海南联网海底电缆综合检测水下定位方式研究
2016-05-28 03:18宫厚诚
科技与创新 2016年9期
宫厚诚


摘 要:海南联网海底电缆在运行过程中受到海流冲刷、船只抛锚等多种外界风险影响,因此需要对海缆进行综合检测。使用ROV搭载检测设备检测时,需要给ROV和探测设备提供精确的水下定位,以保证检测精度。主要分析了三种水下定位系统(长基线定位系统、短基线定位系统、超短基线系统)的原理、优缺点和适用性。由分析结果可知,使用超短基线定位系统能够满足海南联网综合检测水下精确定位的需求。
关键词:海底电缆;综合检测;水下定位;超短基线定位
中图分类号:P715.5 文献标识码:A DOI:10.15913/j.cnki.kjycx.2016.09.009
海南联网工程是我国第一个500 kV超高压、长距离、大容量的跨海电网工程。联网工程海缆部分北登录端为广东湛江徐闻南岭村,穿越琼州海峡到达南登录端海南澄迈林诗岛附近的玉包角,海底电缆长度约32 km/根,共3根,走廊宽度约2 km。海南联网工程提升了海南电网运行的可靠性和供电质量,海底电缆的稳定性和可靠性对海南社会经济的发展有着重要作用。
在海缆运行过程中,随着时间的推移和海流的作用,海缆覆盖层会受到冲刷,致使海缆裸露于海底,甚至在海底悬空;海缆附近的海洋作业会给海缆的正常运行带来极大的风险。因此,对海底电缆进行定期的综合检测显得非常有必要。其中,海缆埋深检测、抛石石坝状况及厚度检测、海缆铸铁套管状况检测是非常重要的内容。为了获取更加准确、详细的海缆现状细部资料,综合检测采用水下机器人搭载埋深探测设备(TSS系列)和录像设备的方式进行,检测过程中需要给ROV提供精确的定位信息,即需要进行较高精度的水下定位。
1 水下定位方法及原理分析
目前,水下导航定位技术以声学导航定位技术为基础,按照应答器基阵的基线长短划分为三种声学导航定位系统,分别是长基线定位系统、短基线定位系统和超短基线定位系统。
1.1 长基线定位系统
长基线定位是通过测量水下目标声源到各个基元的时间差,解算目标的方位和距离,最终得出目标精确的三维位置,为水下施工、调查等工作提供精确的定位服务。长基线定位系统一般包括三部分,即船舶上的数据处理系统、安装在定位目标或船舶上的声学收发器、布放在海底且由多个收发应答器组成的定位基阵。
采用3个以上的应答器对安装在测量船或水下机器人上的收发器进行定位,用(x,y,z)来表示水下机器人的三维坐标,用(xi,yi,zi)(i=1,2,3)来表示水下应答器的坐标Ti的坐标,Ri(i=1,2,3)为跟踪目标与水下应答器的距离。图1所示为长基线定位系统。
由收发器(水下机器人)和应答器的空间交会距离可以得出下式:
R22=(x-x2)2+(y-y2)2+(z-z2)2. (1)
求解方程组即可得到水下机器人的三维坐标。根据测量平差原理,在实际应用中,需接收4个以上海底应答器的信号,产生多余观测,从而满足最小二乘平差原理,提高测量精度。
1.2 短基线定位系统
短基线定位系统因基阵尺寸较小而得名,包括3个以上的基元构成,其基线长度一般超过10 m,通常工作在船底或布置在船舷上,利用声信号在基元与目标之间的传播时间差来计算,进而得到测量目标的方位和距离信息,推算出目标的坐标。
图2所示为短基线定位系统的配置。在图2中,H1,H2和H3为水听器,O为换能器(它也是船体空间直角坐标系的中心)。水听器成正交布设,Hl和H2之间的基线长度为b,指向船首,即X轴方向。H2和 H3之间的基线长度为by,平行于指向船右的Y轴,Z轴指向海底。设声线与三个坐标轴之间的夹角分别为θmx,θmy和θm z,而△t1、△t2分别为H1和H2以及H2和H3接收的声信号的时间差(图中仅以H1和H2为例)。
根据方位-距离法,由图3可直接得出目标物坐标的计算公式:
y=S·cosθm. (2)
1.3 超短基线定位系统
超短基线定位系统安装在一个收发器中,组成声基阵。精确测定声单元之间的距离,组成声基阵坐标系。在安装时,要精确测定声基阵坐标系与船体坐标系之间的关系,即需测定相对船体坐标系的位置偏差和声基阵的安装偏差角度(横摇角、纵摇角和水平旋转角)。系统通过测定声单元的相位差来确定换能器的方位(垂直和水平角度)。换能器与目标的距离通过测定声波传播的时间,再用声速剖面修正波束线来确定。
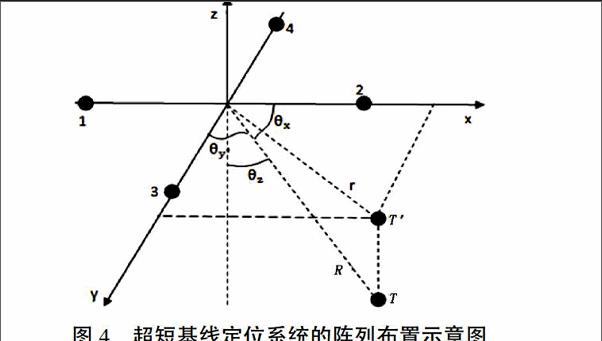
以4阵元组成的水听器基阵的超短基线定位系统为例,其阵列布置如图4所示。
图4中,标号1,2,3,4代表基阵的4个阵元,x轴为1至2方向,y轴为4至3方向,两轴相交于阵元中心,过阵元中心垂直向上为z轴方向。T为目标,与阵元中心的距离为R,阵元1,2间距和3,4间距相同,即阵元间距为d.T在坐标系中的方向角为θx,θy,θz,可通过阵元传播时延确定。
待测目标物各角度的方向余弦为:
. (3)
. (4)
方向角测定的基本公式为:
. (5)
式(5)中:φx为阵元间的相位差,由阵列测定。
由定位公式可得:
y=Rcosθy. (6)
其中,θx,θy,θz满足基本条件:cos2θx+cos2θy+cos2θz=1.
2 水下定位系统优缺点分析
通过分析三种水下定位系统的原理,结合各种定位系统的配套设备和安装校准方法,得出这三种水下定位系统的优缺点和适用性。
表1 三种水下定位系统的优缺点
系统 优点 缺点
长基线
定位系统 无需做大量的校准工作,在较大范围内可以达到较高的定位精度,作用距离较长,定位精度与水深无关 系统构成复杂、声基线阵庞大,费用较高,大量的水下或海底设备造成其布放、回收、使用和维护具有一定的难度
短基线
定位系统 系统集成的价格大大低于长基线定位系统,操作比长基线定位系统简单,较方便灵活。测量范围包含基阵水下所有能接收到信号的区域,作业范围比超短基线定位系统广,浅水区域测量精度较高 基元安装位置可能会受到船螺旋桨尾流的扰动影响,对船的要求较高,需要较大的船只。系统安装时,需要在船底稳定固定各基元,并准确量测各基元间的相互位置关系,测量难度较大,一般需要将船开至船坞准确量测、校准
超短基线
定位系统 系统基阵尺寸小,安装使用方便,价格相对较低,测距精度高。结合GPS与罗经设备配合使用,大大减弱了潮流、潮时等因素对水下调查设备位置测量精度的影响 使用前需要进行安装校准,远距离误差发散快,超短基线作用距离不远,远距离定位精度不高,但考虑到琼州海峡水深在100 m以内,水深较浅,USBL水下定位系统的精度较高
3 结束语
结合海南联网海底电缆综合检测水下机器人定位的实际需要,通过分析三种水下定位系统的原理、优缺点和适用性得出,长基线定位系统定位精度最高,但价格昂贵,适合于大面积、深海区域的海洋调查定位;短基线定位系统由于基元距离较远以及船的尾流对基元的扰动影响,对船的要求较高,并且需要在船坞安装、校准;超短基线定位系统仪器设备体积小,易于安装,价格便宜,定位精度较高,对船只没有较高的要求,完全满足海南联网海底电缆检测水下机器人定位的需要。因此,在500 kV海南联网海底电缆综合检测项目中使用超短基线定位系统进行水下定位。
参考文献
[1]陈凯华.海南联网海缆敷设施工与防护[J].南方电网技术,2009(5).
[2]赵远涛.海南联网工程海底电缆风险分析[J].中国电业(技术版),2014(10).
[3]王星,尚涛,黄贤球.海南联网海底电缆护套绝缘监测方法[J].南方电网技术,2009(01).
[4]田春和,秦建.基于长基线水声定位系统水下定位技术初步应用研究[J].水道港口,2015(3).
[5]赵建虎,沈文周,吴永亭,等.现代海洋测绘[M].武汉:武汉大学出版社,2007.
[6]杨保国.超短基线系统安装校准技术研究[D].哈尔滨:哈尔滨工程大学,2013.
〔编辑:刘晓芳〕