
电致动介电高弹聚合物材料研究进展
2016-06-01 12:20:01郭飞泉翟志刚倪楷淇郑金杰
山东纺织科技 2016年2期
郭飞泉,刘 茜,翟志刚,倪楷淇,郑金杰
(上海工程技术大学,上海 201620)
电致动介电高弹聚合物材料研究进展
郭飞泉,刘 茜,翟志刚,倪楷淇,郑金杰
(上海工程技术大学,上海 201620)
介电高弹聚合物是一类活性软材料,被广泛应用于转换器。文章介绍了介电高弹聚合物材料的工作原理、工作模式,以及介电高弹聚合物材料的几种失效行为,总结了介电高弹聚合物的国内外应用现状。
介电高弹聚合物;驱动器;失效行为
电致动聚合物作为一种智能材料,具有很好的电性能和机械性能。其形状和体积在电刺激下会发生改变,电刺激消失后,能够恢复初始形态。常见的电致动聚合物主要有离子型和电场型,介电高弹聚合物是一种电子型的电致动聚合物材料,其特点有变形大、响应速度快、弹性能密度高、机电转化效率高、负载匹配性好、环境适应性好、抗疲劳寿命长并具有优异的仿生性能。
1 介电高弹聚合物的工作原理
1.1 介电高弹聚合物变形原理
介电高弹聚合物[1]是一种不可压缩的智能材料,能够在静电力作用下产生瞬发性物理变形,且响应速度非常快。其变形原理[2]是在材料的相对两面均匀地涂上柔性电极(如碳膏等),施加厚度方向上的电压后,电子从一端电极流向另一端,异性电荷能够相互吸引,产生静电力,介电高弹聚合物在静电力作用下会减小厚度,扩大面积(如图1-b)。而当切断电源后,则静电力消失,介电高弹聚合物会恢复初始状态(如图1-a)。
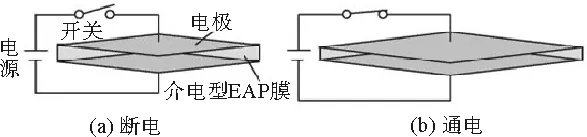
图1 变形原理
1.2 工作原理
介电高弹聚合物驱动器包括预载荷和EAP膜,其工作原理[3]是利用通电前后,EAP膜表现出不同的力-位移特性,与预载电荷力平衡。图2中,fp是预载电荷力线,fon是EAP膜通电工作状态下的位移曲线,fp、fon之间的力差是驱动器推程驱动力,2位置处为两者平衡处;foff是EAP膜断电工作状态下的位移曲线,fp、foff之间的力差是回程力,两者在1位置处平衡。
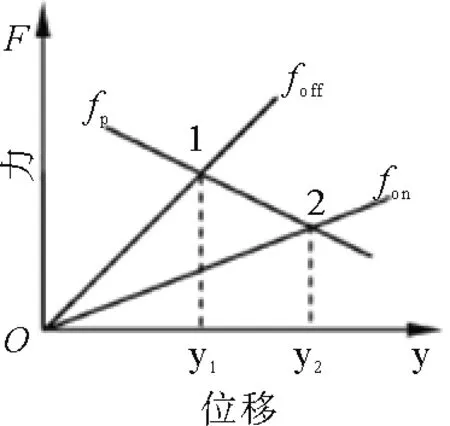
图2 驱动器力-位移图
2 工作模式
介电高弹聚合物工作模式分为驱动模式和能量收集模式[4]。不同研究需求下,可选择两种不同的工作模式实现电能与机械能之间的转换。
2.1 驱动模式
驱动模式是指将电能转换成机械能。通过在EAP膜的相对两侧施加电压,使介电高弹聚合物在静电力作用下减小厚度,扩大面积,此过程中电能转换成机械能输出。
2.2 能量收集模式
能量收集模式是指将机械能转换成电能。通过拉伸EAP膜充电后,将拉伸力撤除,EAP膜在弹性回复力作用下恢复未拉伸状态,此过程中,两侧电极上的异性电荷由于弹性回复力克服静电力做功,电荷间距离增大,同侧电极上的同性电荷间距离减小,因此电势能增加,机械能转换成电能输出。
3 介电高弹聚合物材料的失效
介电体有三类失效形式,包括断裂失效、击穿失效和起皱失效[5]。有多种因素能够引起介电体失效,如拉伸破裂、电击穿、力电失稳和张力损失。研究介电体失效行为对研发设计长寿命的驱动器有着重大的意义。
3.1 失效形式
3.1.1 断裂失效:断裂失效又称为机械失效,即材料失效,如图3-a,EAP薄膜在被过度拉伸时,变形范围超出薄膜所能承受的极限,则断裂失效发生,薄膜驱动器失去工作能力。
3.1.2 击穿失效:击穿失效又称为介电强度失效[6]。如图3-b,在施加电压使薄膜发生变形的过程中,由于所施加电压超过薄膜所能承受电压的极限值,薄膜被击穿,同时产生电火花现象,介电强度失效发生,薄膜驱动器失去工作能力。
3.1.3 起皱失效:起皱失效又称为力电失稳失效[7]。在施加电压过程中,薄膜材料厚度减小,面积扩大,此时电压大小保持不变,静电力则会增加,材料所能提供的弹性回复力不足以平衡静电力,因此发生起皱。

图3 失效形式
3.2 失效行为分析
3.2.1 电击穿
在对介电弹性体施加电压时,所施加电压超过其所能承受电压的极限值,薄膜被击穿,产生电火花现象,致使驱动器失去工作能力[8],如图4所示。假设EEB为介电弹性体击穿电压临界值。电压超出临界值,则电击穿发生;电压小于临界值,则不发生电击穿。击穿电场和薄膜变形程度满足:UEB=EEBdλ3λ-2,其中,d为薄膜厚度,λ为平面方向的等双轴拉伸下的拉伸率。
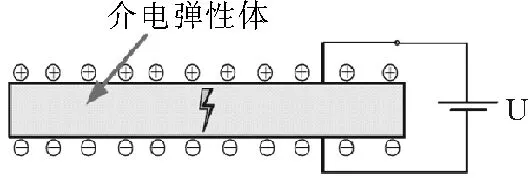
图4 电击穿
3.2.2 预拉伸破裂
在驱动器制作时,会对介电弹性体进行预拉伸,以此提高驱动器寿命。预拉伸过程中,拉伸变形若超出其所能承受范围则会导致其失去工作能力。如图5所示,在施加拉伸力F后,介电体中高分子聚合物链受到强烈拉伸,随着拉伸力的增大,薄膜发生硬化效应,在超出其所能承受的范围时,拉伸力F继续增加,则介电体发生拉伸破裂,导致材料失效。临界条件可由下列公式表示:λ=λR。
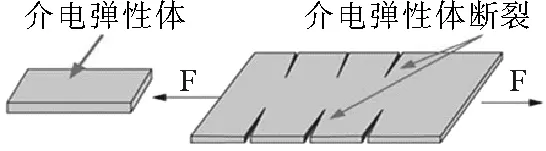
图5 预拉伸破裂
3.2.3 张力损失
当施加电压很高时,薄膜受到非常小的压力就会使薄膜产生褶皱,一些区域变薄使褶皱凸起,致使驱动器失去内应力作用而失效。如图6所示,拉力为零,张力损失,驱动器失效。

图6 张力损失
3.2.4 力电失稳
力电失稳是指在介电高弹聚合物的相对两侧施加电压,薄膜受静电力作用厚度减小,面积增大。如图7所示,当电压不变时,介电弹性体薄膜厚度不断变小,导致薄膜上的电场强度变大,从而使薄膜厚度进一步减小,循环往复,最终使电场强度超出介电高弹聚合物的临界电压,介电高弹聚合物薄膜被击穿,致使驱动器失效。
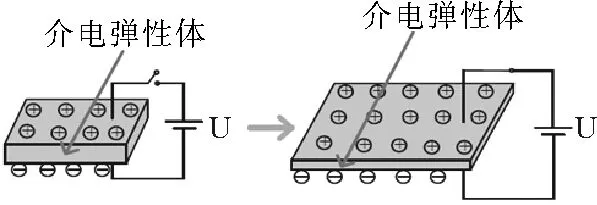
图7 力电失稳
3.3 起皱行为分析
如图8所示为张紧状态和起皱状态下的介电体薄膜,目前的起皱判别方法主要有三种:主应变判据、主应力判据、主应力应变联合判据[9]。
(1)主应力判据:主应力判据认为薄膜变形形态只与应力有关。当最小主应力大于零时,薄膜呈张紧状态;当最大主应力小于等于零时,薄膜呈起皱状态;当最大主应力和最小主应力都小于等于零时,薄膜呈松弛状态。
(2)主应变判据:当最大主应变为正,最小主应变小于单轴应力状态下的泊松比效应预测的应变时,薄膜成起皱状态;当最大应变为正,最小主应变大于单轴应力状态下的泊松比效应预测的应变时,薄膜呈张紧状态;当最大主应变和最小主应变都小于零时,薄膜呈松弛状态。
(3)主应力应变联合判据:当最大主应力和最大主应变都小于等于零时,薄膜呈松弛状态;当最小主应力大于0时,薄膜呈张紧状态;当最小主应力小于等于零,最大主应变大于零时,薄膜呈起皱状态。
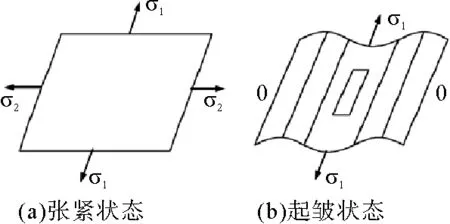
图8 起皱行为
4 介电高弹聚合物材料的应用现状
4.1 国外研究现状
目前,介电高弹聚合物的研究主要集中于介电型EAP驱动器的研究。主要有美国斯坦福Pel班Ne小组、美国麻省理工大学的Dubowsky教授、瑞士联邦工学院的EMPA研究所Wissler等人、意大利的Pisa大学的Carpi小组以及韩国成均馆大学的Choi等学者进行研究。现有介电型EAP驱动器形式主要有圆桶形、锥形、平面形、堆叠形、圆柱形以及菱形。Federico Carpi等人[10]研究制作出一种集成流体介电型EAP驱动器。这种驱动器由上下两个刚性圆盘固定,EAP薄膜环绕圆盘组成一个封闭的腔体,并在腔体中填充适量的液体从而保证驱动器腔体呈现圆桶状,同时对驱动器添加类似于压缩弹簧的对抗性元件以实现轴向预载荷的施加。试验测试证明,当施加适当工作电压时,这种驱动器最大可输出应变量为35%,其最显著的特点是可以通过调节腔内流体的密度实现调控驱动器质量。PatrickChouinard等人[11]利用介电型EAP驱动器驱动原理,研制出介电型EAP驱动的线性驱动器和摆动驱动器,在对两种驱动器作出一系列的测试与分析后,得出线性驱动器实际最大位移可以达到16 mm,摆动驱动器的正常工作范围为±40°。Federico Carpi 等人[12]在2007年研制出一种折叠形介电弹性体驱动器,并利用这种驱动器研制出机器人人手复位校正与人脸眼球控制系统。人手复位校正系统利用折叠式驱动器作为被动弹性体手与人手建立联系,从而通过一些测量装置,实现校正功能。机器人人脸眼球控制利用两个折叠式驱动器连接到一个眼球上,并通过折叠形驱动器的通电顺序来实现眼球的转动。
4.2 国内研究现状
国内关于介电高弹聚合物的研究起步较国外而言相对较晚。目前,国内几所大学、研究院对于介电高弹聚合物驱动器的设计、应用以及对驱动器的特性的研究尚处于初始阶段。中国科学技术大学的魏源远等人[13]在2006年对介电型EAP驱动器及其应变响应进行了研究,他们采用基于圆形介电弹性体驱动器模型的研究,观察其变形特性以及应变响应特性。试验结果表明:电极的柔软度必须与材料的性质匹配。太硬的电极会使介电弹性体应变变小,而太柔的电极会使介电弹性体易于击穿。预应变虽然减弱了单位电压下的变形量,但却能提高致动器的最大应变量。圆形介电弹性体驱动器只能用于介电弹性体材料特性的研究,而不能用来做实质性驱动。合肥工业大学的陈娟等人[14]对电场活化聚合物的变形进行了建模与仿真研究。他们采用电场活化聚合物的圆形与方形两种驱动器结构来进行研究,采用二次正交回归试验方法建立了电场活化聚合物变形的模拟仿真数学模型。通过试验结果与仿真结果进行比较,有效地验证了电场活性化聚合物材料的变形特性。2007年,合肥工业大学的李刚等人[15]采用 HN-1110T 型的介电弹性体,并根据材料的 Ogden本构模型设计了一种卷轴形一维伸缩致动器。卷轴形致动器能够实现将电能直接转化为直线运动。在电压为6500v作用下,驱动器输出位移只有3.6 mm。
5 结束语
介电弹性体能量密度高,应变大,效应高,具有材料非线性和几何大变形特性,而且其承受的载荷还具有多场耦合特点,比如机械力场和电场耦合,机械力场、电场和热场耦合等等。另外,虽然介电弹性体在致动器,机器人等工程领域应用潜力巨大,但商业应用仍然面临着巨大挑战。今后的研究过程中期望得到介电常数更高、柔性更好、驱动力更强、使用寿命更长的介电高弹聚合物材料。此外在新型驱动方面应用也具有重要的研究意义和研究发展空间。目前学者研究介电高弹聚合物复合材料的制作尚处于尝试阶段,没有取得较大突破,所以今后对于获得使用寿命更长,驱动力更强,柔性更好的介电弹性材料驱动器可以通过制作介电高弹聚合物复合材料来实现,同时通过复合材料制作各向异性的驱动器。
[1] 栾云广.介电型EAP驱动的伸缩移动机器人研究[M].南京:南京航空航天大学,2011.
[2] 王化明,朱剑英,叶克贝.介电弹性体线性驱动器研究[J].机械工程学报,2009,45(7):291—296.
[3] 周丽萍,王化明,魏礼建等.介电型EAP线性和弯曲驱动器研究[J].机械设计与制造,2014,(11):115—118.
[4] 朱银龙,王化明. 介电型电活性聚合物驱动器机电耦合合特性[C].南京:南京航空航天大学,2012.
[5] Vogan J. Development of dielectric elastomer actuators for MRI devices[C].Massachusetts: Massachusetts Institute of Technology, 2004.
[6] 叶克贝.介电弹性体线性驱动器研究[C].南京:南京航空航天大学,2009.
[7] 朱黎辉.电活性介电弹性体薄膜电应变特征的研究[C].吉林:吉林大学,2011.
[8] 朱银龙.介电EAP换能器机电耦合特性研究[C].南京:南京航空航天大学,2012.
[9] 罗晓健.介电弹性体力电耦合变形与能量转换行为分析[C].哈尔滨:哈尔滨工业大学,2013.
[10] Ron Peirine,RoyKornbluh,JoeEekerle,PhilJeuek,SeajinOh,QibingPei,ScottStanford.DielectricElastomers:GeneratorModeFundamentalsandAPPlieations[J].SmartStrueturesandMaterials2001:EleetroaetivePolymerAetuatorsand Deviees,2001,(4329):148-156.
[11] Carpi F, Gabriele F, and De Rossi D. Contractile Hydrostatically Coupled Dielectric Elastomer Actuators[J].IEEE,2011.GoulbourneN, FreckerM,MockensturmE,etal.Modeling of a Dielectric EAP Diaphragm for a Prosthetic Blood Pump[C]. Smart Structure and Materials: Electroactive Polymer Actuators and Devices(EAPAD), San Diego, 2003.
[12] F.Carpi.D. De Rossi,Contractile folded dielectric elastomer actuators, Proceedings of Spie[J]. Smart structures and materials 2007,(6524),300—305.
[13] 魏源远,冯志华,刘永斌,张平,介电弹性体致动器及其应变响应研究[J],功能材料与器件学报,2006,12(6):501—504.
[14] 陈娟,吕新生,电场活化聚合物材料特性的数学建模研究与分析[J],安徽工业大学学报,2007,24(1):50—54.
[15] 李刚,电场活化聚合物(DE)一维伸缩致动器设计[C].合肥:合肥工业大学,2007.
Progress in the Study of Electrically Actuated Dielectric High Elastic Polymer Materials
GuoFeiquan,LiuQian,ZhaiZhigang,NiKaiqi,ZhengJinjie
(Shanghai University of Engineering Science,Shanghai 201620,China)
Dieletric elastomer is a kind of active soft material,which is widelyused in converter. The working principle, working mode and the failure behavior of the Dieletric elastomer were introduced.The application status of the high elastic polymer at home and abroad were summarized.
dieletric elastomer; actuator; failure behavior
2016-03-01
上海工程技术大学市级大学生创新项目(cs1509003)
郭飞泉(1994—),男,福建莆田人,学士。
TS101.3
A
1009-3028(2016)02-0053-04
猜你喜欢
小猕猴学习画刊·下半月(2024年6期)2024-07-09 12:32:38
课外生活·趣知识(2023年9期)2023-10-08 19:14:56
石油沥青(2022年4期)2022-09-03 09:29:40
建材发展导向(2022年12期)2022-08-19 02:31:08
石油沥青(2021年5期)2021-12-02 03:21:08
弹性体(2021年6期)2021-02-14 05:39:00
模具制造(2019年10期)2020-01-06 09:13:02
模具制造(2019年4期)2019-06-24 03:36:42
石油沥青(2018年4期)2018-08-31 02:29:44
材料科学与工程学报(2016年1期)2017-01-15 13:34:10
