模糊PID在光伏发电系统MPPT中的应用
2016-06-02 02:27付丽君刘树贤
沈阳理工大学学报 2016年2期
付丽君,刘树贤
(沈阳理工大学 信息科学与工程学院,沈阳 110159)
模糊PID在光伏发电系统MPPT中的应用
付丽君,刘树贤
(沈阳理工大学 信息科学与工程学院,沈阳 110159)
摘要:分析了光伏电池的工作原理,建立其数学仿真模型,并分析了光伏阵列最大功率跟踪的原理以及在不同光照下的伏安特性,针对光伏电池输出的非线性及光照的随机性和不确定性等特点,结合模糊控制和PID控制各自的特点,设计了模糊PID控制器,实现光伏电池的最大功率点跟踪。仿真结果表明,该控制器响应快、超调小、稳定性好,并且扰动下可稳定地跟踪光伏电池的最大功率点。
关键词:PV建模;最大功率跟踪;PID;模糊PID
随着人类的进步,对能源的需求越来越大。化石能源的大量燃烧,使其变得紧张的同时引起严重的环境污染问题。太阳能因其安全可靠,无污染,以及取之不尽用之不竭等优势而具有很好的应用前景,将是未来主要绿色能源之一[1]。光伏电池具有非线性的输出特性,为了提高光伏发电系统的效率,对太阳能电池的工作过程进行最大功率点跟踪控制。
近年来,涌现出一些传统的算法,解决光伏电池的最大功率点跟踪问题,如恒定电压法(CVT)[2]、扰动观察法(P&O)[3]和电导增量法(INC)[4],但此类算法对外界环境变化,跟踪精度不足。本文针对传统算法的局限性及自适应外部复杂情况等诸多问题,在PID的基础上,提出模糊控制与相结合的模糊PID控制器。仿真结果表明,该控制器超调小,稳定性好,扰动下能快速稳定跟踪,改善了MPPT控制过程的动态性能,控制效果较理想。
1太阳能光伏电池特性分析
1.1建立光伏阵列的数学模型
光伏电池光照下会产生电流,理想条件可等效为恒流源。其理想等效电路如图1所示。

图1 光伏电池的实际等效电路图
光伏等效电路的I-V关系式[5]:
(1)
式中:Iph是太阳能的光生电流;I0是光伏电池反向饱和电流;K是玻尔兹曼常数,值为1.38×1023J/K;T是工作温度;q是电荷量,值为1.6×10-19C;A是理想因子,介于1到2之间;U是负载端电压;Rsh是高电阻;Rs通常小于1Ω,在理想电
路中均可忽略不计。
对光伏电池数学模型的分析,可得
(2)
式中:Isc=Iph;Uoc是开路电压;C1、C2为待定系数。
(3)
式中:Im是最大功率电流,Um是最大功率电压。
可得C2:
(4)
当外界条件改变时,外界对光伏电池特性产生影响,需要改动模型来描述新的环境下的特性曲线。电流与电压修正值为
(5)


图2 光伏电池模型
光伏电池模型的仿真参数为:标准温度Tref=25℃;标准光强Gref=1000W/m2;短路电流Isc=3.90A;最大功率电流Im=3.45A;开路电压Uoc=21.6V;最大功率电压Um=17.4V;最大功率P=60W。
温度为25℃时,在工作空间中输入的电压为:200W/m2,18.16V;400W/m2,19.07V;600W/m2,19.94V;800W/m2,20.79V;1000W/m2,21.06V。
标准光强下,在工作空间中输入的电压为:15℃,22.20V;25℃,21.06V;35℃,20.97V;45℃,20.35V;55℃,19.97V。
电压步长采用0.01,在工作空间中输入电压矩阵,会产生电流和功率矩阵,再利用plot命令,会产生不同光照强度和不同温度条件下的光伏电池的I-V、P-V输出特性曲线。
1.2温度及光强对输出特性的影响
依据Matlab仿真模型绘制出不同光强和不同温度下输出特性曲线如图3所示。

(a)温度为25℃时不同光照下的I-V特性曲线

(b)温度为25℃时不同光照下的P-V特性曲线
(1)温度为25℃,光照强度分别为200、400、600、800、1000W/m2时电池的I-V、P-V光伏特性曲线如图3所示。
由图3可知,温度为25℃,光强改变时,输出曲线不同。由图3a可知,短路电流随着光照强度的增加也大量增加,而开路电压却只有少量的增加。由图3b可知,光照强度增加最大功率点的位置也有所升高,由此可见影响光伏电池输出功率的一个重要因素是光照强度。
(2)光照强度1000W/m2,温度分别为15、25、35、45、55℃时的光伏电池的I-V、P-V输出特性曲线如图4所示。
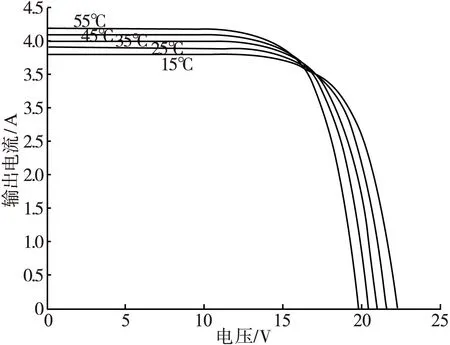
(a)光强为1000W/m2时不同温度下的I-V特性曲线

(b)光强为1000W/m2不同温度下P-V特性曲线
由图4可知,标准光强,温度改变时,输出曲线不同。由图4a可知,温度升高短路电流小幅度增加,而开路电压降低很多。由图4b可知,温度升高最大功率点的位置有所下降,所以,影响光伏电池的输出功率的另一个重要因素是温度。
2模糊PID控制器的设计
2.1模糊PID控制器的输入量和输出量
模糊自适应控制器[6]的设计原理如图5所示。
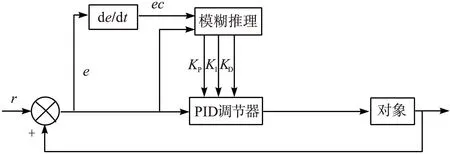
图5 模糊自适应整定PID原理图
本文设计的模糊PID控制器的输入量为误差e(k)=p(k)-p(k-1)和误差变化率,ec(k)=(p(k)-p(k-1))/(u(k)-u(k-1)),其中p(k)表示功率的采样值,p(k-1)是上一时刻的功率值,u(k)是光伏电池的电压值,u(k-1)是上一时刻的电压值,输出量为ΔKP、ΔKI、ΔKD,分别加上PID控制器初始值,从而得到实际的PID控制参数。
2.2确定输入量和输出量的模糊子集和论域以及隶属函数
将输入量e(k)和ec(k)以及输出量ΔKp、ΔKI、ΔKD采用负大、负中、负小、零、正小、正中、正大7种语言变量的模糊集来描述。即为{E、EC}={NB,NM,NS,ZO,PS,PM,PB}论域为{E、EC}={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。隶属度函数采用三角函数法。
2.3确定模糊控制规则
Kp为比例系数,整定规则为当响应在上升过程(e为P),ΔKP取正;当超调时(e为P),ΔKp取负;当误差在零附近时(e为ZO),分三种情况:ec为N,ΔKp取负;ec为ZO时,ΔKp取正;ec为P时,ΔKp取正。
KI是积分系数,整定规则为误差在零附近时,ΔKI取正,否则ΔKI取零。
ΔKp、ΔKI、ΔKD的模糊控制规则表如表1所示。
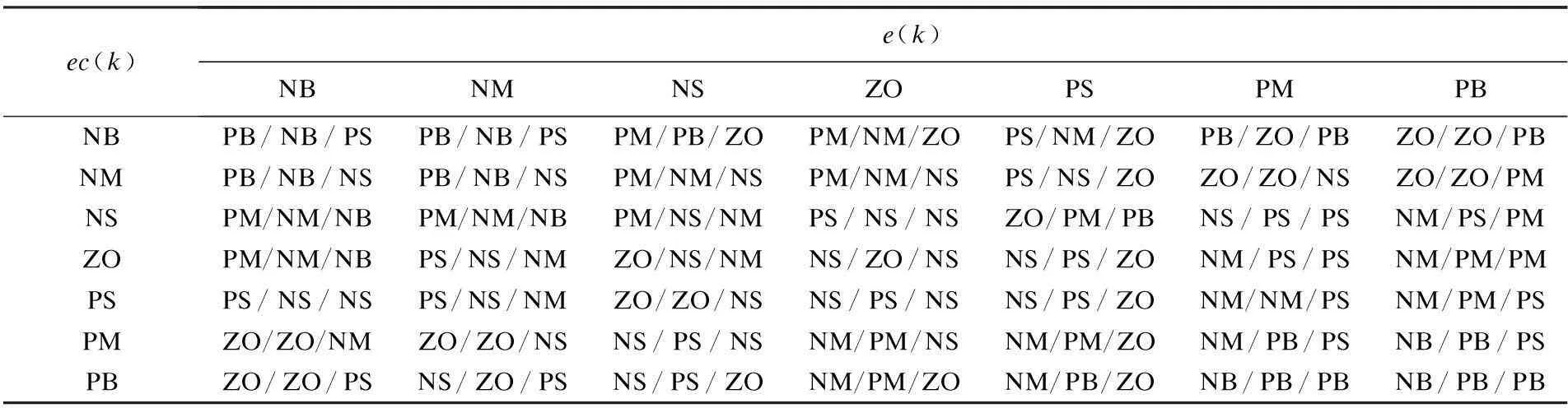
表1 模糊控制规则表
模糊规则定义如图6所示,在系统仿真时,规则观测器可以方便对模糊控制器内部的参数和规则实时观测,便于对模糊规则和隶属度函数的调整[7]。图7为模糊规则观测器。

图6 模糊规则定义

图7 模糊规则观测器
利用Matlab中的模糊工具箱,选择Mamdani控制器,采用重心法解模糊化,利用Simulink中的Fuzzy Logic controller模块搭建模糊PID模块。
3仿真实验
3.1仿真参数
在Matlab中,利用Simulink搭建系统模型,DC-DC电路采用升压型的Boost电路。参数设置为:电感为L=0.01H,电容为C=3×10-4F,电阻为R=20Ω,功率管为IGBT。主电路如图8所示。

图8 光伏发电系统主电路图
由图8可知,系统由PV、e(k)、PWM以及模糊PID模块组成。其中e(k)模块是误差模块,PWM模块作用是对MPPT控制器的最终曲线和三角波进行调制,得到PWM波,控制Boost电路中的IGBT器件的开关,从而控制其占空比,实现MPPT控制。e(k)模块和PWM模块中采样时间一致,为0.001s。图9为模糊PID模块。

图9 模块PID模块
模糊PID控制器以误差e(k)和误差的变化ec(k)作为输入量,输入量经模糊化和模糊推理后得到模糊控制器输出值,分别加上常规PID参数的初始值,实现对PID参数的调节。
3.2仿真结果分析
图10为常规PID控制后PV输出电压和Boost输出电压以及Boost输出功率波形图,仿真时,PID参数KP、KI、KD初始值分别设为0.5、2.5、0.01。光照在0.1 s时由800 W/m2扰动到1000W/m2。
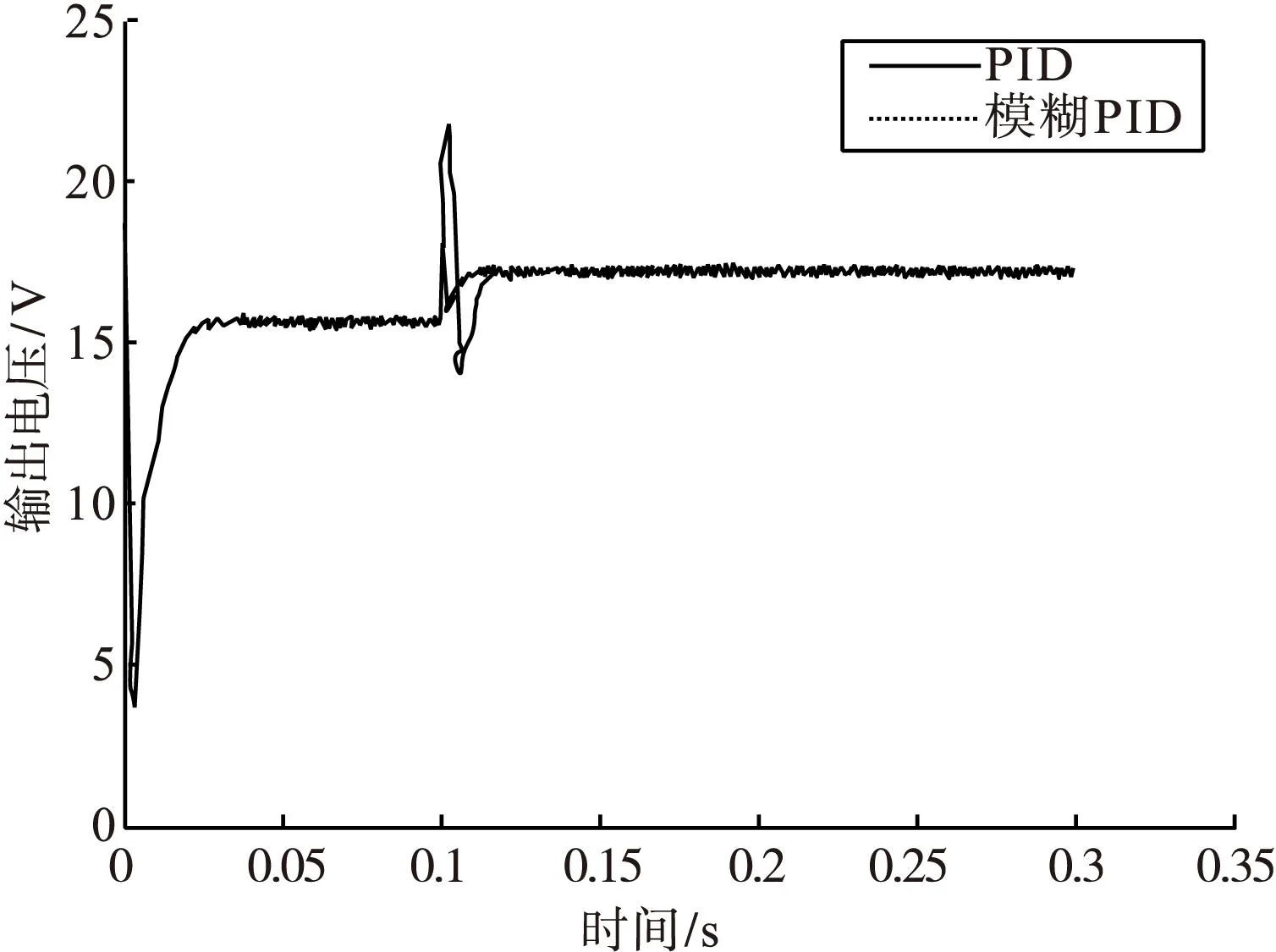
(a)PV电压输出曲线

(b)Boost电压输出曲线

(c)Boost功率输出曲线
由图10a可知,0.1 s出现扰动时,PID电压曲线超调达22V随后出现震荡为14V,在0.12s稳定跟踪;而模糊PID 0.1s出现扰动后,几乎没有超调和震荡现象,0.11s迅速达到稳定状态。由图10b可知,PID的Boost电压曲线可知,发生扰动后,出现32V的超调和20V的震荡,0.12s时稳定,而模糊PID扰动下没有超调和震荡现象,在0.11s迅速达到稳定状态。由图10c功率曲线可知,PID出现扰动后,功率曲线出现到大的震荡,之后震荡达52W,随后在0.13s达到稳定状态;而模糊PID在扰动下,几乎没有出现超调和震荡现象,并迅速达到稳定状态。因此扰动后模糊PID能很好地进行跟踪,响应速度快,提高系统的稳定性和快速性。
4结束语
对光伏电池的特性进行了分析,在Matlab上搭建了系统模型,对常规PID算法和模糊PID算法进行了仿真结果比较。仿真结果说明,将模糊PID控制方法应用于最大功率点跟踪是可行的。采用模糊控制优化PID参数方法跟踪光伏电池最大功率点后基本无波动,几乎没有超调和震荡现象,提高了系统的响应速度。因此模糊PID控制器跟踪响应快,稳定性好,具有良好的动态和稳态性能。
参考文献:
[1]朱拓斐,陈国定.光伏发电中MPPT 控制方法综述[J].电源技术,2011,35(10):1322-1328.
[2]赵庚申,王庆章,许盛之.最大功率点跟踪原理及实现方法的研究[J].太阳能学报,2006,27(10):997-1001.
[3]Liu Fangrui,Duan Shanxu,Liu Fei,et al.A Variable Step Size INC MPPT Method for PV Systems[J].IEEE Transactions on industrial Electronics,2008,55(7):3622-3628.
[4]郑晓斌,沈培辉.基于PLC 的太阳能光伏聚光发电随动系统的研究[J].陕西科技大学学报:自然科学版,2012,30(5):118-122.
[5]Huan-Liang Tsai.Insolation-oriented model of photovoltaic module using Matlab/Simulink[J].Solar Energy,2010(84):1318-1326.
[6]Mohamed M Algazar,Hamdy AL-monier,Hamdy Abd EL-halim,et al.Maximum power point tracking using fuzzy logic control[J].Int J Electr Power Energy Syst,2012,39(1):21-28.
[7]Enrico Bianconi,Javier Calvente,Roberto Giral,et al.Perturb and Observe MPPT algorithm with a current controller based on the sliding mode[J].Int J Electr Power Energy Syst,2013,44(1):346-356.
(责任编辑:马金发)
Application of Fuzzy PID to MPPT of Photovoltaic Power Generation System
FU Lijun,LIU Shuxian
(Shenyang Ligong Univercity,Shenyang 110159,China)
Abstract:The working principle of photovoltaic cells is analyzed,and the mathematical simulation model is set up ,and then the principle is analyzed to maximum power tracking of photovoltaic power generation system and volt-ampere characteristics under different illumination.For photovoltaic cells output of the nonlinear and light of randomness and uncertainty characteristics,combining with the characteristics of fuzzy control and PID control,fuzzy PID controller is designed,and the maximum power point tracking of photovoltaic cells is implemented.Simulation results show that the controller has fast response,small overshoot and good stability,which can steadily track the maximum power point of photovoltaic cells under disturbance condition.
Key words:photovoltaic cells modeling;MPPT;PID;Fuzzy PID
中图分类号:TP273
文献标志码:A
文章编号:1003-1251(2016)02-0048-06
作者简介:付丽君(1962—),女,副教授,研究方向:DSP在交流调速中的应用、电梯群控技术、变频器应用技术和电力电子装置的故障诊断。
收稿日期:2015-04-24