中低速磁浮线F型钢轨轨道接头伸缩调节器结构设计
2016-06-01 01:05:21蔡文锋
城市轨道交通研究 2016年1期
关键词:结构设计
李 艳 蔡文锋 颜 华
(中铁二院工程集团有限责任公司科学技术研究院,610031,成都∥第一作者,工程师)
中低速磁浮线F型钢轨轨道接头伸缩调节器结构设计
李 艳蔡文锋颜 华
(中铁二院工程集团有限责任公司科学技术研究院,610031,成都∥第一作者,工程师)
摘 要中低速磁浮线既有的轨道约束方式和一般接头结构无法适应轨缝伸缩量超过40 mm的轨道设计要求。本设计的轨道伸缩调节器结构,将纵向间隔设置的钢轨枕单元,通过纵向连接板和筋板结构连接成一个整体;并在纵向连接板上考虑地脚螺栓式、弹条扣压式和扣板式三种约束方式,从根本上改变了既有轨道结构及其约束方式。轨道伸缩调节器结构可使桥梁和轨道之间产生相对运动,以释放桥梁过大的纵向伸缩变形,从而减小大跨度桥梁伸缩量对行车的影响。
关键词中低速磁浮线;轨道伸缩调节器;结构设计
Author's address address Science and Technology Research Institute,China Railway Eryuan Engineering Group Co.,Ltd.,610031,Chengdu,China
中低速磁浮线以其成熟的常导电磁铁吸力型悬浮、导向技术以及国内近10年的试运线成功经验,逐步在众多城市轨道交通制式[1]中脱颖而出,具有广阔的市场应用前景。
中低速磁浮轨道结构主要采用钢轨枕型式,轨道自上而下主要由感应板、F型钢轨(以下简为“F轨”)、伸缩节、连接件、紧固件、H型钢轨枕、扣件、道床等部分组成,以轨排为单元整体铺装。两段F轨的通过接头进行连接。考虑中低速磁浮车辆悬浮控制系统特点和车辆行车需要,F轨的接头轨缝大小是受到限制的。在城镇建设行业标准CJ∕T 413—2012《中低速磁浮交通轨排通用技术条件》[2]中,定义了I型、II型和III型三种F轨接头,但其可承受的轨缝伸缩量亦是有限的,轨缝伸缩量变化范围仅为10~40 mm。既有接头结构是被动地适应两段F轨的轨缝伸缩量,并不能从根本上对轨缝伸缩量进行主动调节。由于国内试运线[3-4]的桥梁通常采用简支梁或小跨度混凝土连续梁(长度通常在20 m左右),桥梁和轨道的温差伸缩变形基本控制在40 mm以内。因此,对于中低速磁浮线轨道伸缩调节器的研究还未得到足够重视。在迄今为止的国内外已公开的技术资料中,尚无有关介绍适合于大跨度桥梁上使用的中低速磁浮线轨道伸缩调节器装置。
但是,当桥梁跨度增大时,温度引起的桥梁伸缩变形将增大,在设计温度范围内形变量可达200 mm及以上。若继续沿用当前中低速磁浮轨排通过扣件固定在桥梁梁体上、相邻轨排之间采用一般F轨接头联结的轨道约束方式,线路设计中就必须严格限制桥梁跨度,这将影响中低速磁浮线在大跨度桥梁上的适应性,不利于中低速磁浮交通技术的推广。随着中低速磁浮线作为一种新型城市轨道交通制式在大中城市内及旅游景区的逐渐推广应用,必将面对多种多样跨越河谷与城市主要道路的情况[5],因此,针对大跨度桥梁情况,中低速磁浮线轨道伸缩调节器的设计和研究就十分必要。
1 中低速磁浮线轨道伸缩调节器结构设计思考
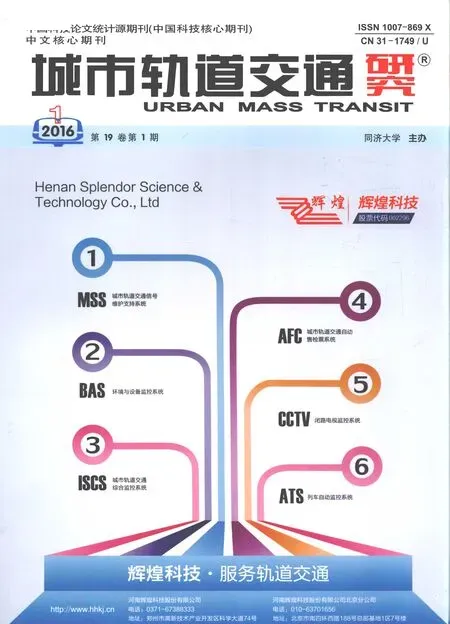
既有的中低速磁浮线的钢枕单元通过螺栓固定在现浇于桥梁体的承轨台上(见图1),这种固定方式限制了轨排和桥梁体之间的相对运动,导致轨排与桥梁一同伸缩,在轨面上仅能通过F轨接头进行调节;而过大的伸缩量将给接头设计和车辆悬浮控制带来难度,且会影响行车安全。
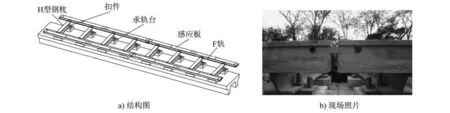
图1 既有轨排和桥梁的连接方式
桥上轨缝设置主要为适应轨排自身的伸缩量以及桥梁梁体伸缩变形。现以长沙磁浮工程初步设计跨越浏阳河Ⅳ级主河道的浏阳河特大桥为例进行说明。该特大桥设计采用矮塔斜拉桥方案(见图2),桥梁伸缩量(考虑升温25℃、降温25℃、收缩、徐变等)为161.3 mm。

图2 长沙磁浮线浏阳河大桥主桥总体布置图(初步设计)
根据TB 10082—2005《铁路轨道设计规范》,轨缝计算公式为:
Δ=αL(Tmax-t)-C式中:
Δ——轨缝值,mm;
α——钢轨钢线膨胀系数,取1.18×10-5∕℃;
L——钢轨长度,mm;
Tmax——当地历史最高轨温,℃;
t——铺设锁定轨温,℃;
C——接头阻力和扣件、道床纵向阻力限制钢轨自由伸缩的数值,mm。
针对长沙磁浮工程,F轨及轨排标准长度初步设计为25 m,长沙地区历史最高轨温63℃,最低轨温-11.3℃,铺设锁定轨温取25℃,接头阻力取400 k N,扣件阻力取26 k N,考虑桥梁伸缩量,据此计算,在极端气温变化条件下,梁端钢轨伸缩量最大约190 mm。
桥梁的伸缩形变量由桥梁材料自身特性而决定,不能从结构设计上控制形变量,因此,为减小桥梁伸缩量对行车的影响,只能考虑在纵向释放桥梁的伸缩,使之与轨道结构之间能有相对运动。这需要从根本上改变既有轨道结构及其约束方式。本文提出了轨道伸缩调节器结构设计方案[6],其结构如图3所示。
此结构由纵向间隔设置的钢枕单元、筋板和纵向连接板等组成,将已有的单个钢枕单元通过纵向连接板连接成一个整体,并通过焊接的筋板结构加强轨道伸缩调节器的整体刚性。钢枕单元两端开设有配合F轨固定的安装孔,利用螺栓组件将F轨固定在钢枕单元上,以保证轨排与F轨之间无相对运动,形成轨道模块。
相对于既有的钢枕单元H型钢底部的螺栓固定约束方式,伸缩调节器的约束方式则可转变为对纵向连接板的约束。按约束方式的不同,本文设计了地脚螺栓式、弹条扣压式和扣板式三种型式。
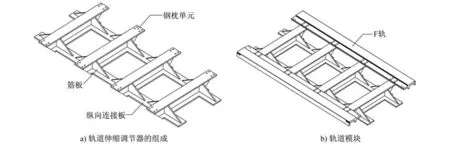
图3 中低速磁浮线轨道伸缩调节器结构
2 地脚螺栓式轨道伸缩调节器结构设计
2.1结构特点
地脚螺栓式轨道伸缩调节器结构[6]如图4所示。其主要考虑在纵向连接板纵、横向间隔布置纵向延伸的长槽孔;在筋板式轨排底面与桥梁体表面间设置轨下支撑减振体;利用地脚螺栓组件实现轨下支撑减振体和纵向连接板之间的连接。其中,轨下支撑减振体自上而下包含减振垫、铁垫板和承轨台。地脚螺栓组件底部预埋嵌入桥梁结构中,可实现轨下支撑减振体和地脚螺栓组件之间不产生相对运动,使其成为一个固接的承轨模块。而纵向连接板的长槽孔则可释放承轨模块的纵向运动。
图4 地脚螺栓式轨道伸缩调节器
在桥梁因温差发生大的伸缩变形时,承轨模块会跟随桥梁一并运动;而轨排与减振垫之间的摩擦阻力远远不足以抵抗桥梁的温差形变力,轨排与桥梁之间必将产生相对运动,可通过释放桥梁的纵向大伸缩量控制轨道模块的小纵向位移。轨道模块纵向承受的合力是由摩擦阻力、轨道模块在F轨接头处受到相邻轨道模块施加的纵向反力以及磁浮车辆通过时的牵引力或制动力组成。为防止车辆通过而引起的轨道运动,设计的摩擦阻力就必须高于车辆牵引力或制动力,可以此设计地脚螺栓组件尺寸和预紧力大小。长槽孔长度根据桥梁跨度、轨道结构设计温度范围和结构伸缩变形量而确定。
2.2效果
地脚螺栓式轨道伸缩调节器,可大大减小桥梁与轨道的纵向相互作用力,改善轨道和桥梁的受力状态,同时能有效释放大跨度桥梁因温度变化而产生的大伸缩变形,适应40 mm及以上的桥梁伸缩变形;可保持F轨的轨缝变化不致过大,稳定连接相邻的轨排,维持线路平顺,从而提高中低速磁浮线的系统适应性,确保车辆安全、平稳地运行;其结构简单、便于安装和加工,且易于维护,可提高轨道铺设效率,减少投资和运营维护成本。
3 弹条扣压式轨道伸缩调节器结构设计
结合一般铁路常用的弹条扣件应用情况,在轨道伸缩调节器的约束方式上亦引入了此弹条扣压结构。弹条扣压式轨道伸缩调节器结构[7]如图5所示,主要由轨道伸缩调节器、弹条、承轨台、垫板、钢枕横向挡块和地脚螺栓组件等组成。根据承轨结构投影面的不同,设计了矩形和T形投影两种承轨结构。垫板上设计了2个或3个弹条固定凸块,分别位于纵向连接板的内侧、外侧,以配合弹条的固定;钢枕横向挡块放置在弹条固定凸块和钢枕之间,以调整轨道伸缩调节器横向位置,并限制其横向位移。利用地脚螺栓组件及弹条,将承轨台、垫板与桥梁组成了一个运动体,通过弹条扣压力转换为轨排底部和承载模块间接触面的摩擦力,实现承载模块和轨排的纵向相对运动,以释放大跨度桥梁的伸缩变形。弹条材质的选型应充分结合磁浮车辆通过时的牵引、制动特性,以及轨排和垫板间的摩擦特性、弹条扣压力和纵向阻力特性而确定。
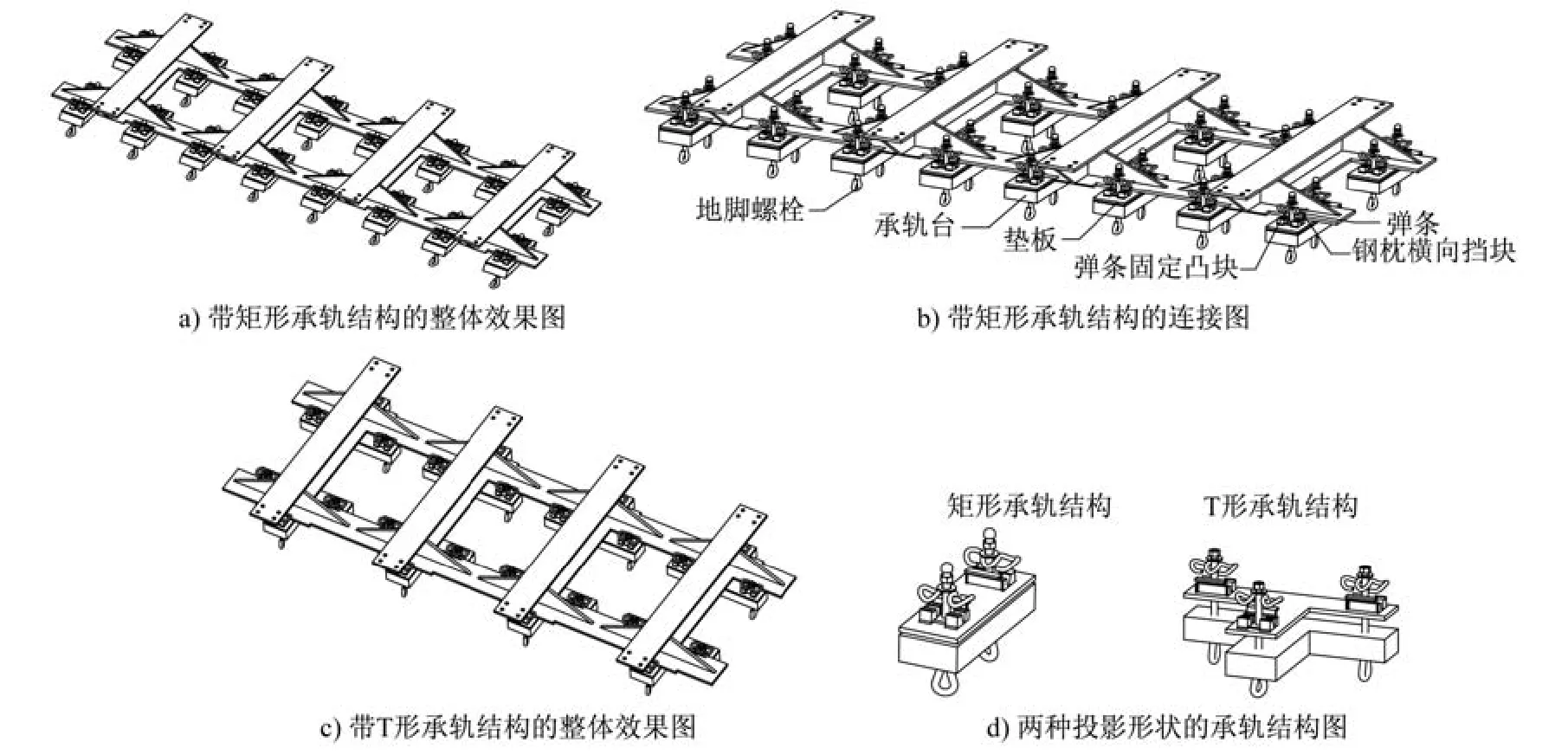
图5 弹条扣压式轨道伸缩调节器
矩形投影的承轨结构在单个钢枕单元下方形成了四点扣压,结合轨排结构强度和弯曲变形特性,合理布局承轨台位置,可消除单个H型钢枕底部处于悬空状态而引起的结构强度和弯曲变形问题。T形投影的承轨结构在单个钢枕单元下方形成了六点扣压,可充分保证轨道伸缩调节器强度和抗弯变形能力,同时通过合适的弹条扣压力和纵向阻力设计,可有效消除磁浮车辆通过时引起的轨排运动。
本结构中无需对轨道伸缩调节结构进行开槽处理,便可达到地脚螺栓式结构释放桥梁大伸缩变形的目的,且更进一步简化了结构,保证了整体刚性。
4 扣板式轨道伸缩调节器结构设计
扣板式轨道伸缩调节器[8],主要采用扣板结构替换弹条结构进行轨道伸缩调节器的约束,如图6所示。
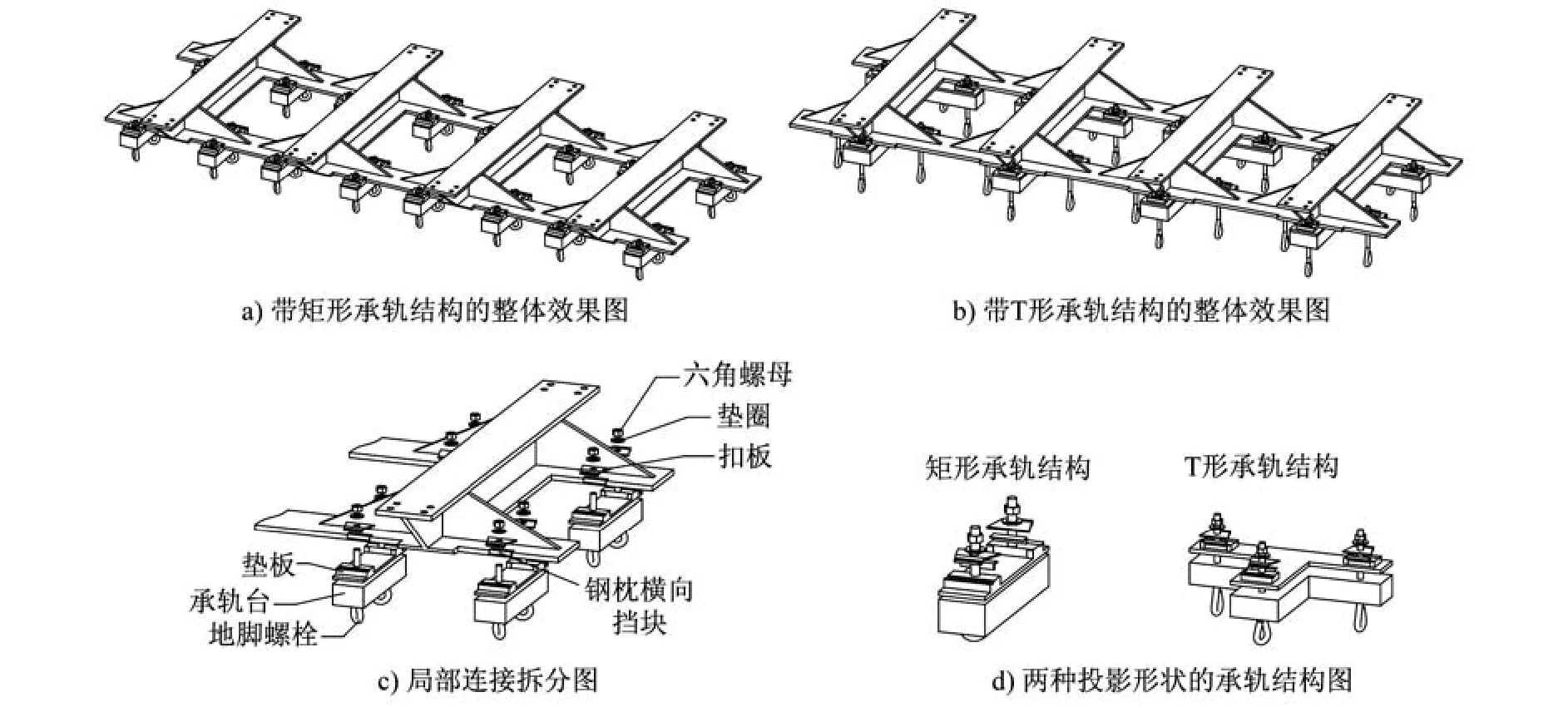
图6 扣板式轨道伸缩调节器
扣板简洁的结构和小尺寸外形,利于承轨台和垫板尺寸更进一步地减小,可降低投资和运营维护成本。扣板数目及其所需提供的扣压力和纵向阻力的设计,应结合现有磁浮车辆通过的牵引制动特性、扣板材质、外形、轨排底部和承载模块间接触面的摩擦特性以及轨排结构的强度和抗弯变形特性而确定。矩形和T形投影的承轨结构同样适用于扣板式轨道伸缩调节器。
5 结语
针对大跨度桥梁因温差引起的伸缩问题,本文提出了轨道伸缩调节器结构设计方案,考虑其定位方式的不同,设计了地脚螺栓式、弹条扣压式和扣板式三种方案。为更进一步研究三种轨道伸缩调节器的工程可实施性,下阶段还需结合结构强度理论分析、样件试制、试验线路试铺和试验测试等工程数据而开展工作。
参考文献
[1] 李东屹.新型轨道交通捷运系统在郊区新城中的适应性分析——以上海临港新城为例[J].交通与运输,2011(05):51.
[2] CJ∕T 413—2012中低速磁浮交通轨排通用技术条件[S].
[3] 张佩竹.中低速磁浮交通唐山试验线工程实践及设计反思[J].铁道标准设计,2009(11):22.
[4] 杨其振,刘道通,于春华.中低速磁浮交通轨道工程研究与设计[J].铁道标准设计,2010(10):35.
[5] 中铁二院工程集团有限责任公司.长沙磁浮工程初步设计——第一篇总说明书[R].成都:中铁二院工程集团有限责任公司,2014.
[6] 李艳,蔡文锋,颜华.中低速磁浮交通系统轨道伸缩调节结构:中国,CN 203923905 U[P].2014-11-05.
[7] 李艳,蔡文锋,颜华.弹条扣压式中低速磁浮交通系统轨道伸缩调节结构:中国,CN203923903 U[P].2014-11-05.
[8] 李艳,蔡文锋,颜华.扣板式中低速磁浮交通系统轨道伸缩调节结构:中国,CN203923904 U[P].2014-11-05.
(Continued from Special Commentary)
cities with environment sensitiveness and middle-low passenger flow demand,or they could be used as the public transport backbone of urban new districts,and the“trams in combination with urban rapid rail transit"mode should be paid attention to,so as to form a multi-level,three-dimensional,fish-bone type transportation system.
(2)Intersection-passing delays and parking-time at the station are the main influence factors of the minimum departure interval of trams.Comprehensively considering urban road traffic organizations,operation benefits and tram-driving safety,under the condition of the relative priority of signals:①at the initial stage of operation,the minimum departure intervals during high peak periods should not be greater than 10 min,and the maximum departure intervals during flat peak periods should not be greater than 15 min.②at the future stage of operation,the minimum departure intervals during high peak periods should not be greater than 5 min,and the maximum departure intervals during flat peak periods should not be greater than 10 min.
(3)Under the conditions of the average spacing of 500~600 m at intersections and the average spacing of 600~700 m at stations and when the relative priorities strategy of signals is implemented,the tram travel speed is 18.4~20.8 km∕h.The travel speed range of modern trams is 15~25 km∕h.Based on the function orientation of modern trams and their own characteristics,it is suggested that not less than 18 km∕h travel speed should be taken as the target value of travel speed at the design phase.
(4)When the whole line adopts the relative priorities strategy of signals,the reasonable transport capacity of 5 module vehicles is 5 000~8 000 person-time∕h,and the maximum transport capacity of 7 module vehicles is not more than 10 000 person-time∕h.Based on the different travel speeds and the different departure intervals,when the travel speed is 20 km∕h and the minimum departure interval at the high peak periods of initial stage is 8 min,the vehicle configuration per km in oneway direction is 0.4 vehicle;when the minimum departure interval at the future stage is adjusted to 5 min,the vehicle configuration per km in one-way direction is 0.6 vehicle.
(5)Considering the operating efficiency and the actual transport capacity of modern trams,if the proposed tram line is predicted that the passenger flow strength in the long term is less than 4 000 person-time per km per day or more than 10 000 person-time per km per day,the modern tram system is not recommended.If the passenger flow load strength at the initial stage is less than 2000 person-time per km per day,the tram line should not be implemented in the recent periods.
(6)The suitable average distance of modern trams’carrying passengers is 5~9 km.The suitable line-layout length range is 9~18 km.The shortest line-length should not be less than 7 km,the longest line-length should not be greater than 25 km,and the longest line of small and medium-sized cities should not be greater than 20 km.
(Translated by Sun Zheng)
Structural Design of F-shaped Track Joint Expansion and Contraction Adjuster for Mid-low Speed Maglev Line
Li Yan,Cai Wenfeng,Yan Hua
AbstractThe existing track constraint ways and the structure of general track joint used for mid-low speed maglev system are unable to meet the track design requirements for large expansion and contraction joint that exceeds 40mm.A new track expansion and contraction joint adjuster is designed,where the longitudinal-arrayed rail sleepers are connected by longitudinal connecting plates and ribs.The adjuster is constrained by three ways:the foundation bolt,rail spring clip and spring blade,they have changed the traditional track structure and constraint ways.Since relative movement exists between track and bridge,the large longitudinal expansion and contraction of a bridge can be released.This adjuster design could reduce the impact of bridge expansion and contraction on train safety running.
Key wordsmid-low speed maglev line;track joint expansion and contraction adjuster;structure design
中图分类号U 213.4+6:U 237
DOI:10.16037∕j.1007-869x.2016.01.028
收稿日期:(2015-02-03)
猜你喜欢
建材发展导向(2023年6期)2023-03-31 02:51:38
建材发展导向(2022年6期)2022-04-18 08:17:26
建材发展导向(2021年13期)2021-07-28 07:15:50
建材发展导向(2021年11期)2021-07-28 06:57:42
防爆电机(2020年4期)2020-12-14 03:11:14
中国核电(2017年1期)2017-05-17 06:10:04
电子制作(2016年1期)2016-11-07 08:43:05
专用汽车(2016年5期)2016-03-01 04:14:49
专用汽车(2016年5期)2016-03-01 04:14:48
中国房地产业(2016年2期)2016-03-01 01:25:23