
基于VSG的分布式电源控制研究*
2016-06-01 11:35顾永超张延迟杨宏坤董贺贺
电气传动自动化 2016年4期
顾永超,张延迟,杨宏坤,查 燚,董贺贺
(1.上海电机学院,上海200000;2.上海电气风电集团,上海200000)
基于VSG的分布式电源控制研究*
顾永超1,张延迟1,杨宏坤2,查 燚1,董贺贺1
(1.上海电机学院,上海200000;2.上海电气风电集团,上海200000)
近年来对于分布式电源中逆变器的研究表明,传统电流控制型逆变器具有诸多缺点,例如缺乏惯量以及电压保持和频率支撑能力。提出了一些新的控制方法,如下垂控制和虚拟同步发电机(VSG)控制等。在上述两种控制方法中,都是通过下垂特性控制有功功率和无功功率,它们之间唯一的区别是VSG控制具有下垂控制所不具备的虚拟惯量。研究了两种控制方式的动态特性,建立了一个小信号模型对负荷变化期间的频率暂态响应进行比较。通过对两种控制方式的频率响应进行比较,提出了一种基于VSG的孤岛微网协调控制策略。最后通过仿真验证了该策略在孤岛运行方式下的稳定性。
微网;逆变器控制;新能源;储能
1 引言
为了解决能源危机和环境污染问题,通过利用诸如太阳能、风能等可再生能源的分布式发电在近数十年间得到了长足发展。这些分布式电源通常由一个直流母线和两个变流器组成,即一个输出变流器和一个并网变流器。虽然输出变流器会因为新能源资源和技术等原因而采用不同的控制方式,但是并网变流器通常都是可以通过一定控制方式控制的DC/AC逆变器。分布式电源中逆变器的传统控制方式是电流控制方式,这种控制方式通常用一个锁相环来将逆变器和电网进行同步,并通过控制输出电流来输出电网预先要求逆变器发出的有功功率和无功功率。这种控制方式有两个主要的缺点:①采用这种控制方式的分布式电源不具备类似同步机的电压保持和频率支撑能力,因此它们不能在孤岛模式下运行;②由于不像传统同步发电机那样具备转动惯量,因此采用这种控制方式的逆变器在电网中的渗透率受到一定程度的限制。为此,最先在不间断电源系统(UPS)中提出的一种VSG控制方式[1-4],能够使分布式电源的逆变器具备电压保持、频率支撑以及功率分配的能力。近些年因其在UPS系统和微网中的不断应用,它逐渐吸引起了人们的注意。本文先在理论上对比分析了下垂控制和VSG控制,建立了两种控制方式的时域模型和小信号模型,通过仿真对比了两种控制方式在频率暂态响应方面的差异,验证了VSG小信号模型的有效性,进一步提出了一种基于VSG的微网协调控制策略,并通过了实验仿真验证。
2 VSG和下垂控制原理
为了满足不同的要求,下垂控制出现了一些不同的改进类型。在线路阻抗可以忽略且电感等效为纯电阻的低压网络中,新提出的P—V下垂控制取代了传统的P—ω下垂控制[4],这种控制方式具有更加理想的功率分配能力和更高的稳定性。一种基于虚拟f—V框架的控制方法,能够适用于任何线路阻抗比的逆变器控制。在微网中,下垂控制通常在分层控制中扮演一个底层的基本控制,第二层控制往往负责使频率和电压保持额定值,第三层控制则负责将分布式电源和电网进行同步以及它们在并网模式下的潮流控制和优化运行。第二层和第三层控制需要从中央控制器获得通信指令,现多通过无线通信来解决通信指令的传输问题,如在参考文献[5]中为了获得精确的功率分配而提出的方案,以及在参考文献[6]中为了减小频率和电压偏差而提出的方案。此外,实践证明,优化下垂系数[7]和补充下垂控制回路[8]可以帮助提高系统的稳定性。
然而,采用下垂控制的分布式电源依旧不能为电力系统提供惯量支撑。因此,VSG控制方案[9、10]近年来被推出,其因加入了同步发电机中的摇摆方程而具有惯量功能。通过对能量进行相应的控制,VSG控制策略利用直流链路中存储的能量作为进行一次调频旋转的备用容量,以此来实现虚拟惯量的功能。近年来,分布式电源中已开发出了一些VSG控制方案。在这些方案中,通常需要考虑完整的同步发电机模型,这就使得算法变得更为复杂,同时也对处理器的处理能力提出了更高的要求。在参考文献[9]、[10]中提出了一种简单的模型,这种模型只需要同步发电机中的一些必要元素,例如摇摆方程,并且通过运用迭代算法求解摇摆方程就可以直接得到转子的频率。
在这篇文章中,为了便于理解两种控制方式的区别,分别建立了两种控制方式的时域模型和小信号模型,对VSG控制和下垂控制的暂态特性进行了比较。最终根据VSG的虚拟惯量特性,提出了一种在微网孤岛运行方式下的协调控制策略。应该指出的是,尽管本文研究中用到的是在参考文献[9]、[10]中提出的VSG数学模型,但用其他类型的VSG数学模型建立的小信号模型同样能够验证结果的有效性。此外,本文中出现的小信号模型是分析VSG控制和下垂控制动态特性的一般方法,通过小信号模型可以计算出VSG在各种参数和负荷变化期间频率暂态响应的理论值,并进行分析和比较,这对未来同类课题的研究来说是一种比较有用的方法。
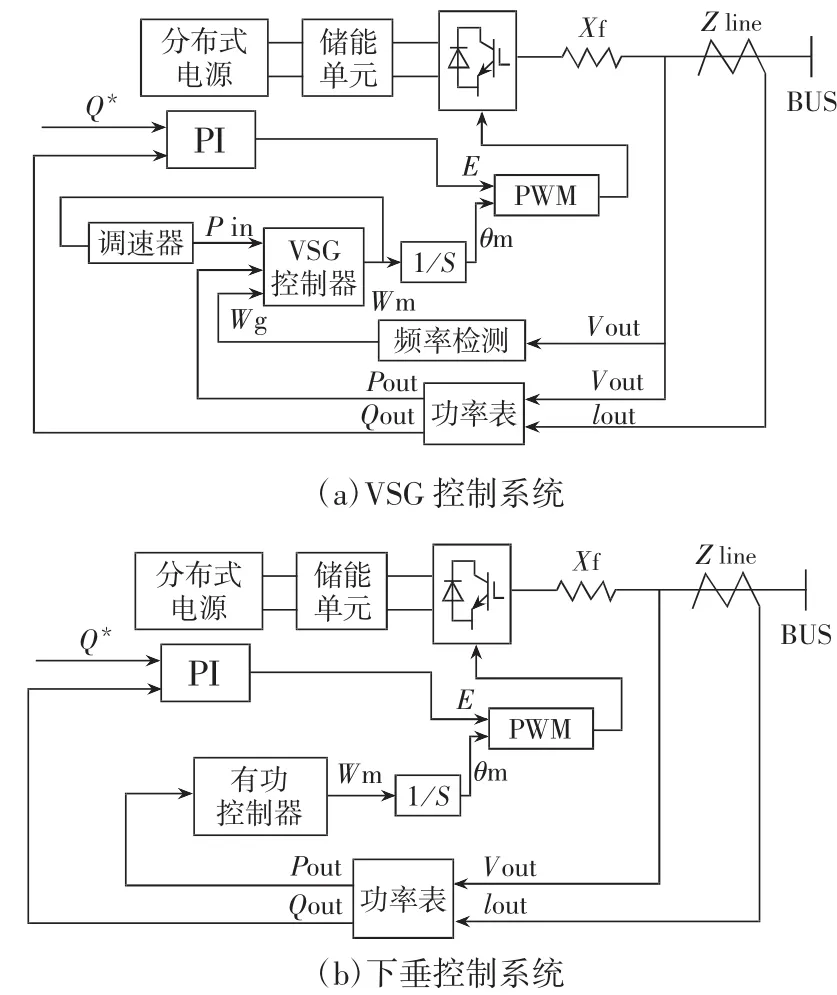
图1 VSG控制系统控制原理示意图
图1中所示为根据文献[9、10]中提出的VSG数学模型所搭建的VSG控制系统控制原理示意图,看上去有点类似于下垂控制。两种控制方法中的无功功率控制是相同的,因此在本文中仅仅研究两种控制方式中有功功率控制的差异。
在图1中,“VSG控制”模块中的摇摆方程可以表示为:

其中:Pin为调速器中输出的虚拟轴功率,Pout为实际测量到的输出功率,J是虚拟惯量,D是虚拟阻尼因子,ωm是虚拟转子角频率,ωg是电压传感器安装处的角频率。在本文中,VSG的虚拟极对数设定为1。
图1中的调速器模块是ω-P下垂控制器,用公式可以表示为:

这里P0是有功功率的设定值,ω0是标准角频率值,kP是下垂系数。
通过式(1)和式(2)消除Pin,则可得到:

在文献[11]中,ωg是一个用来提供同步频率以计算阻尼功率值的测量值,在本文中用一个常量代替,如标准频率ω0,因此,阻尼因子D便与下垂系数kP相等,这样在一个简单模型中就可以省略调速器模块。然而在这种情况下,由于没有阻尼效应,将可能导致在仿真中产生更大的输出功率震荡。
在图1(b)下垂控制系统中,有功控制模块中的关系式为:

当J=0,D=0时,式(3)就等于式(4),换言之,在惯量和阻尼因子都被设置为0时,下垂控制可以被看做为VSG控制的一种特殊形式。
3频率的暂态响应比较
对单机系统的分布式电源建立VSG控制和下垂控制的小信号模型和时域仿真模型,基于这两个模型,计算在一个负荷变化过程中的频率阶跃响应,并对相应的仿真结果进行比较分析。理论上,频率变化缓慢的系统是较理想的系统,因为df/dt较小意味着系统具有较大的惯量。在惯量较小的系统中,当负荷变化较大时,就很容易使df/dt超过继电器阈值,从而引起不必要的跳闸和甩荷动作。文献[11]表明在具有较大惯量的系统中发生瞬时故障时,二次调频会在负荷变化期间动作,因此系统只需承受一个较小的最大频率偏移值。

图2单机系统控制示意图
3.1小信号模型
如图2所示为一个单机系统示意图,其中DG到负荷之间的电缆阻抗,通常在高压网络中在忽略电阻后被认为是呈感性的;在低压网络中在提供一个感性的虚拟阻抗后也可以等效成这种情况[12]。通过计算潮流,可以推出式(5)。

式中:下标“dg”是与DG相关的参数,且Xdg=Xf+ Xline,是DG输出的总电抗;Δδdg=(Δωm_dg-Δωbus)/s,ωbus是母线频率;Kdg=(EdgVbuscosδdg)/Xdg是DG的同步功率系数。所以,式(5)可变为:

从而式(3)的小信号模型可以写为:

由于其相对于标准频率的偏差值相对较小,所以ωm_dgSΔωm_dg≈ω0SΔωm_dg。此外,二阶扰动项可以被忽略,因此式(7)可变为:

如果再忽略线路损耗,则ΔPout_dg=ΔPload,这里Pload是负荷消耗的有功功率;如果Xf≫Xline,并且Δωg_dg≈Δωbus时,通过式(6)和式(8)消除 Δωg_dg和Δωbus,便可得到:

式(9)是单机系统在VSG控制方式下发生小负荷波动时频率变化的传递函数。如果让Jdg=0、Ddg=0的话,那么就可以得到基于DG的下垂控制传递函数

若式(9)中的S=0,那么式(9)就等于式(10),这也暗示了式(9)中的稳态增益由下垂控制系数kP_dg决定,并且与摇摆方程的参数没有关系。换言之,在稳态情况下,如果下垂控制系数被设定为相同的值,那么VSG控制和下垂控制就是等效的。
3.2仿真验证
通过式(9)和式(10)可以很容易计算出在各种参数下经历一个小负荷波动所引起的DG频率变化阶跃响应的理论值。图3所示为J0=10kg·m2、D*=25时,根据上述图2中电路搭建的Matlab/Simulink仿真模型。图4为通过改变VSG控制器中的J值所得到的一组仿真波形,其中时域在仿真开始的0.2秒时负荷增加2kW,以此来理解VSG的虚拟惯量特性。图4(a)、(b)的左边为时域仿真波形图,右边为小信号仿真波形图。图4(c)为同种参数下的下垂控制仿真波形图。从仿真波形图中可以看出,在所有情况下,时域仿真波形基本上与小信号仿真波形一致,这证明小信号模型是有效的。
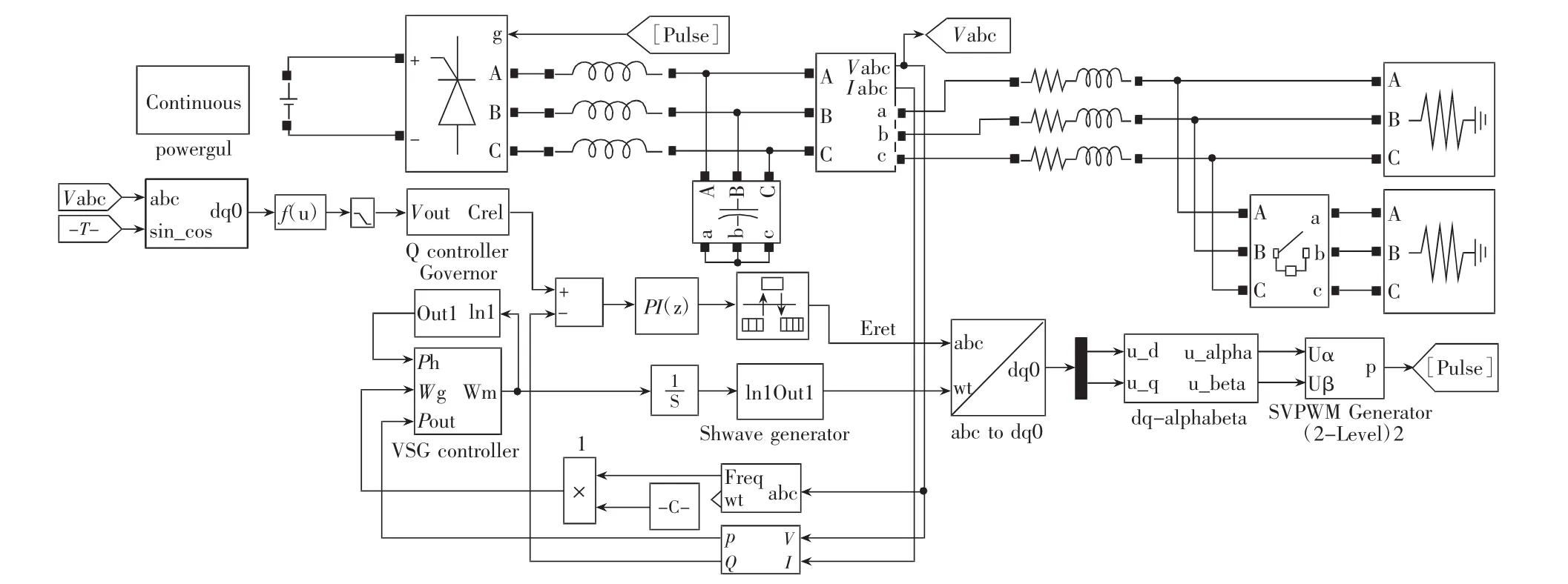
图3单机模式下VSG控制模型
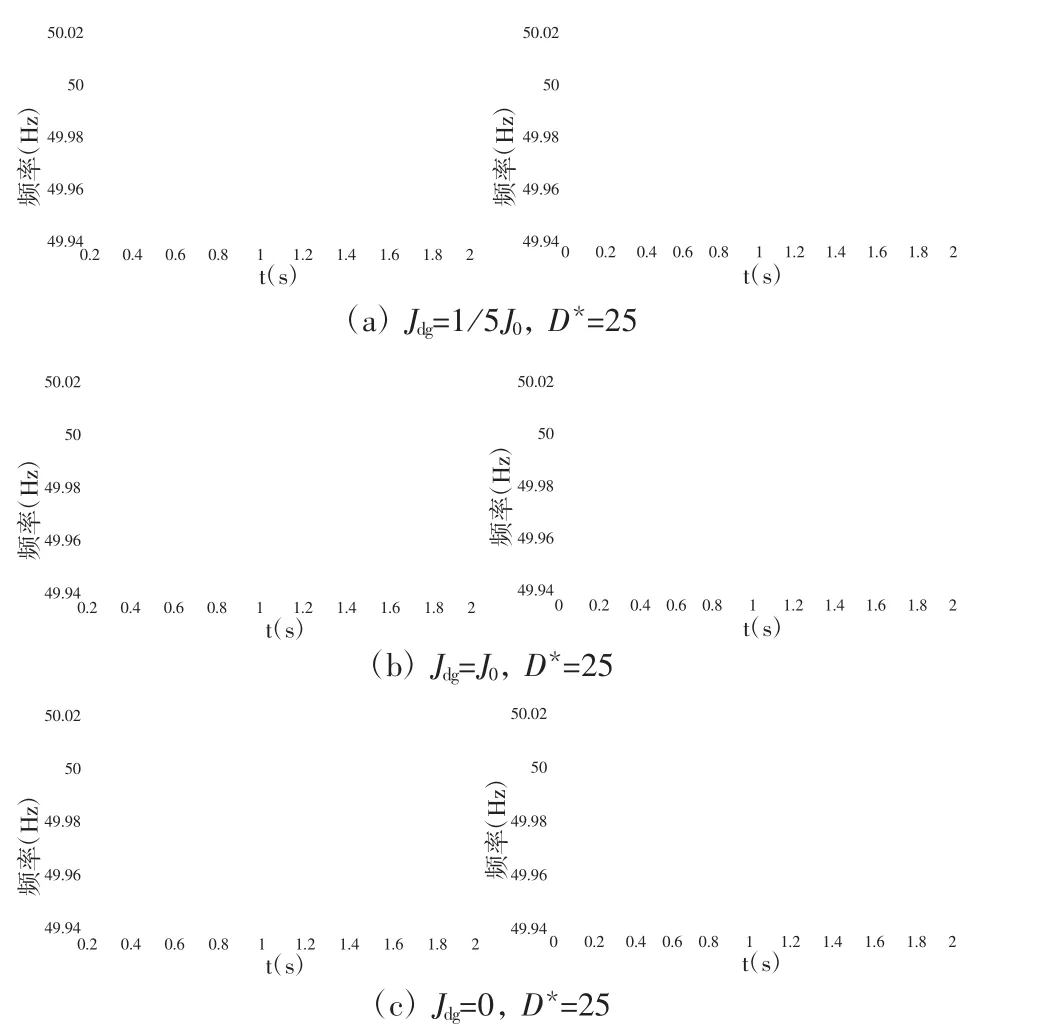
图4负荷变化期间VSG控制和下垂控制在各种参数下的仿真波形
通过对比两种控制方式在各种情况下的波形图发现,VSG控制的频率变化缓慢,而同种情况下下垂控制的频率则发生了一个近乎阶跃的变化。出现这种差异就是因为VSG模拟出了类似于同步发电机惯量的虚拟惯量,从而具备了一定的频率支撑能力,而下垂控制则不具备。此外Jdg的值越大频率响应变化得越缓慢,这表明VSG惯量的大小由Jdg的值决定。
4基于VSG的微网协调控制策略
基于上述VSG控制的分布式电源所具有的频率响应特性,提出一种针对孤岛微网的分布式电源协调控制策略——VSG-PQ控制。微网中通常存在各种分布式电源,如风力发电机、光伏阵列、微型燃气轮机以及各种储能装置,这些分布式电源往往具有各不相同的运行特性,所以不论是在并网还是孤岛运行情况下,为了保证母线处的电压和频率保持在额定范围内,都要对分布式电源进行协调控制。本文所提出的协调控制策略属于主从控制,对风力发电机、光伏阵列等采用PQ控制,使其作为主控单元,而对微型燃气轮机、储能装置等采用VSG控制并使其作为从控单元。从控单元需要根据主控单元的运行情况来调整自身的运行状态,从而给微网提供电压和频率支撑。本文构造了一个简单的微网模型模拟微网孤岛运行模式,以验证VSG控制的逆变器的频率支撑作用,其电路模型如图5所示。

图5基于VSG的微网协调控制电路模型
系统中对容量为20kW的分布式电源采用PQ控制,使其稳定输出有功20kW,无功输出为0;对容量为15kW的分布式电源采用VSG控制(Jdg=J0,D*=25),以维持系统中的频率稳定。仿真模型模拟微网系统在开始稳定运行之后的0.5s增加一个瞬时的5kW的功率波动(见图6(b)),以观察系统的频率变化。此外,本文在同样的电路参数下,对15kW容量的分布式电源进行了下垂控制,以便于比较分析。
仿真波形如图6所示。其中,PQ控制的分布式电源输出稳定的有功和无功(见图6(a));在系统负荷发生一个瞬时功率波动之后(见图6(b)),容量为15kW的分布式电源采用VSG控制的微网系统的频率几乎未发生波动(见图6(c)左),而容量为15kW的分布式电源采用下垂控制的微网系统的频率则出现了一个大幅值的震荡过程(见图6(c)右)。这表明本文所提出的微网控制策略的频率支撑作用是有效的。

图6协调控制策略仿真波形
5结束语
微网是新能源发电研究的重要方向,也是未来智能电网的重要组成部分。对微网中逆变器的控制显得很重要,良好的控制策略应该能保证微网系统中频率、电压和功率的平衡。本文中提出的简单的VSG模型通过加入同步发电机的摇摆方程,模拟出类似于同步发电机惯量的虚拟惯量,这种虚拟惯量使得微网系统具备了类似于同步发电机的一次调频功能,从而使微网运行更加稳定可靠。此外,本文提出的小信号模型通过仿真验证了它的有效性。这种模型对于理解虚拟惯量以及今后对VSG的研究很有帮助,也是一个比较有用的工具,本文最后也通过仿真验证了所提出的孤岛微网协调控制策略的有效性。
[1]张 兴,朱德斌,徐海珍.分布式发电中的虚拟同步发电机技术[J].电源学报,2012,(3):1-7.
[2]苏建徽,汪长亮.基于虚拟同步发电机的微电网逆变器[J].电工电能新技术,2010,29(3):26-29.
[3]郑天文,陈来军,陈天一,梅生伟.虚拟同步发电机技术及展望[J].电力系统自动化,2015,39(21):165-175.
[4]M.C.Chandorkar,D.M.Divan,R.Adapa.Control of parallel connected inverters in standalone ac supply systems[J].IEEE Trans.Ind.Appl.,1993,29(1):136-143.
[5]J.He,Y.W.Li,J.M.Guerrero,F.Blaabjerg,J.C.Vasquez.An islanding microgrid power sharing approach using enhanced virtual impedance control scheme[J].IEEE Trans.on Power Electron.,2013,28(11):5272-5282.
[6]J.Hu,J.Zhu,D.G.Dorrell,J.M.Guerrero.Virtual flux droop method-A new control strategy of inverters in microgrids[J].IEEETrans.onPowerElectron,2014,29(9):4704-4711.
[7]I.-Y.Chung,W.Liu,D.A.Cartes,E.G.J.Collins,S.-I.Moon.Control methods of inverter-interfaced distributed generators in a microgrid system[J].IEEE Trans.on Ind.Appl.,2010,46(3):1078-1088.
[8]R.Majumder,B.Chaudhuri,A.Ghosh,R.Majumder,G.Ledwich,F.Zare.Improvement of stability and load sharing in an autonomous microgrid using supplementary droop controlloop[J].IEEETrans.on Power System,2010,25(2): 796-808.
[9]M.P.N.Van Wesenbeeck,S.W.H.De Haan,P.Varela,K.Visscher.Grid tied converter with virtual kinetic storage[A].Proc.IEEE Powertech Conf[C].2009,1-7.
[10]T.Shintai,Y.Miura,T.Ise.Oscillation damping of a distributed generator using a virtual synchronous generator[J].IEEE Trans.on Power Del,2014,29(2):668-676.
[11]M.Guan,W.Pan,J.Zhang,Q.Hao,J.Cheng,X.Zheng.Synchronous generator emulation control strategy for voltage source converter(VSC)stations[J].IEEE Trans.on Power System,2015,30(6):3093-3101.
[12]J.M.Guerrero,L.Garc,De Vicuna,J.Matas,M.Castilla,J.Miret.Output impedance design of parallel-connected UPS inverters with wireless load-sharing control[J].IEEE Trans.on Ind.Electron,2005,52(4):1126-1135.
Research on control of distributed generators based on VSG
GU Yong-chao1,ZHANG Yan-chi1,YANG Hong-kun2,ZHA Yi1,DONG He-he1
(1.Shanghai Dianji University,Shanghai 200000,China;2.Shanghai Electric Wind Power Group,Shanghai 200000,China)
In recent years,the research of inverter based on distributed power supply shows that the traditional current control inverter has many disadvantages,such as lack of inertia,no voltage holding capability,no frequency supporting capability.Therefore,the new control methods of the droop control and the virtual synchronous generator(VSG)control are proposed.In the above two control methods,they all use the droop characteristics to control the active power and the reactive power,and the only difference between them is that the VSG control has the virtual inertia which is not possessed by the droop control method.The dynamic characteristics of the two control methods are presented.A small signal model is established to analyze and compare the transient response of the frequency while the load changing.By comparing the frequency response of the two control methods,A coordination control strategy of isolated microgrid based on VSG is proposed,and finally,it is simulated and verified that the stability of the proposed strategy in the isolated island operation mode.
microgrid;inverter control;renewable energy;energy storage
TM762
A
顾永超(1991-),男,现为上海电机学院在读研究生。
2016-05-24
1005—7277(2016)04—0008—06
国家自然科学基金项目(51277119);上海市教育委员会科研创新项目(10YZ217)
张延迟(1967-),男,副教授,博士,主要研究方向为并网型风力发电机和电力系统仿真。
猜你喜欢
现代电力(2022年2期)2022-05-23
能源工程(2021年3期)2021-08-05
山东冶金(2019年3期)2019-07-10
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
电子制作(2019年11期)2019-07-04
消费导刊(2018年10期)2018-08-20
中国惯性技术学报(2018年1期)2018-05-10
山东工业技术(2016年15期)2016-12-01
通信电源技术(2016年6期)2016-04-20
