雷达目标跟踪的转换坐标卡尔曼滤波算法
2016-05-30 05:52张欣
中小企业管理与科技·下旬刊 2016年3期
张欣
摘 要:本文主要研究雷达目标跟踪的转换坐标卡尔曼滤波算法,通过深入分析利用卡尔曼滤波算法(CMKF)进行雷达目标跟踪,同时我们通过采取统计的方法来解决转换测量误差的问题,从而有效的促进卡尔曼滤波算法的精准性。笔者认为采用仿真的方法和卡尔曼滤波算法(EKF)才能够顺利的完成雷达目标跟踪,这对于当前计算发展意义重大。
关键词:转换坐标;卡尔曼滤波算法;雷达目标跟踪
我们在研究雷达目标跟踪过程中可以发现,要将雷达目标跟踪的问题解决好,是一个非常值得我们关注的环节。对于如何进行科学化的跟踪,还需要不断地进行分析研究,找到一些具体的方法才是关键的任务所在。当我们通过滤波处理后形成一种新的运行轨迹时,就会发现雷达的性能好坏直接影响到我们所要进行科学化跟踪的效果,通常情况下,雷达的具体跟踪效果主要来自其自身性能的高低。因为雷达主要的任务在于通过跟踪环节工作来达到人们所预期的目标。对于雷达跟踪的收敛速度而言,主要在于經过一系列的滤波精度来进行实际的操作,从而形成一种科学化的跟踪模式。我们通过大量的研究目标跟踪的转换坐标卡尔曼滤波算法,可以逐渐掌握一些先进的技术,从而为整个雷达跟踪发展起到积极的推动作用。
1 雷达信号检测与目标跟踪
我们进行研究的雷达信号检测,主要在于利用它可以迅速地掌握一些目标的情况,随时将目标进行科学化的监测。这样做主要在于经过一系列的目标跟踪后,我们可以将具体的目标给予科学化的监视,从而保障其跟踪任务的完成。这种雷达信号检测和目标跟踪是有一定的联系的,主要在于通过雷达的检测可以为目标跟踪提供科学化的信息,从而避免出现一些假目标的误导。这对于雷达目标跟踪的转换坐标卡尔曼滤波算法也会起到积极作用。
2 卡尔曼滤波在雷达跟踪上的具体应用
2.1 研究题目 假设有一个二坐标雷达对一平面上运动目标的进行观察,目标在t=0~400s沿y轴作恒速直线运功,运动速度为-15m/s,目标的起点为(2000m,10000m),雷达扫描周期为2秒,x和y独立地进行观察,观察噪声的标准差均为100m。试建立雷达对目标的跟踪算法,并进行仿真分析,给出仿真结果,画出目标真实轨迹、对目标的观察和滤波曲线。
2.2 算法研究 考虑利用卡尔曼滤波算法对目标的运动状态进行估计。由于目标在二维平面内做匀速运动,因此这里只考虑匀速运动情况。
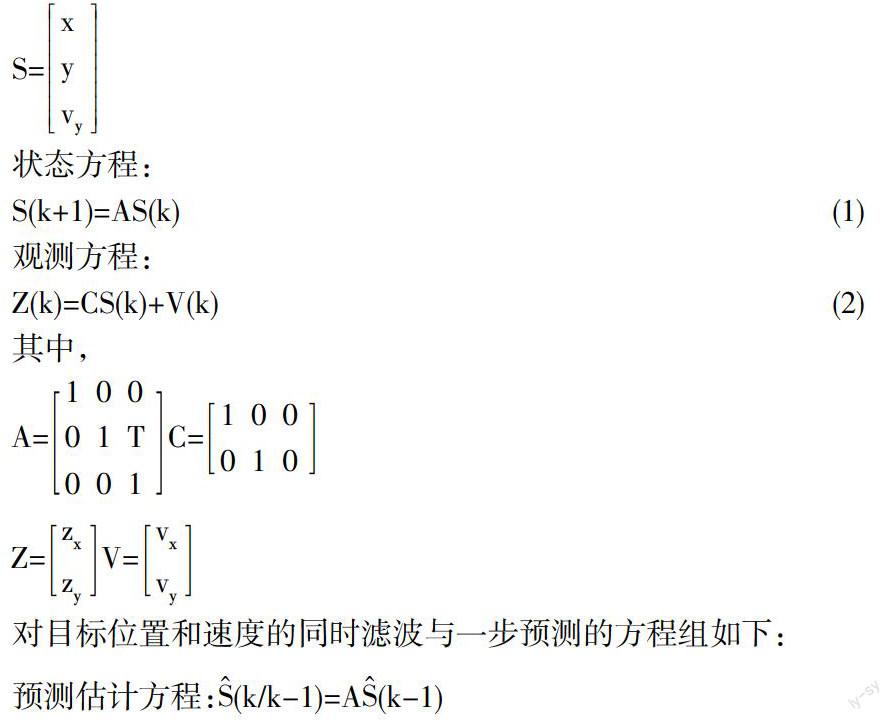
2.2.1 跟踪算法 由于目标沿y轴做匀速直线运动,取状态变量
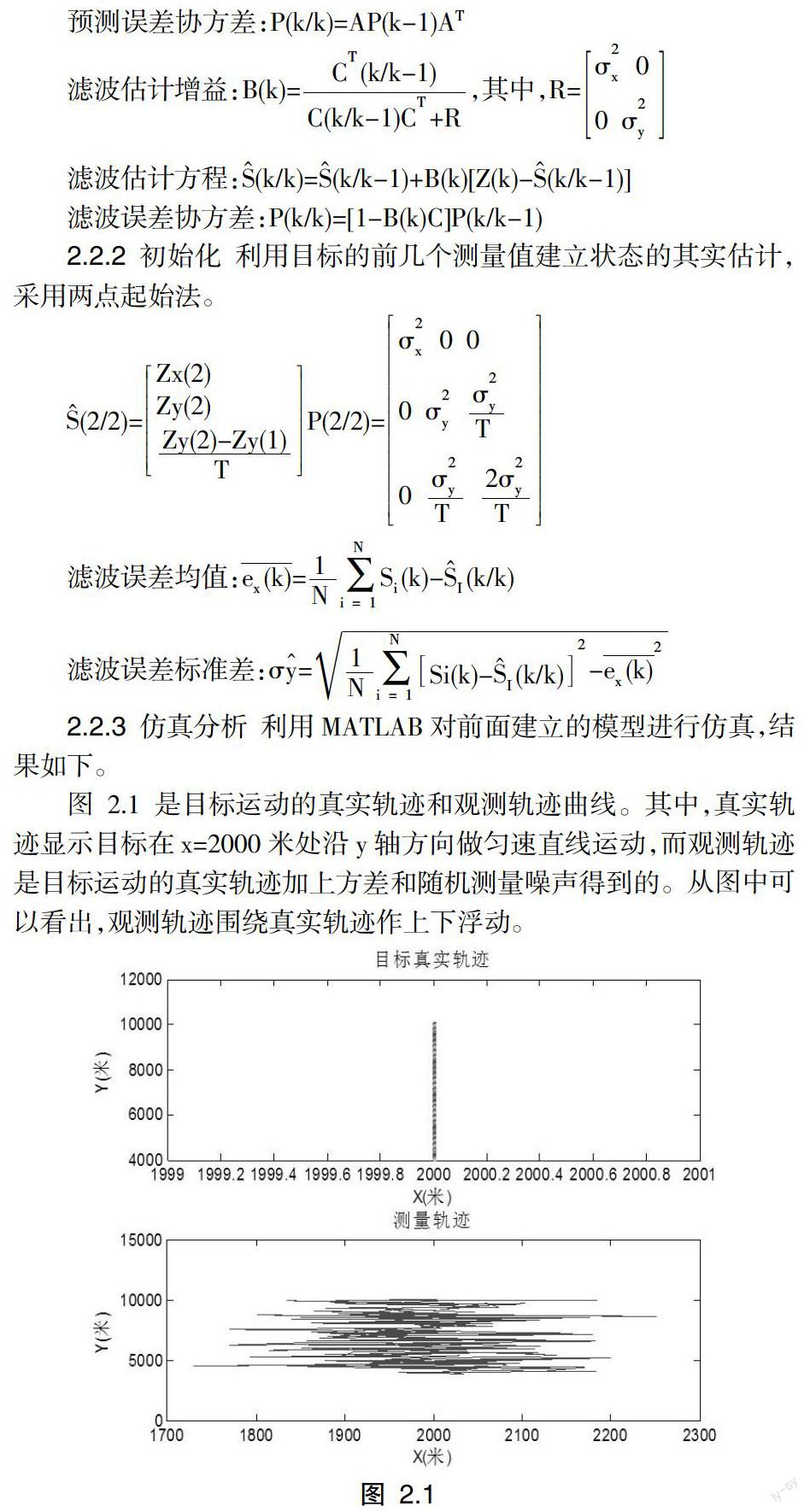
2.2.3 仿真分析 利用MATLAB对前面建立的模型进行仿真,结果如下。
图 2.1 是目标运动的真实轨迹和观测轨迹曲线。其中,真实轨迹显示目标在x=2000米处沿y轴方向做匀速直线运动,而观测轨迹是目标运动的真实轨迹加上方差和随机测量噪声得到的。从图中可以看出,观测轨迹围绕真实轨迹作上下浮动。
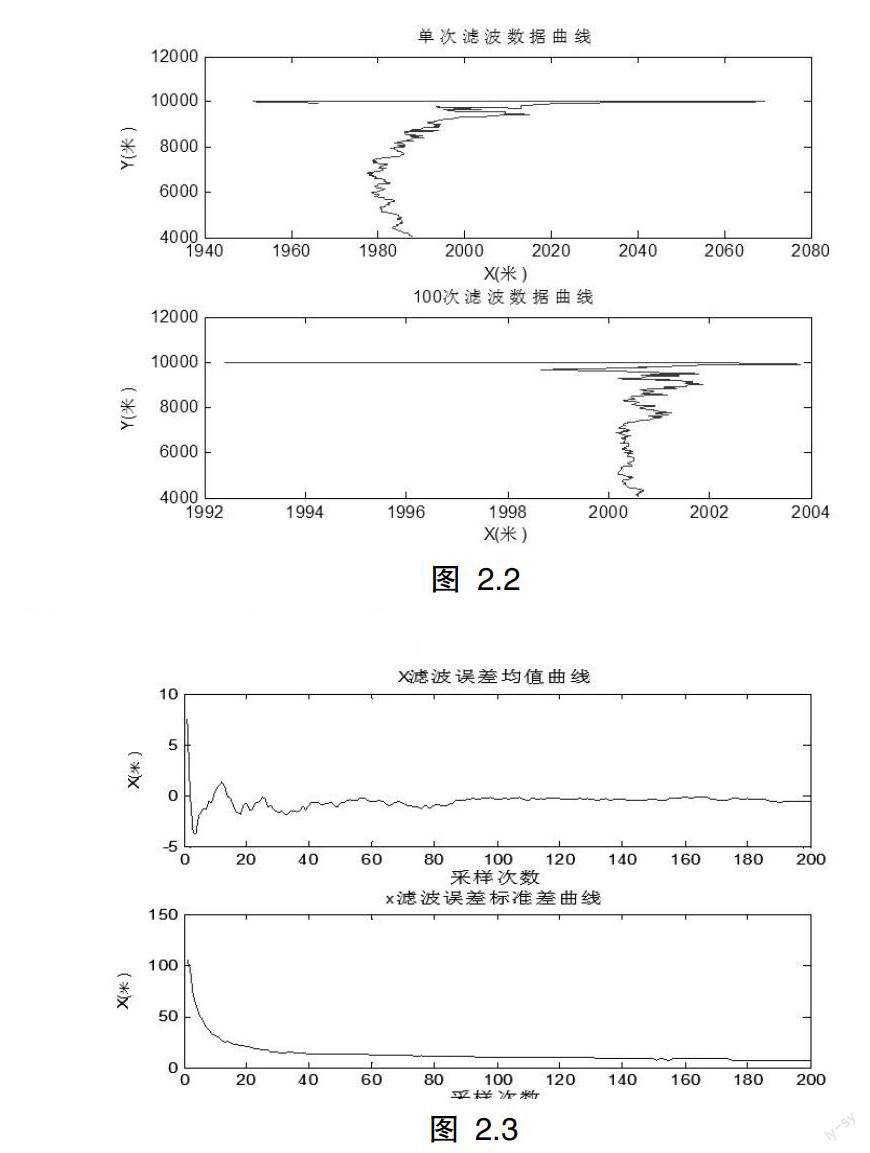
图2.2是单次滤波和100次滤波后的数据曲线。从图中可以看出,滤波刚开始时误差较大,之后滤波误差逐渐降低,估计值逐步逼近真实轨迹。而随着滤波次数增加,滤波后的结果更为接近真实轨迹。
图2.3、图2.4分别是x和y方向滤波估计误差均值及误差标准差曲线。从图上可以看出,滤波开始时误差较大,随着采样次数的增加,误差逐渐减小,误差的标准差也具有相同特性。另外,可以看到由于在y方向上有速度分量,因此y方向的估计误差均值比x方向的估计误差均值波动要大一些。
3 结束语
我们当前通过研究分析转换坐标卡尔曼滤波算法后,将其最佳的适应状态给予测算,从而形成一定的科学化发展规划,这是进一步研究的重点。本文主要根据实际研究的成果,通过对卡尔曼滤波器的研究,我们会逐步掌握一些科学的计算方法。这对于实际的转换测量而言意义重大。
参考文献:
[1]杨万海.多传感器数据融合及应用[M].西安电子科技大学出版社,2004.
[2]杨春玲.转换坐标卡尔曼滤波器的雷达目标跟踪[J].电子学报,1999,27(3):121-123.
[3]陈云峰,盛安东.标跟踪中非线性滤波[D].南京理工大学,2007.
[4]张婧,景占荣,羊彦.简化的UKF方法在多普勒雷达对目标跟踪中的应用[J].火力与指挥控制,2008(5):82-84.
[5]吴玲,卢发兴,刘忠.UKF算法及其在目标被动跟踪中的应用[J].系统工程与电子技术,2005(1):49-52.