
基于Simulink的三相异步电机的研究与仿真*
2016-06-01 11:35仲大庆孙欢欢
电气传动自动化 2016年4期
仲大庆,饶 顶,孙欢欢
(1.中国电子系统工程第二建设有限公司,江苏无锡214000;
2.扬州大学水利与能源动力工程学院,江苏扬州225127)
基于Simulink的三相异步电机的研究与仿真*
仲大庆1,饶 顶1,孙欢欢2
(1.中国电子系统工程第二建设有限公司,江苏无锡214000;
2.扬州大学水利与能源动力工程学院,江苏扬州225127)
异步电机的动态数学模型为一个高阶、强耦合、非线性的多变量系统,且在非正弦供电变频装置下运行,传统的分析方法很难适应这样复杂系统的分析。为了简化电机的研究方法,对三相异步电机模型进行分析,利用坐标变换原理推导出其在αβ0坐标系下的动态数学模型,通过Matlab软件中的Simulink组件建立电机的数学模型,研究与仿真了电机在理想空载与满载时的启动过程。结果表明Simulink能高效、较准确地对电机进行仿真。
坐标变换;Simulink仿真;空载起动;满载起动
1 引言
随着电机控制技术的不断发展,越来越多的交流调速系统已经取代了直流调速系统在工业中的应用,然而,对现代交流调速系统进行分析的方法在经典的交流电机理论与传统的控制系统分析中已不能完全适应。因此,仿真软件Matlab/Simulink以其操作简单、建模灵活、准确度较高等特点深受广大研究者的青睐。
2三相异步电机的数学模型
研究异步电机的模型时,做如下假设:三相绕组为对称绕组,其产生的磁动势沿气隙圆周呈正弦分布;忽略磁路的饱和,各绕组的自感、互感是恒定的;忽略铁芯损耗;不考虑绕组电阻受频率、温度变化的影响[1]。
2.1三相异步电机的非线性数学模型
三相定子的电压方程为:
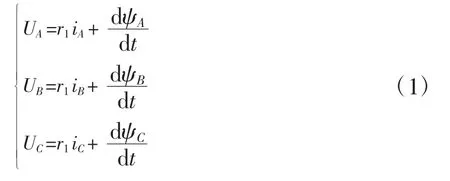
式中,UA、UB、UC为定子三相电压;iA、iB、iC为定子三相电流;ψA、ψB、ψC为定子三相绕组磁链;r1为定子各相绕组电阻。
三相转子绕组上电压折算到定子侧后的电压方程为:
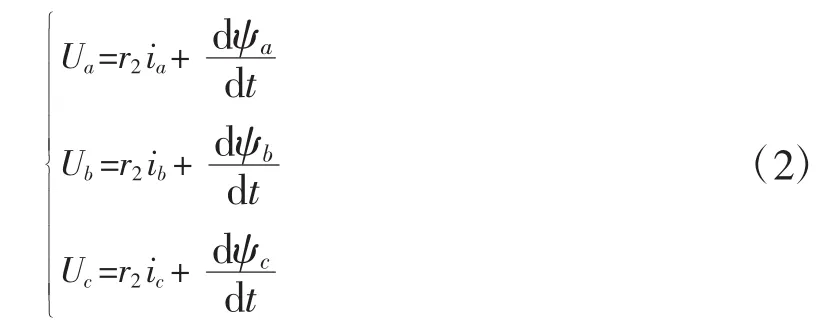
式中,Ua、Ub、Uc为转子三相电压;ia、ib、ic为转子三相电流;ψa、ψb、ψc为转子三相绕组磁链;r2为转子各相绕组电阻[4]。
电磁转矩方程为:

式中,np为电机极对数,θ为角位移。
运动方程为:

式中,Te为电磁转矩;Tl为负载转矩;ω为电机机械角速度;J为转动惯量。
2.2三相坐标与两相坐标的变换
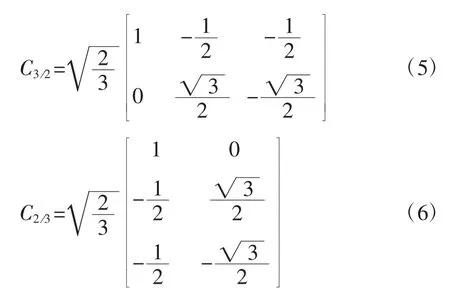
将三相静止绕组A、B、C与两相静止绕组α、β之间进行变换,即变量从静止的abc坐标系向静止的αβ坐标系的变换或逆变换。令C3/2为从三相坐标系变换到两相坐标系的变换矩阵,令C2/3为两相坐标系变换到三相坐标系的变换矩阵,则有:
2.3三相异步电机的数学模型
采用在αβ0坐标系下建立的异步电动机数学模型,其电压方程式为:
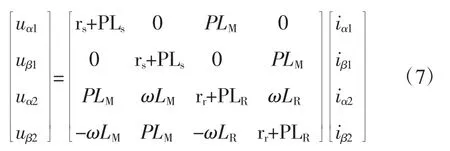
式中,uα1为定子α绕组电压;uβ1为定子β绕组电压;uα2为转子α绕组电压;uβ2为转子β绕组电压;iα1为定子α绕组电流;iβ1为定子β绕组电流;iα2为转子α绕组电流;iβ2为转子β绕组电流 ;Ls表示定子绕组全电感;LR表示转子绕组的全电感;LM为定、转子绕组之间的互感;P为微分算子。
异步电动机电磁转矩方程为:

式中np为极对数,运动方程为:

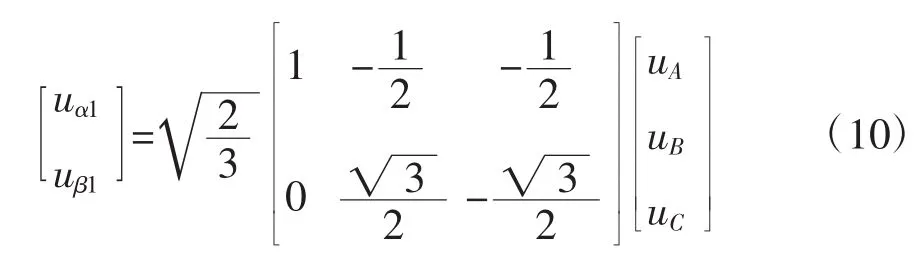
由式(8)和以异步电动机旋转的角速度ω为状态变量的式(9)为异步电动机在αβ坐标系下的动态仿真模型,而对于在αβ坐标系中其电压uα,uβ通过静止坐标变换可得到,如式(10)所示:
3 Simulink仿真模型的建立
3.1电机模型
由已建立的数学模型,在Matlab/Simulink中建立三相异步电机的仿真模型。电机模型是由定子模型、转子模型、磁链模型及转矩模型4个模块组成的[2]。按照数学模型要求正确连接各模块,可得三相异步电机的合成模型,如图1所示。
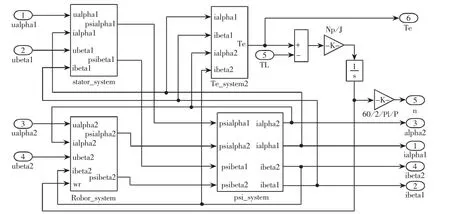
图1三相异步电机合成模型图
3.2坐标变换模型
由于电机模块的输入是在αβ系统下,而电机的定子电压通常都是基于abc系统下的电压,因此建立起动仿真运行模型时,需要一个abc系统与αβ系统的坐标变换模块,即3/2变换模块,模块如图2所示。
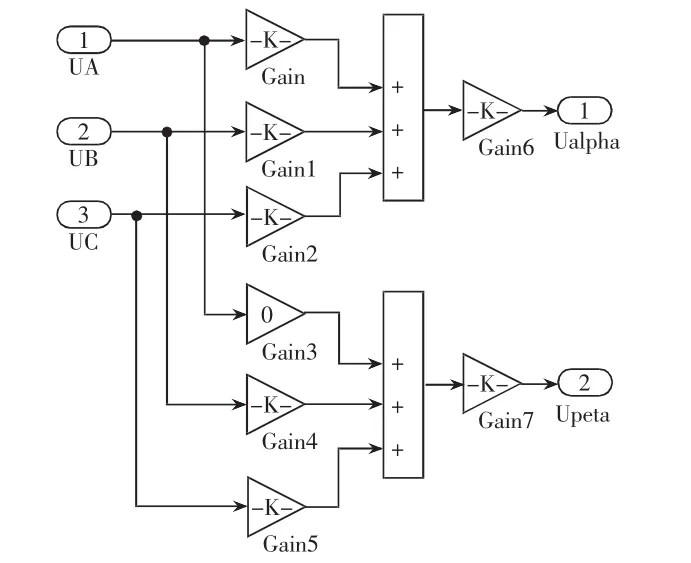
图2 3/2变换模块图
由于电机模块的输出电流是αβ系统下的电机电流,若要观察基于abc系统下的定、转子电流,需在建立启动仿真运行模型时,建立一个αβ系统与abc系统的坐标变换模块,即两个2/3变换模块,模块如图3所示。
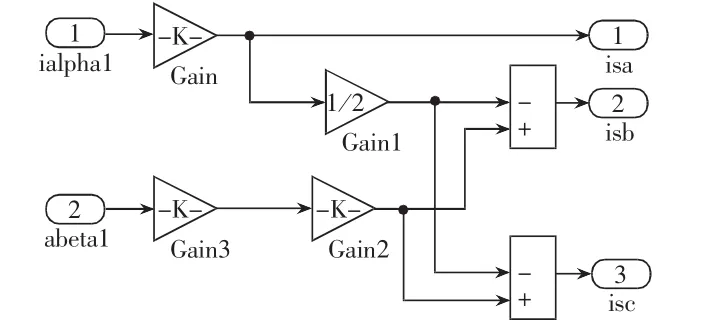
图3 2/3变换模块图
3.3基于电机模块的起动仿真运行模型
在已建立的电机模块与坐标变换模块的基础上,加正弦交流信号、示波器等模块,来构成启动仿真运行模型[3],模型图如图4所示。
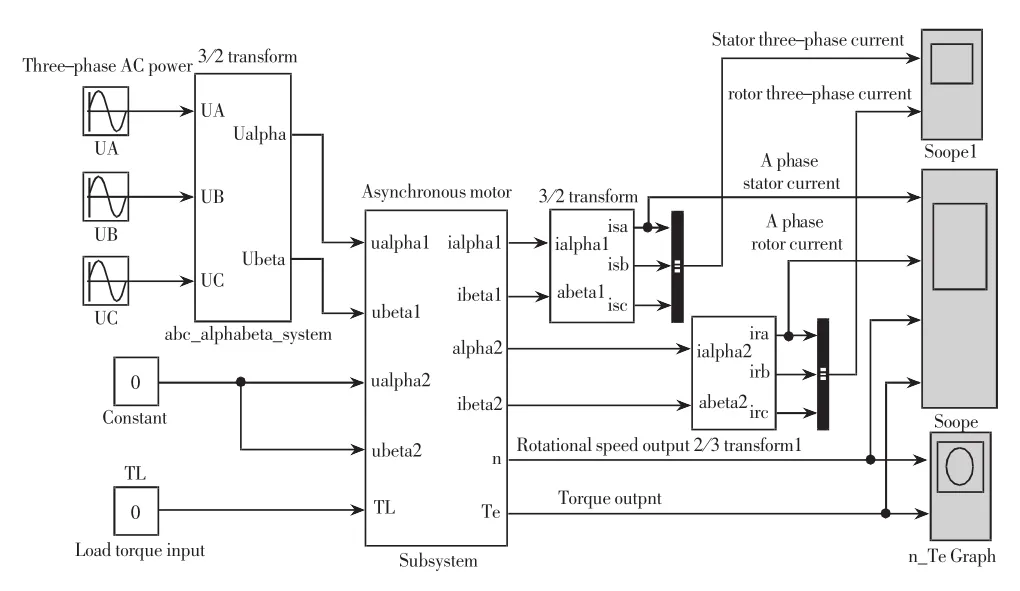
图4三相异步电机启动仿真运行模型
4仿真结果及其分析
4.1理想空载启动仿真
将负载转矩输入设定为0,三相异步电杨启动仿真运行仿真模型如图4所示,可以得到电机的转矩-转速曲线如图5所示。定子电流、转子电流、转速、转矩变化规律曲线如图6所示。定转子三相电流变化规律如图7所示。
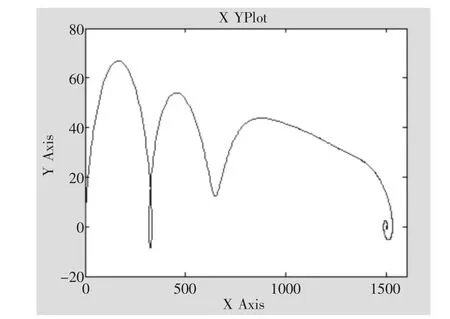
图5三相异步电机理想空载启动过程转矩-转速曲线
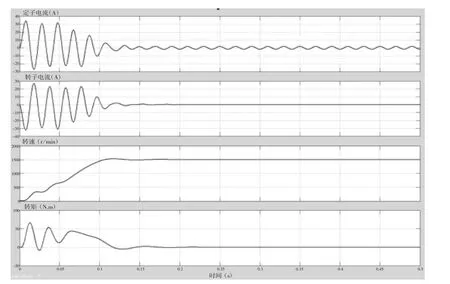
图6三相异步电机理想空载启动过程定子电流、转子电流、转速、转矩变化规律
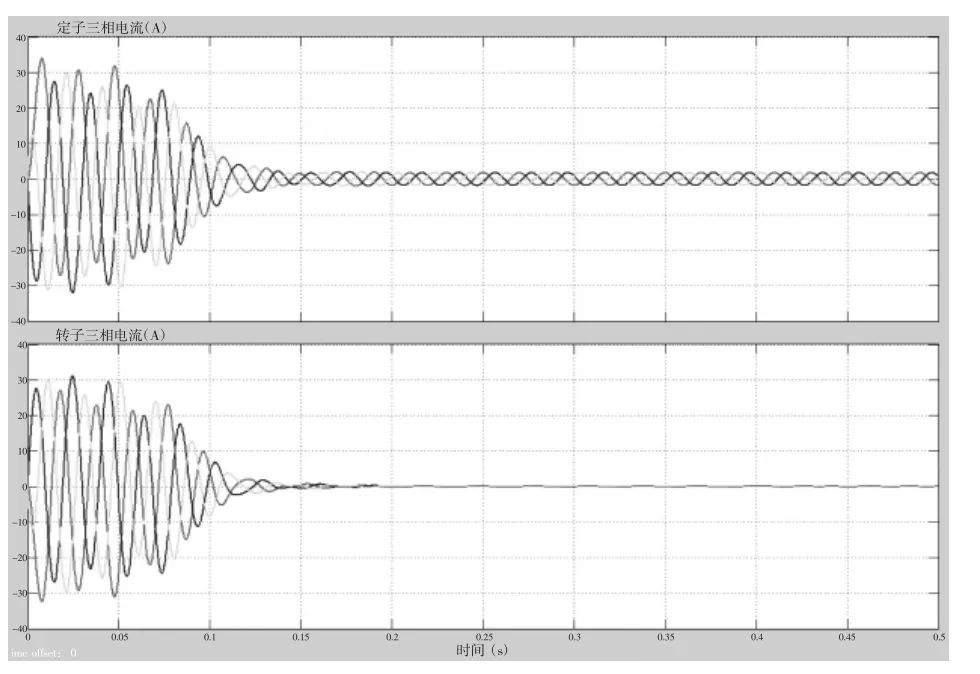
图7三相异步电机理想空载启动过程定、转子三相电流变化规律
4.2满载起动仿真
将负载转矩输入设定为额定转矩(TL=8.84N·m),运行图4所示的仿真模型,可以得到三相异步电机满载启动过程的转矩-转速曲线,如图8所示。定子电流、转子电流、转速、转矩变化规律曲线如图9所示。定转子三相电流变化规律如图10所示。
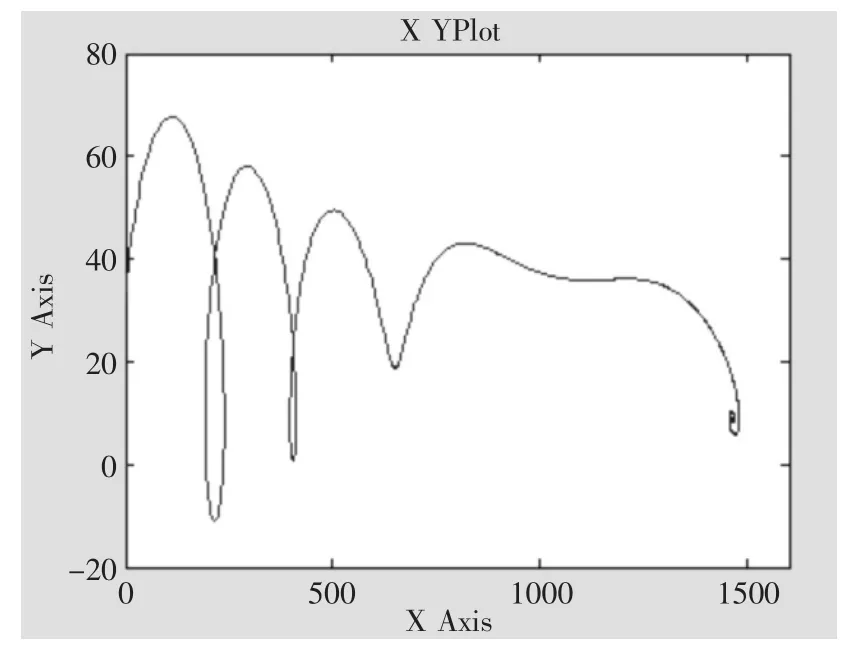
图8三相异步电机满载启动过程转矩-转速曲线
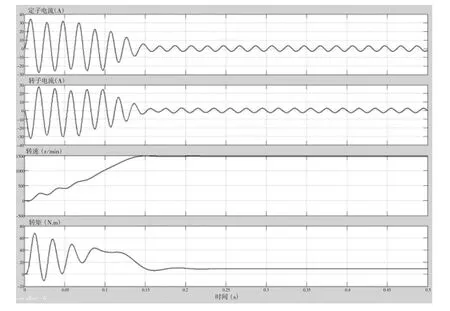
图9三相异步电机满载启动过程定子电流、转子电流、转速、转矩变化规律
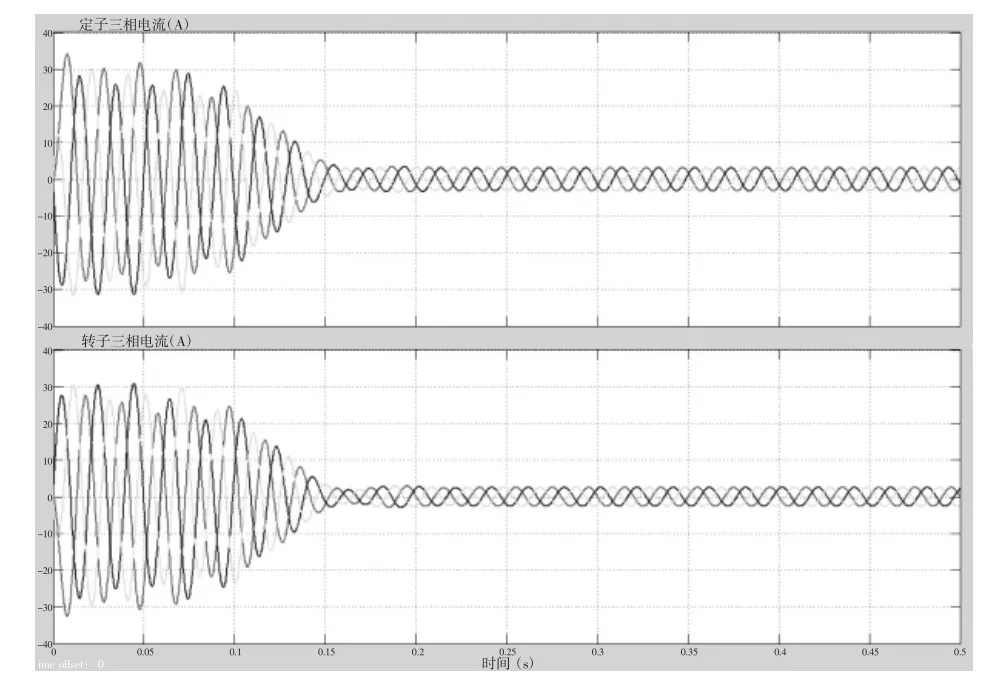
图10三相异步电机满载启动过程定、转子三相电流变化规律
从图中可知,几个被测量都相应地发生了变化,启过程在0.15s结束。电机转矩在初始启动阶段呈现强烈振荡,完全启动后转矩为8.84 N·m,这是因为负载转矩为8.84 N·m,转速为1465r/min。定子和转子电流波形表明电机在启动时电流很大,这与实际情况相符。完全启动后,转子电流为2.6A;定子电流为3.2A。
5结论
本文详细地介绍了基于Matlab/Simulink软件下,建立三相异步电动机仿真模型的过程。仿真结果表明,用Simulink进行电动机仿真能够方便、高效地得到结果[5],且所得结果也能直观地反应实际。
[1]张崇巍,李汉强.运动控制系统[M].武汉:武汉理工大学出版社,2002.
[2]薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出社,2002.
[3]陈 靖.基于Matlab/SimuLink的交流电机建模与仿真[J].兵工自动化,2003,22(2).
[4]魏昌洲.基于DSP的交流变频调速系统研究[D].南京:南京航空航天大学,2005.
[5]张志涌.精通MATLAB[M].北京:北京航空航天大学出版社,2000.
Research and simulation of three phase asynchronous motor based on Simulink
ZHONG Da-qing1,RAO Ding1,SUN Huan-huan2
(1.China Electronics System Engineering No.2 Construction Co.,Ltd.,Wuxi 214000,China;2.School of Hydraulic,Energy and Power Engineering,Yangzhou University,Yangzhou 225127,China)
The dynamic mathematical model of asynchronous motor is a high-order,strong-coupling,nonlinear and multivariable system,it runs in the non-sinusoidal power supply frequency conversion device,which makes the traditional analysis method difficult to adapt to such a complex system.In order to simplify the research method for the motor,the three-phase induction motor model is established.The dynamic mathematical model under αβ0 coordinate is derived by using the coordinate transformation principle.Through the Simulink of the Matlab software,the mathematical model of the motor is established.The research and simulations on the startup process of the motor under the ideal no-load and full-load conditions are presented.The simulation results show that the Simulink software can simulate the motor efficiently and accurately.
coordinate transformation;Simulink simulation;no-load starting;full-load starting
TM343+.2
A
饶 顶(1991-),男,江苏徐州人,本科,助理工程师,主要从事电气设计方面的研究。
2016-07-11
1005—7277(2016)04—0014—04
国家自然科学基金(51207135);江苏省自然科学基金(BK2012266);扬州大学研究生培养创新工程基金资助项目(CXLX_1416)
仲大庆(1985-),男,江苏南通人,本科,助理工程师,从事方向:电气设计方面的研究。
孙欢欢(1991-),女,江苏宿迁人,硕士研究生,研究方向为新型特种电机。
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
电子制作(2019年23期)2019-02-23
应用能源技术(2019年1期)2019-01-30
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
云南电力技术(2015年2期)2015-08-23
