人体肌电信号采集识别系统设计
2016-05-30 09:13李大鹏张百云史捷
科技创新导报 2016年14期
关键词:数据采集
李大鹏 张百云 史捷
摘 要:表面肌电信号(Surface Electromyography, SEMG)是一种复杂的伴随肌肉活动的电生理信号。设计采集系统对上臂肌肉的表面肌电信号进行多路采集,进行信号处理及计算分析,研究上臂运动动作与表面肌电信号特征之间的联系。设计了肌电信号动作识别系统,在PC机上对信号进行显示、处理、运算,在下位机显示识别结果,控制电机做相应动作。实验验证可以识别上臂屈伸动作,并做出相应的电机控制动作。
关键词:表面肌电信号 数据采集 识别系统
中图分类号:TP212.1 文献标识码:A 文章编号:1674-098X(2016)05(b)-0068-02
表面肌电信号可以通过表面电极收集到,以避免创伤和感染。表面肌电信号是一种随机信号,频带为10~1000 Hz,而能量主要集中在50~350 Hz,由于被测对象是有生命的系统,在测量方式上受到限制,因此对测量仪器提出了许多苛刻的要求。
研究简单易用的表面肌电信号采集识别系统,对康复医疗、运动检测、情感识别等应用具有帮助意义。
1 采集系统设计
1.1 电极
电极采用Ag-AgCl心电监护电极,屏蔽导联线,是一种不可极化电极,可以将人体内的离子电流转换为导线中电子电流。
1.2 前置放大器设计
生理前置放大电路的第一级基于INA128构成,两个电极连接到放大器的差动输入端,参考电极接地,增益可调。
1.3 滤波器设计
为消除干扰和噪声的不利影响,需要根据肌电信号的频率成分选择适当的频带。文章滤波电路采用RC有源滤波器,包括带通滤波器和双T带阻滤波器。高通滤波器的截止频率为20 Hz,是为了减少由于皮肤和电极之间移动伪差(motion artifact)产生的低频干扰;低通滤波器(LPF)的截止频率为650 Hz。
1.4 数据采集卡及LabView界面的设计
选用基于采集卡与Labview及PC机构成的采集系统。在LabView中使用DAQ助手。设置通道1并采集模擬数据中的电压值,采集用N采样并采集10 000个数据,显示相应波形。
1.5 下位机设计
下位机基于51单片机设计,包括与PC机的串口通讯,电机控制及LCD显示。程序设计要注意显示模块耗时较长,步进电机模块耗时较短,所以在主程序中不能把显示模块和步进电机模块放在同一个循环中。
2 肌电信号的信号处理
肌电信号的时域分析如下。
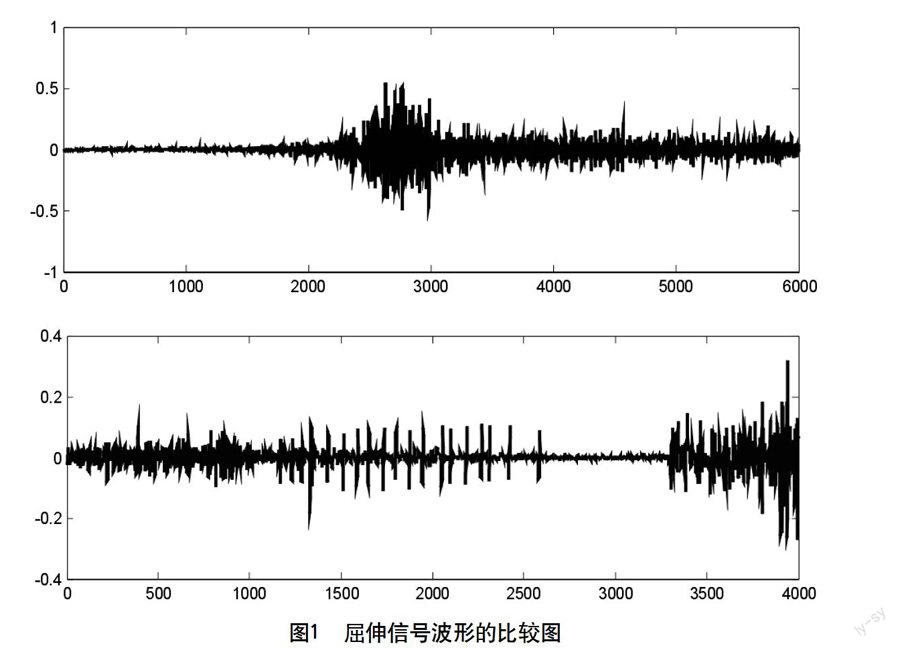
对原始数据采用Matlab对其进行了显示来比较屈伸原始信号幅值的差别。屈伸信号波形幅值比较如图1所示。从中可以看出对于屈伸不同动作,肌电信号幅值不同,变化规律也有所不同。
标准差:标准差是方差的算术平方根。标准差能反映一个数据集的离散程度。
积分肌电值IEMG:积分肌电值就是对所有信号取绝对值后积分,然后求均值,可用于提取肌电信号的特征。
均方根RMS:均方根就是一组数据的平方和除以数据的个数再开方,可以滤除信号中的噪声,使滤波后的信号更平滑、更明显。
经过比较研究者发现,屈伸信号的均值、标准差、方差均差别不大,但积分肌电值、均方根有效值有显著差别。故选用了积分肌电值作为阈值的获取标准。
3 采集识别实验
为了验证表面肌电信号采集电路的性能,文章设计了一组人体上肢表面肌电信号的采集识别实验。
通过阈值比较在下位机上实现了屈伸动作的识别,通过上位机GUI实现了肌电信号的采集、储存,并对肌电信号进行了时域和频域的处理,通过比较幅相特性曲线、功率谱、倒谱等。得出屈伸动作下相应图像差别不是太大,不能直观地看出明显的区别。
通过对肌电信号时域分析,得到了相关肌电信号的特征参数,经过比较得到在屈伸动作下积分肌电值的差别较大,适合作为阈值选取的标准。通过对不同人、屈伸时手臂的不同的地方进行多组采集,经过Matlab处理后,比较得到了合适的阈值。实验中实现了屈伸动作识别并把识别结果显示在LCD上、通过阈值比较来控制步进电机正反转、蜂鸣器的报警等功能。
4 结语
文章设计的系统利用采集设备对上臂肌肉做特定动作的表面肌电信号进行多路采集,通过对微弱的肌电信号进行处理及计算分析,研究上臂运动动作与表面肌电信号特征之间的联系。设计了肌电信号动作识别系统,在PC机上对信号进行显示、处理、运算,用下位机显示识别结果,控制电机作相应动作。实验验证可以识别上臂屈伸动作,并做出相应电机控制动作,该系统可以用在医疗诊断,康复医学和假肢仿生控制中。
参考文献
[1] 李大鹏.表面肌电信号用于假肢控制的研究[D].天津大学,2002.
[2] 李醒飞,李大鹏,张国雄,等.肌电信号控制仿生手的研究[J].中国机械工程,2005,17(5):488-492.
猜你喜欢
现代电子技术(2016年22期)2016-12-26
现代电子技术(2016年22期)2016-12-26
中国新通信(2016年16期)2016-10-18