基于侧面轮廓的实时车型分类系统
2016-06-02 11:28叶玉婷王文鼐南京邮电大学通信与信息工程学院江苏南京210003
网络安全与数据管理 2016年10期
关键词:模式识别
叶玉婷,王文鼐(南京邮电大学通信与信息工程学院,江苏南京210003)
基于侧面轮廓的实时车型分类系统
叶玉婷,王文鼐
(南京邮电大学通信与信息工程学院,江苏南京210003)
摘 要:设计了一种基于侧面轮廓的实时车型分类系统。该分类系统分为3个部分:侧面轮廓处理、车型模板建立和实时车型匹配。轮廓处理部分介绍了一种用于实时测量移动车辆轮廓数据的采集仪器以及数据处理的方法。车型模板建立部分使用拟合算法构建不同车型的模板。实时车型匹配部分则采用修正豪斯多夫距离作为距离算法,用于衡量待测车辆与模板间的匹配程度。该模式识别系统能够完成准确快速的车型分类。
关键词:车型分类;修正豪斯多夫距离;模式识别;侧面轮廓
0 引言
智能交通系统(Intelligent Traffic System,ITS)是交通运输领域的前沿科技,广泛应用于交通运输管理、车辆调度系统和机动车自动控制系统。车型分类是ITS应用领域中基本功能模块和重要分支,是一门集计算机视觉、模式识别、工业测控技术、电子技术于一体的综合技术,能够自动、实时地对车型进行识别和分类,为交通管理、收费、调度和统计提供依据。
针对车型分类技术,国内外学者提出了很多种方法。红外探测法[1]是利用车道两侧的红外阵列检测器,运用几十甚至几百对红外收发装置,根据车辆行驶经过时不同部位对发射装置的阻挡作用采集车辆侧面几何数据,与数据库比较后判断车型,实现分类。该方法原理简单,但硬件系统复杂,成本较高。车牌识别法[2-3]从摄影图像识别到车牌号,并检索该车牌号得到相应的车型,完成车型分类。该方法需要完整的车牌号库,而且在车牌模糊或者车速过快的情况下容易造成误判。参考文献[4-6]利用高分辨率摄影机观察车辆的运动来估计车辆几何形状,通过特征点得到车辆轮廓。该方法对摄影机分辨率要求较高,且需要尺寸调节和角度校准。参考文献[7]设计了运动物体的检测、跟踪、识别系统,用训练的神经网络来识别运动物是人、车还是干扰,而后识别车辆类型。
本文设计了一种基于侧面轮廓的实时车型分类系统。该分类系统分为3个部分:侧面轮廓处理、车型模板建立和实时车型分类。本设计中轮廓数据是由设备直接测量得到的,不同于从视频数据提取轮廓的做法,该方法不需要多余的尺寸调节和角度校准,复杂度低。车型模板建立是根据采集到的大量车型轮廓,分类拟合构建模板,一种车型包括多个模板以提高车型分类的准确性。实时车型分类是采用修正豪斯多夫距离(Modified Hausdorff Distance,MHD)计算模板和待分类车辆的距离,完成快速、实时的车型分类。
1 侧面轮廓处理
车型侧面轮廓数据的处理包括两个部分:轮廓测量仪器和侧面轮廓数据处理。
1.1轮廓测量仪器
轮廓测量仪器的硬件组成示意图如图1所示。轮廓测量仪器由一个放置在龙门架顶部的超声波测距仪和一个放置在车道侧面的微波测速仪组成。
该轮廓测量仪器的工作原理如下:当车辆驶过轮廓测量仪器时,超声波测距仪以某一固定时间间隔(通常为10~50 ms)周期性地向下发射超声波,获得多个采样点,根据超声波从发射到接收的往返时间能得到一组高度集,该高度集为龙门架顶部到车辆顶部的距离集,图2所示为车辆驶过时的第一个、第二个和最后一个采样点示意图。用龙门架的高度减去测量的高度集即可得到经过车辆的侧面高度集合。结合超声波测距仪的采样数量和微波测速仪测得的车辆的速度,即可得到侧面宽度集合。将高度集合和宽度集合结合成为二维点集,用于表征驶经车辆的侧面轮廓。
该轮廓测量仪器成本低廉,性能稳定,可移植好,可以移植到龙门架或者天桥底部,完成车型侧面轮廓测量的功能。

图1 轮廓测量仪器硬件组成示意图
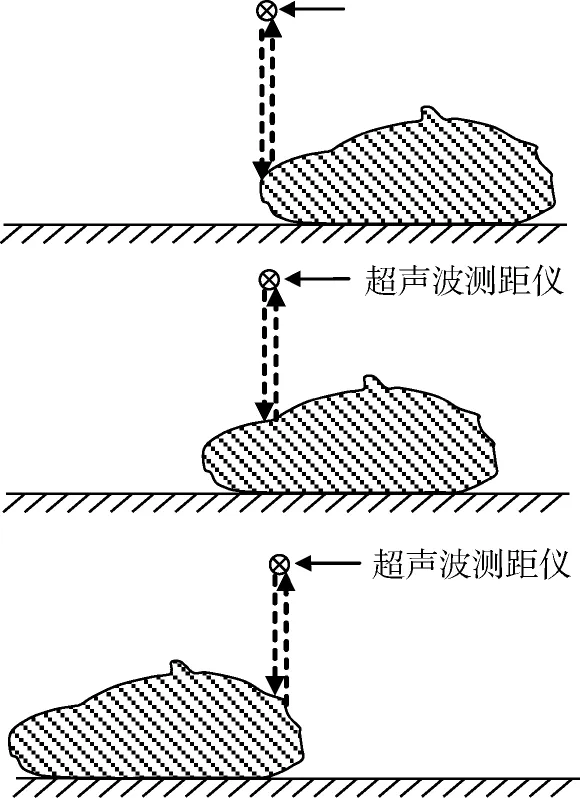
图2 超声波测距示意图
1.2侧面轮廓数据处理
实际试验中,采用龙门架高度h =550 cm;超声波测距仪间隔t=40 ms=0.04 s。
轮廓测量仪器能够测到以下数据:车辆速度v(m/s);采样点数n;龙门架到车顶的采样距离集合D ={di|i∈{1,2,…,n}}(cm)。
由以上数据可计算得到车辆侧面高度集合为:

其中,yi=h -di=550 -di(cm)。
车辆侧面宽度集合为:

其中,xi=0.04 v(2i-1)(cm)。
结合高度集合和宽度集合得到的二维点集即为车辆侧面轮廓数据:

图3所示为车辆侧面轮廓示意图,图中取采样点数n =11。
2 车型模板建立
公路交通部门依据机动车参数,包括车长、车高、承重轴数量、额定座位数或载质量等指标,将机动车分为6类:中小客车、大客车、小型货车、中型货车、大型货车、特大型货车。具体分类标准如表1所示。
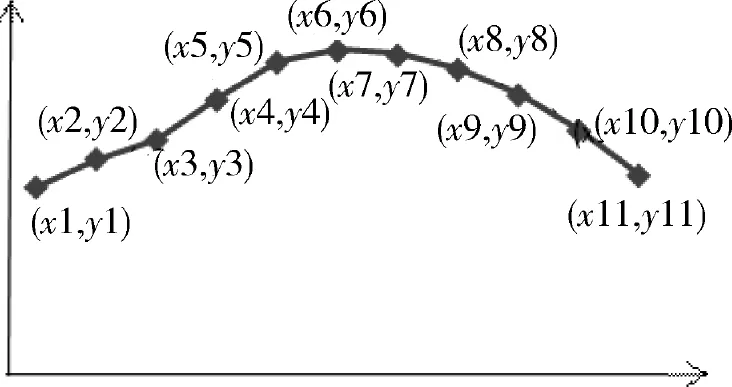
图3 车辆侧面轮廓示意图

表1 车型分类标准
轮廓测量仪器测得大量的车型侧面轮廓数据并存储在存储器中,经过筛选、拟合、训练等步骤构建模板库。一类车型可包括一个或者多个模板集,例如中小型客车可分为跑车模板、面包车模板、吉普车模板等。
3 实时车型分类
实时车型分类采用MHD算法计算模板和待分类车辆的距离,完成快速、实时的车型分类。
3.1MHD算法
有多种距离算法可被用模板匹配[8],其中,MHD的低时间复杂度和高匹配度,使其广泛应用于匹配计算。
豪斯多夫距离(Hausdorff Distance,HD)是拓扑学家HAUSDORFF F提出的一种用来度量空间中真子集的距离的算法。设X和Y是度量空间M的两个真子集,那么豪斯多夫距离H(X,Y)是最小的数r,使得X的闭r-领域包含Y,Y的闭r-领域也包含X。
MHD是DUBUISSION M-P和JAIN A K在HD算法基础上的改进算法[9]。该算法用距离表征两个点集的相似度。距离值越小代表两点集越相似,距离值越大代表两点集越不相似,特别的,当距离为0时两点集完全相同。
对于点集A={a1,a2,…,ap}和B={b1,b2…,bp},MHD的计算方法如下:

3.2车型分类
当待测车辆驶经廓测量仪器时,实时测量获得待测车辆的侧面轮廓数据,分别计算待测车辆与模板的MHD,与待测车辆距离值最小的模板即为匹配模板,判定匹配模板所属车型即为待测车辆的车型。以此完成快速、实时的车型分类。
4 结论
本文设计了一种基于侧面轮廓的实时车型分类系统。该系统设计了轮廓测量仪器的硬件组成、对轮廓数据的处理算法、建立车型模板库的方法和实时车型分类的过程。通过实验对该方法进行了可行性验证。结果表明对于实时车型分类,该系统能达到91%的正确率。接下来将会使用更多的车型进行试验,并在实际车道环境中搭建该系统进行测试。
参考文献
[1]顾国华,陈钱,张保民.一种基于红外检测的车型自动分类电子收费系统[J].交通信息与安全,2002,20(109):33-35.
[2]侯晓然,秦丽娟,王永,等.改进Retinex算法对特殊环境下的车牌图像增强研究[J].微型机与应用,2015,34(19):50-53.
[3]M ILLER K S,HARVEY T N,SHULDINER PW,at al.Using video technology to conduct the 1991Boston redion external cordon survey[R].Transportation Research Record,Washington,DC,1993(1412):46-56.
[4]严明,李玉惠,李勃,等.高速公路监控视频中运动车辆对象提取[J].微型机与应用,2014,33(2):41-43.
[5]吴亚斌,陈淑荣.一种基于监控视频的车型识别和车流量检测算法[J].微型机与应用,2015,34(7):45-48.
[6]FUNG G,YUNG N,PANG G.Vehicle shape approximation from motion for visual traffic surveillance[C].Proceedings of IEEE Conference on Intelligent Transport System,2001:608-613.
[7]COLLINS R T,LIPTON A J,FUJIYOSHIH,at al.Algorithms for cooperative multisensory surveillance[J].Proceedings of the IEEE,2001,89(10):1456-1477.
[8]李文凤,胡玉兰.基于图像显著区域检测的SIFT特征匹配方法研究[J].微型机与应用,2015,34(6):59-61,68.
[9]DUBUISSION M P,JAIN A K.A modified Hausdorff distance for objectmatching[C].Proceedings of12 th International Conference on Pattern Recognition,Israel,1994:566-568.
叶玉婷(1993 -),通信作者,女,硕士研究生,主要研究方向:网络与应用技术。E-mail:815033737@qq.com。
王文鼐(1966 -),男,博士,教授,主要研究方向:未来互联网和网络虚拟化技术。
引用格式:叶玉婷,王文鼐.基于侧面轮廓的实时车型分类系统[J].微型机与应用,2016,35(10):50-51,54.
Real-time vehicle classification system based on side profile
Ye Yuting,Wang Wennai
(School of Communications and Information Engineering,Nanjing University of Posts and Telecommunications,Nanjing 210003,China)
Abstrac t:This paper proposes a real-time vehicle classification system using side profiles of vehicles as characteristics.The system can be roughly divided into three stages:profile data processing,template establishment and real-time vehiclematching.In profile data processing,a profile data collection device is provided formeasuring the side profile ofmoving vehicles and data processingmethod.We investigate themethod to establish temp late library using fitting algorithm.Thus,the modified Hausdorff distance is proposed to determine the degree of resemblance between two side profiles.This pattern recognition system is capable of classifying vehicle types with high accuracy and low complexity. Key words:vehicle classification;modified Hausdorff distance;pattern recognition;side profile
作者简介:
收稿日期:(2015-12-28)
中图分类号:TP23
文献标识码:A
DOI:10.19358 /j.issn.1674-7720.2016.09.017
猜你喜欢
中成药(2018年2期)2018-05-09
中成药(2018年4期)2018-04-26
智能系统学报(2018年6期)2018-02-04
中成药(2017年10期)2017-11-16
智能系统学报(2017年5期)2017-01-22
电测与仪表(2016年2期)2016-04-12
电测与仪表(2016年6期)2016-04-11
燕山大学学报(2015年4期)2015-12-25
海军航空大学学报(2015年1期)2015-11-11
智能系统学报(2015年3期)2015-01-29