗作业各阶段时间
在计算过程中假定抓斗右旋,将不同外载荷的时历曲线相加并按照表2中的计算方法计算得到三桩对船的作用力,即得到了三桩的受力。此处以波浪周期7 s,波高1.5 m,外载荷入射角180°桩受力结果为例分析三桩受力。
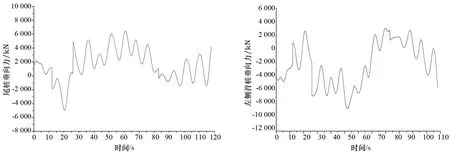
图6 1号桩垂向力时历曲线 图7 2号桩垂向力时历曲线
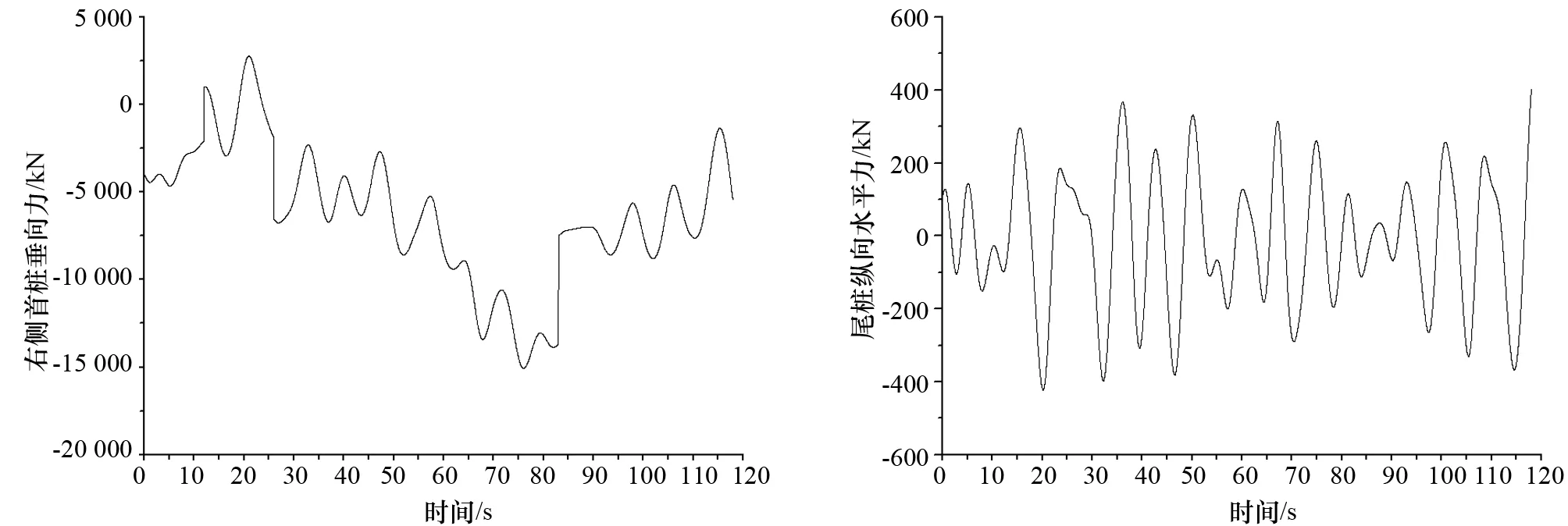
图8 3号桩垂向力时历曲线 图9 1号桩纵向水平力时历曲线

图10 1号桩横向水平力时历曲线 图11 2、3号桩纵向水平力时历曲线

图12 2、3号桩横向水平力时历曲线
通过分析三桩受力的时历曲线可以发现,三桩垂向力受抓斗作业影响很大。在抓斗下放和入水过程中,尾桩垂向力逐渐减小,首桩垂向力逐渐增大,并且在抓斗闭合过程中分别取得负向最大值和正向最大值即最大压力和最大拔桩力;在抓斗出水和提升过程中,三桩垂向力变化较为平稳,此时左侧首桩取得最大压力值;抓斗开始旋转时,右侧首桩垂向力逐渐减小即压力逐渐增大,并且在抓斗旋转完毕后取得最大压力值;卸料时三桩垂向力都会出现一个突变,受力绝对值都会减小;抓斗回旋过程中三桩垂向力变化趋势与旋转时相反。
三桩的水平力随时间变化较为平稳,其原因在于桩腿水平力只受环境载荷影响,与船舶作业过程无关。横向水平力和纵向水平力合成之后可得到桩腿所受的总水平力。波浪周期7 s,波高1.5 m环境条件下的三桩受力最大值见表5。

表5 不同环境条件下三桩受力最大值
从图13、图14中可以看出,尾桩受到的压力随环境载荷入射角增大逐渐增大,两首桩所受压力随环境载荷入射角增大逐渐减小;尾桩水平力随环境载荷入射角增大先增大后减小,在环境载荷入射角120°时取得最大值,两首桩水平力随环境载荷入射角增大逐渐减小。抬船后,三桩所受的压力均会增大,水平力均会减小。
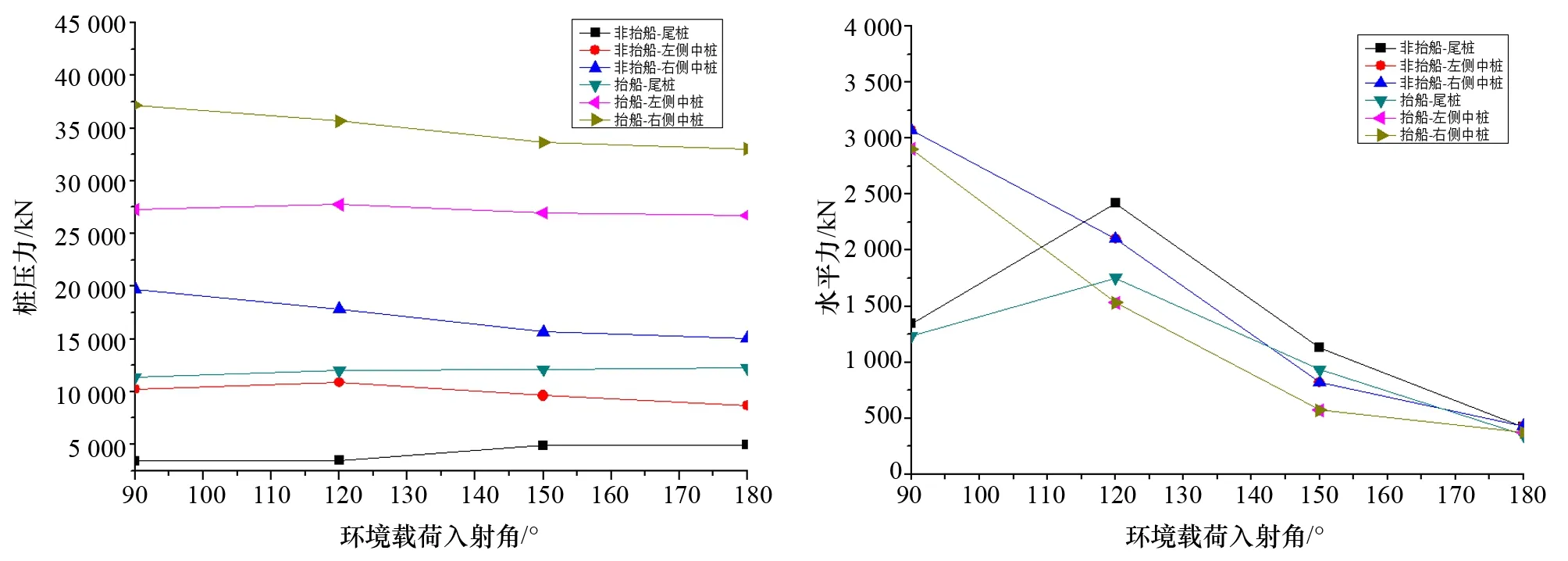
图13 三桩压力随环境载荷入射角变化趋势 图14 三桩水平力随环境载荷入射角变化趋势

图15 三桩压力随波浪周期变化趋势 图16 三桩水平力随波浪周期变化趋势
在波浪周期6 s~8 s时,随着波浪周期的增大,首桩压力呈现逐渐增大的趋势,尾桩压力先增大后减小。三桩水平力呈现逐渐增大的趋势。

图17 三桩压力随波高变化趋势 图18 三桩水平力随波高变化趋势
随波高的增大,抬船和非抬船状态下三桩所受到的压力和水平力均会增大。
5结论
(1) 考虑大型抓斗挖泥船作业特点,给出了抓斗挖泥船外载荷计算方法和定位桩受力计算模型。进行了实例计算,为200 m3大型抓斗挖泥船的定位桩设计提供了依据。
(2) 研究了定位桩受力随不同环境参数的变化规律,定位桩所受水平力随环境载荷入射角变化较大,抓斗挖泥船作业时应尽量迎浪作业以确保作业安全。
(3) 抬船可以使定位桩受到的压力增大,水平力减小。综合考虑定位桩的受力极限和抬船高度可以使定位桩的受力趋于合理,进而保障作业安全。
参考文献
[1]张晓莉.抓斗挖泥船钢桩的构成和功能[J]. 中国科技博览, 2010(29): 34-35.
[2]季湘岚.杨启与陈新权, 三桩定位反铲挖泥船载荷分析研究[J]. 船海工程, 2015(1): 5-10.
[3]魏虎仁.液压反铲挖掘船作业基本受力计算分析[J]. 船舶, 1996(3):39-44.
[4]苗得雨.绞吸式挖泥船定位桩系统受力分析[D]. 天津:天津大学,2008.
[5]OCIMF. Prediction of wind and current loads onVLCCs[C]. OCIMF 1994,15th Floor 96 Victoria Street London SWIE 5JW, 1994.
Load Analysis of Large pile Positioning Grab Dredger during Operation Process
WAN Hao1, CHEN Xin-quan1, YANG Qi1, FENGYong-jun1,DING Jin-hong1, DAI Yi-ping2
(1.State Key Laboratory of Ocean Engineering, Shanghai Jiao Tong University, Shanghai, 200240;2.Lioyd's Register(China) Co., Ltd, Zhejiang Zhoushan 316021, China)
Abstract:This paper studies the hydrodynamic performance of pile positioninggrab dredgerduring operation process,and establishes the calculation model of apile positioninggrab dredger with barge. Then we compute the load of dredger and three piles under different conditions and analysis the change regulation of piles' stress asmovement of grab and change of environmental load. It will be a basis ofpile's design.
Keywords:grab dredger; position pile; load analysis; hydrodynamic
中图分类号:U62
文献标识码:A
文章编号:1001-4500(2016)02-0082-08
作者简介:万浩(1992-),男,硕士研究生。
基金项目:大型抓斗式疏浚工程船及抓斗设备设计关键技术研究(工信部联装[2012]539号);高等学校博士学科点专项科研基金新教师类资助课题(20120073120014)。
收稿日期:2015-07-29