基于Pro_E的压床机构运动学及动力学分析
2016-05-30 18:22苏旭锋廖建满张梁武
科技尚品 2016年7期
苏旭锋 廖建满 张梁武
摘 要:本文通过建立压床六杆机构的运动学及动力学数学模型进行分析,并基于Pro_E三维建模软件对其进行仿真分析,得出了压床六杆机构的位移、速度、加速度以及原动件的平衡转矩变化规律曲线。综合分析数学建模解析法所得结果与Pro_E仿真分析得出的曲线变化规律可知,软件仿真克服了解析法復杂的计算过程以及提高了对连杆机构分析的效率。该方法可为机构优化设计提供借鉴。
关键词:压床六杆机构;运动学分析;动力学分析;Pro_E
0 引言
压床是由六杆机构中的冲头向下运动来冲压机械零件的,它也是一种冲压机。从压床的结构上来看其执行机构主要是由连杆机构和凸轮机构组合而成,工作时电动机经联轴器带动齿轮转动而降低速度,而后带动凸轮转动,克服工作阻力而运动。对压床机构的运动学和动力学的分析直接影响到了压床冲头的工作质量和工作效率。对于连杆机构的分析有图解法和解析法。图解法既简单又形象易操作,但是精度低,效率低。解析法分析计算的精度高,但过程复杂、繁琐且效率低。随着计算机技术的发展,对于工程实际问题的分析我们可以利用计算机来辅助分析,不仅克服了图解法和解析法效率低而繁琐的缺点,而且使机构分析更加精确和高效化。因此本文先利用解析法建立压床机构的运动学和动力学数学模型,建立起理论基础,而后借助Pro_E建模软件对压床机构进行建模分析。从而得出并绘制了压床冲头的位移、速度、加速度及原动件的平衡力矩变化曲线图。
1 压床机构的解析法数学模型建立
1.1 压床机构运动学模型
1.1.1 位移分析
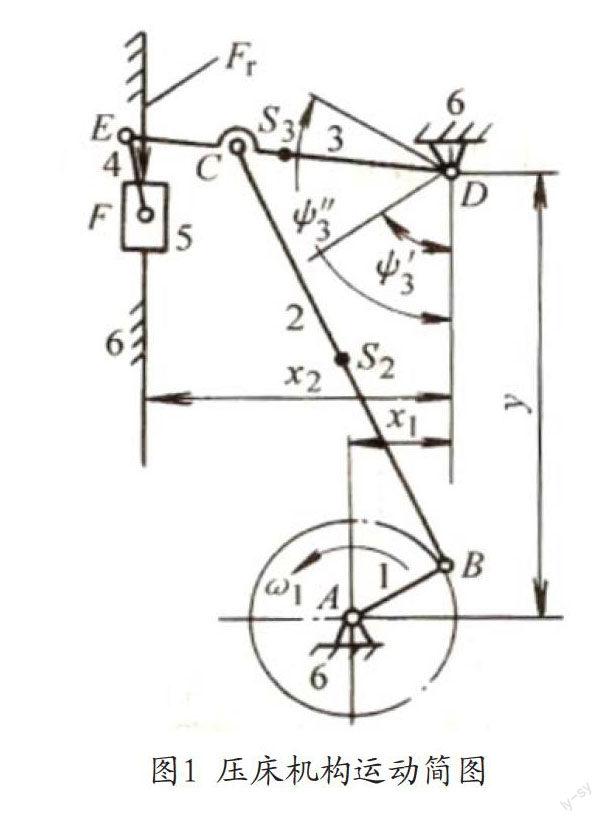
压床机构的运动简图如图1所示,运动分析所需参数由表1可得。图中各杆件长用li来表示,,lCD为CD的长度。h5为F点到A点水平面的垂直距离。各构件的矢量方位角为θi,。位移方程组如下:
(1)
1.1.2 速度分析
由(1)式对时间求导可得:
(2)
式(2)中,各构件的角速度为ωi,。构件5的线速度为。
1.1.3 加速度分析
由(2)式对时间求导,且由ω1为常数,因此可得:
式(3)中,各构件的角加速度为αi,。构件5的加速度为。
1.2 压床机构动力学模型
压床六杆机构中各运动副反力统一表示为,且将运动副反力用横坐标x方向上的分力和纵坐标y方向上的分力表示,即。在同一运动副中。构件上的力对其上某点的力矩方向与理论力学上规定的一致,逆时针为正,顺时针为负。以下对各个杆件分析并列出运动副反力和平衡力矩方程式。
对构件5分析有:
运用表2动力学分析参数,联立上述各式子可求出各运动副反力,进而求出原动件的平衡力矩。
2 基于Pro_E的分析及仿真的实现
根据已知的和已求得的运动学参数,运用Pro_E零件模块建立压床机构各杆件的三维零件模型。而后运用Pro_E组件模块将已建立的各杆件装配成完整的压床机构,根据动力学参数定义构件所需的初始条件。分别在“运动学”和“动态”下对机构进行仿真运行,从而得到滑块冲头的位移线图(图2)、速度线图(图3)和加速度线图以及原动件的平衡力矩线图。
3 结束语
由解析法和三维建模仿真分析法对压床六杆机构进行运动学和动力学分析的结果对比可知二者结果在误差允许范围内是相互符合的,但是从两种分析过程我们可以看出基于Pro_E的仿真分析提高了分析的效率和精度,节省了大量的时间和成本,而且所得出结果图像线图简洁明了,分析方便。该方法对于信息化时代的今天对机构的优化分析具有重大的借鉴意义。
参考文献
[1]孙桓,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2013.
[2]潘宇,陆凤仪,岳一领,等.基于MATLAB的压床机构运动学与动力学分析[J].科技创新与应用,2014,(6):23-24.
[3]王建平,张延辉,刘二辉.基于虚功原理和Pro/E的六杆机构仿真分析[J].河南理工大学学报:自然科学版,2014,33(3):309-312.