
混合动力汽车协调控制策略构架
2016-06-02 03:09长春工程学院电气与信息学院耿英楠赵迎辉蒋梦莹郭慕瑶
电子世界 2016年9期
长春工程学院电气与信息学院 张 允 耿英楠 杜 波 赵迎辉 蒋梦莹 郭慕瑶
混合动力汽车协调控制策略构架
长春工程学院电气与信息学院 张 允 耿英楠 杜 波 赵迎辉 蒋梦莹 郭慕瑶
【摘要】为了实现混合动力汽车节能减排的目标,本文设计了混合动力汽车协调控制策略总体构架,详细阐述了控制信号输入和输出模块,工作模式判别模块,转矩计算模块,转矩管理与工作模式协调控制模块等各主要模块的功能。通过典型工况循环测试,验证了该协调控制策略的有效性。
【关键词】混合动力汽车;工作模式;协调控制
1 混合动力汽车协调控制策略总体构架
混合动力汽车协调控制策略总体构架模型如图1所示,主要包括输入模块、总需求转矩计算模块、总目标分配转矩计算模块、工作模式判别模块,转矩管理与工作模式协调控制模块及输出模块六大部分。
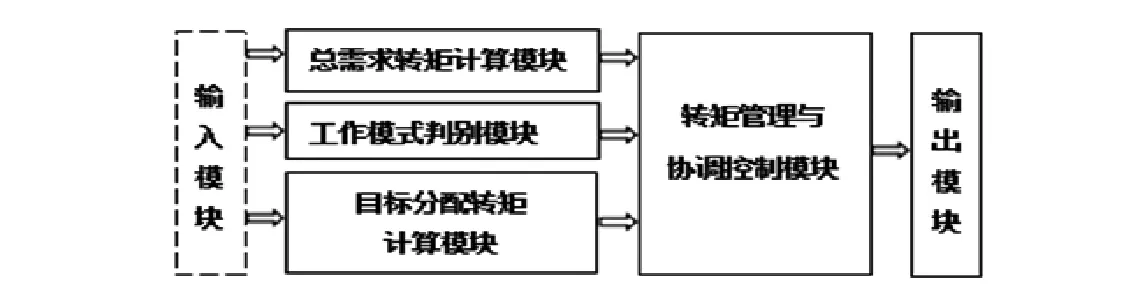
图1 混合动力汽车协调控制策略总体构架
2 各主要模块功能
2.1 输入/输出模块
该模块为控制策略的输入信号和输出信号部分,在实车中输入信号由传感器或执行部件ECU通过CAN总线提供给整车控制器(HCU),输出信号经HCU中的控制策略计算得到,由CAN总线传递到各执行部件控制器。各输出量主要包括:发动机、电机输出转矩命令;驱动模式命令;发动机、电机开关命令等。
2.2 需求转矩计算模块
要合理分配发动机和电动机的目标转矩,并对混合动力系统进行能量管理及工作模式的协调控制,首先均应对需求转矩进行识别。
总转矩需求由驱动转矩需求Td_req、制动转矩需求Tb_req和电池充电转矩需求Tch_req三部分构成。

2.3 工作模式识别模块
该模块主要根据驾驶员加速踏板开度、制动踏板开度、档位、车速等判断车辆工作模式,计算发动机、电机、离合器等执行部件的状态等。
2.4 分配转矩计算模块
(1)纯电动模式
此时,发动机关闭,发动机目标转矩为0,电动机单独驱动车辆,其目标转矩为需求转矩。
(2)纯发动机驱动模式
此时,发动机单独驱动,发动机的目标转矩等于需求转矩。而电动机关闭,其目标转矩为0。
(3)行车充电模式
此时,发动机驱动车辆并带动电动机主动充电,发动机目标转矩受发动机最大转矩、驱动转矩需求、电池最大允许充电转矩和电动机最大充电转矩的影响。而电动机的目标转矩为发动机的转矩与需求转矩之差。
(4)混合驱动模式
此时,发动机输出最大转矩,需要功率辅助,由电动机提供剩余的需求转矩。电动机的目标转矩为需求转矩与发动机转矩之差。
(5)减速/制动能量回馈模式
此时,发动机关闭,发动机目标转矩为0。当SOC小于峰值时,电动机处于发电状态,将动能转化为电能存储于电池中,此时系统为再生制动模式,电动机回收制动能量,电动机的目标转矩为电机转速与SOC的函数值。当SOC达到峰值时,电池不再有继续接收电荷的能力,此时再生制动模式切换为机械制动模式,将车辆动能以其他形式的能量耗散。此时,机械制动转矩为制动需求转矩与电动机的转矩之差。
2.5 转矩管理与工作模式协调控制模块
该模块对发动机转矩进行在线估计,对整车进行综合协调控制。
3 工作模式综合协调控制结果及分析
我们选取美国US06典型循环工况进行测试,并选取车速差均值作为整车动力性评价指标,选取百公里油耗作为整车经济性评价指标,选取电池SOC变化均值作为电池SOC平衡性评价指标,相应性能指标的对比情况如表1所示。
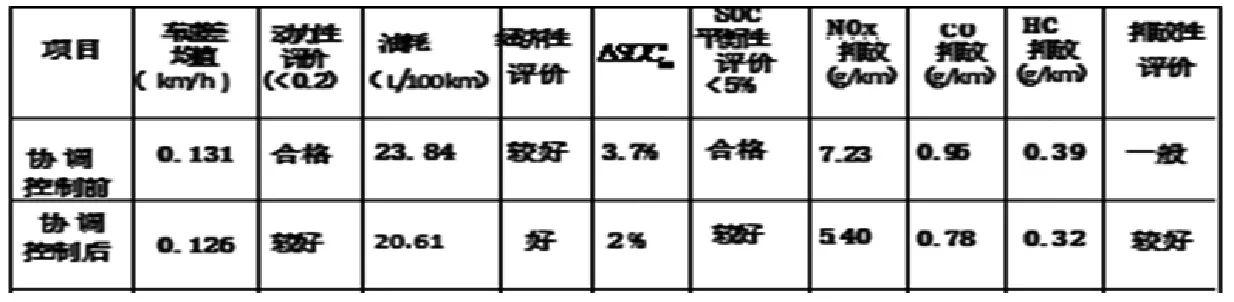
表1 工作模式协调控制仿真结果
结果表明优化控制后,整车动力性、经济性、SOC平衡性均比优化控制前有所提高,证明了本文建立的协调控制策略的有效性。
4 总结
本文基于模块化设计思想,将控制策略分为控制信号输入和输出模块,工作模式判别模块,转矩计算模块,转矩管理与工作模式协调控制模块共计六个模块。在此基础上,针对典型循环工况进行测试,仿真结果表明本文提出的协调控制策略能够有效地改善整车动力性、经济性与排放特性。
参考文献
[1]杨闻睿.混合动力整车控制单元技术的研究[D].上海﹕上海交通大学,2010.
[2]张建.混合动力公交车整车控制器的研究与开发[D].合肥﹕合肥工业大学,2012.
[3]秦健.一种基于PWM的电压输出DAC电路设计[J].北京﹕现代电子技术,2004(14).
[4]李至浩.混联式混合动力汽车整车控制器硬件系统设计[J].机械与电子,2011(9)﹕16-20.
[5]李鸿博.电动汽车蓄电池状态监测系统的设计[D].大连﹕大连理工大学,2011.
基金项目:吉林省教育厅基金项目《混合动力客车多目标综合协调控制技术研究》。
猜你喜欢
自动化学报(2017年4期)2017-06-15
汽车工程学报(2016年5期)2017-01-16
汽车工程学报(2016年6期)2017-01-11
中国检察官·司法务实(2016年11期)2016-12-05
法制与社会(2016年32期)2016-12-01
现代电子技术(2015年22期)2015-12-02
中国塑料(2015年3期)2015-11-27
空间控制技术与应用(2015年2期)2015-06-05
