
北斗中长基线静态解算算法实现及结果分析
2016-05-30 16:36应俊俊张京奎
科技资讯 2016年17期
关键词:北斗
应俊俊 张京奎
摘 要:该文对北斗中长基线静态基线解算的算法模型进行了介绍,基于北斗双频观测数据,对站间小高差和站间大高差中长基线的解算精度进行了测试和分析。实测结果表明:站间小高差基线各时段解算精度均优于平面1 cm+1 ppm,高程2 cm+2 ppm;站间大高差基线绝大部分时段解算精度均优于平面1 cm+1 ppm,高程2 cm+2 ppm,在解算时段长度为4 h时,解算精度优于平面1 cm+1 ppm,高程2 cm+2 ppm的时段比例高于95%。
关键词:北斗 中长基线 静态基线解算 站间高差 时段长度
中图分类号:P228.4 文献标识码:A 文章编号:1672-3791(2016)06(b)-0143-03
静态基线解算在大地控制网布设和控制点加密中具有重要应用,主流GNSS数据处理软件有Trimble的TBC、Leica的LGO、Novatel的WayPoint、中海达的HGO等。虽然北斗静态基线解算原理与GPS类似,但由于北斗星座设计的特点,站星几何图形变化较慢,载波相位观测量间具有很强的相关性,造成方程严重病态,北斗系统在基线解算的理论研究和应用方面正在展开,相关的实验分析还需要进行大量的工作。
对于中长基线而言,电离层、对流层等误差的空间相关性减弱,导致双差残余的电离层、对流层等误差较大,以致影响浮点模糊度的精度,增大模糊度固定难度。为了得到正确的模糊度整数值,中长基线情况下需要考虑电离层延迟误差和对流层延迟误差的影响。通常,电离层延迟采用双频消电离层组合进行消除,对流层延迟通过干延迟改正和湿延迟参数估计的综合处理进行消除。其中,对流层延迟与站间高差关系密切,一般而言,站间高差越大,对流层延迟的影响越显著。
该文着重对北斗中长基线静态解算中的算法模型进行阐述,对站间大高差和小高差解算结果进行分析,文中所有数据均采用自研的北斗静态基线解算软件进行数据处理。
1 中长基线静态解算的算法实现
静态基线解算通过对载波进行双差组合(首先在站r和站b间进行单差,再基于卫星间进行双差),此时接收机钟差已消除,则其双差观测方程为:
(1)
(2)
其中:和分别为双差载波(测相伪距,单位为m)和码组合观测量;为伪距观测量的双差值;为相应频点的波长;为双差模糊度;为电离层延迟误差;为对流层延迟误差;和分别为载波和码残余误差(观测噪声和未模型化误差)。
在进行解算时,对流层延迟通过干延迟GPT/GMF改正和湿延迟参数估计进行消除,电离层延迟采用双频消电离层组合进行消除。中长基线静态解算主要基于上述公式,具体做法为:基于长时间观测数据,首先使用宽巷载波双差数据列立观测方程,求解出宽巷模糊度;其次将宽巷模糊度代入消电离层组合观测方程中,估计模糊度浮点解和坐标(隐含在中);再次通过搜索方法对模糊度浮点解进行取整;最后将模糊度整数解代入到上述方程中,得到精确的基线坐标。
2 基线精度测试
为了获得较全面的基线精度统计结果,分别选取不同长度、不同站间高差基线进行测试,数据情况及测试结果如下所述。
2.1 站间小高差基线测试结果
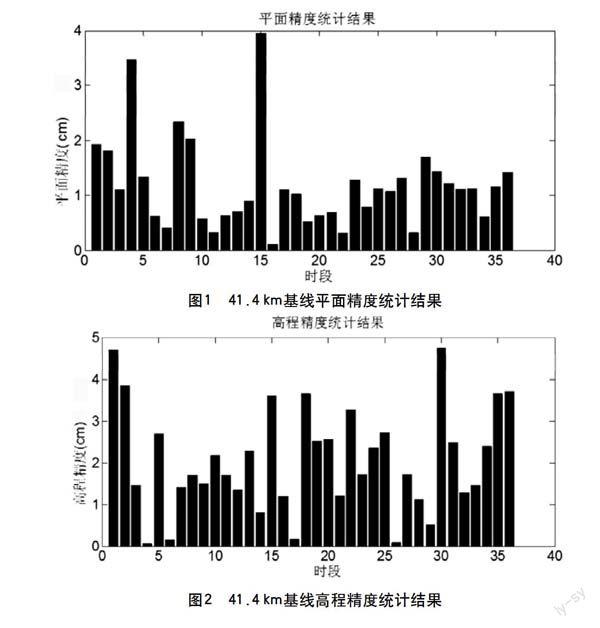
中长基线站间小高差测试以2014年1月华北地区某次测试为例,基线长为41.4 km,站间高差为37 m,A、B、C这3种型号在B1、B2双频接收机均进行了48 h测试,解算模式为双频消电离层模式,高度角为15°,4 h为一个时段,模糊度搜索方法为Lambda方法,Ratio阈值为2.5,对流层处理方式为对流层干延迟改正、湿延迟估计。以LGO软件长时间观测、分时段解算的GPS基线结果为真值,平面精度统计结果如图1所示,高程精度统计结果如图2所示。其中,1~12时段为A型接收机测试结果,13~24时段为B型接收机测试结果,25~36时段为C型接收机测试结果。
从图1、图2可看出,解算的各时段平面精度均优于1 cm+1 ppm,高程精度优于2 cm+2 ppm;平面精度总体优于高程精度;3种型号接收机解算结果存在一定的差异,尤其表现在平面精度。此种现象的存在,可能与接收机内部噪声水平和稳定性相关。
2.2 站间大高差基线测试结果
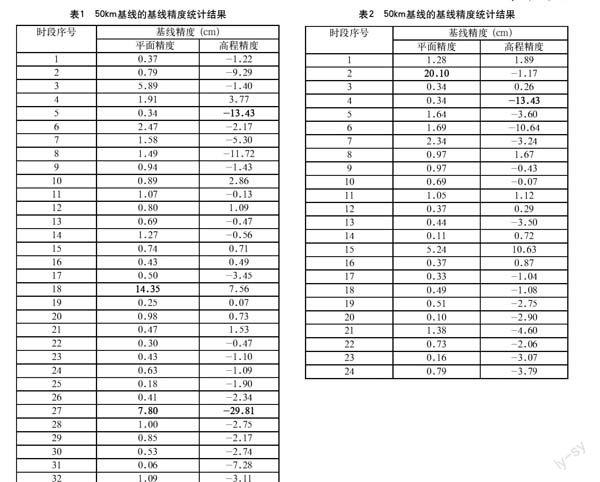
为对大高差数据进行测试,从香港CORS站下载HKWS、HKNP两站2015年8月26日、2015年11月25日、2016年2月24日、2016年6月1日共4天96 h测试数据分别进行解算。HKWS、HKNP两站基线长为49.89 km,站间高差为286.88 m。解算频点为北斗B1、B2双频、电离层为双频消电离层模式,高度角为15°,采样间隔为30 s,模糊度搜索方法为Lambda方法,Ratio阈值为2.5,分别以2 h、3 h、4 h为一个时段进行处理。以香港地政总署网站给出的2016年4月1日CORS站坐标为真值进行精度评估,时段长度为3 h的基线精度统计结果如表1所示,时段长度为4 h的基线精度统计结果如表2所示,表3为不同时段长度基线精度超限百分比统计结果。
为便于对精度结果进行对比统计,平面精度以1 cm+1 ppm、高程精度以2 cm+2 ppm为限值,对于HKWS、HKNP两站近50 km基线,平面精度限值为6 cm,高程精度限值为12 cm。表1、表2中以黑色加粗字体标识的即为平面精度超过6 cm、高程精度超过12 cm的精度数据。表3为以此限值为基准的平面精度和高程精度超限百分比统计结果。
从表1、表2可看出,除少数超限时段外,其他解算时段的平面精度均优于1 cm+1 ppm,高程精度优于2 cm+2 ppm;平面精度总体优于高程精度。从表3可看出,随时间增加,平面精度和高程精度超限百分比逐渐下降,在时段长度为4 h时,平面精度和高程精度达标百分比均高于95%。
3 结语
该文对北斗中长基线静态解算的算法模型进行了介绍,对不同长度、不同站间高差的基线进行了测试和分析。结果表明:站间小高差基线各时段解算精度均优于平面1 cm+1 ppm,高程2 cm+2 ppm。站间大高差基线在时段长度为4 h时,平面精度优于1 cm+1 ppm,高程精度优于2 cm+2 ppm的比例高于95%。
参考文献
[1] 王胜利,王庆,聂文锋,等.北斗系统高轨卫星高精度定位模型病态性分析及改进方法[J].导航定位学报,2013,1(3):31-32.
[2] 邱晓璐,刘根友,段鹏硕,等.GPS/BD载波相位定位病态性对比分析[J].测绘科学,2015,40(7):24-28.
[3] 元荣.BDS/GPS基线算法研究及软件开发[D].北京:清华大学,2014.
[4] 张明,刘晖,范城城.基于对流层加权法的网络RTK快速初始化研究[J].测绘地理信息,2015,40(6):19-21.
猜你喜欢
军事文摘(2023年4期)2023-04-05
小哥白尼(神奇星球)(2022年3期)2022-06-06
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
当代陕西(2019年18期)2019-10-17
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
电子制作(2016年15期)2017-01-15
太空探索(2016年12期)2016-07-18
太空探索(2016年3期)2016-07-12
太空探索(2016年7期)2016-07-10
太空探索(2016年7期)2016-07-10
