
多功能环境监测无人机系统设计
2016-05-25 11:59刘祥林维昌
科技视界 2016年12期
刘祥 林维昌

【摘 要】针对目前在人员难以进入区域的环境实时监测与信息采集,设计了一种可以投放传感节点的无人机系统。此系统主要由无人机与地面站两大分系统构成,通过ZigBee与无线串口的信息互联方式来进行实时数据的采集与监测上传。在整体系统中无人机担任定点投掷平台、空中信息采集平台与数据传输中转平台;地面站系统负责人机交互,交互信息包括传感信息、地图信息、视频信息与控制信号。此外,无人机可搭载摄像头与GPS模块分别进行视频信号的上传与卫星地图的测定显示。在整体系统搭建完成后,通过对整体系统的现场测试,此系统可基本达到设计要求,实现一机多用。
【关键词】环境监测;旋翼无人机;ZigBee;地面站
【Abstract】In order to make the environmental real-time monitoring and information collection in hard-to-reach locations. A new UAV (Unmanned aerial vehicle)system is designed, which can put the sensing nodes in the area. This system consists of the UAV and the ground station, which make the real-time acquisition and monitoring upload through the ZigBee and wireless serial interconnected. The UAV play a role in fixed-point throwing platform, air data collection platform and data transfer platform in the whole system. The ground station system is responsible for human-computer interaction, and the interactive information includes transducer information, maps information, video information and control signal. In addition, the UAV can carry camera for video upload and GPS module for map show. After the overall system completed and tested, this system can meet the desired requirement, and achieved the multi-usage.
【Key words】Environmental monitoring; Rotor unmanned aerial vehicle; ZigBee; Ground station
0 引言
随着近些年来一系列环境灾害与环境事故频发,环境保护被日益重视,环境监测技术的研究越来越引起国内外政府学者的重视。近些年来,无人机已成功用于水环境监测,空气质量监测、有害物质泄漏监测等。纵观环境监测无人机的研究,环境监测无人机除了进行遥感操作外,还应加强对地面环境信息的直接采集。通过对地投放传感器节点,或利用已在地面部署好的传感器节点进行信息获取,构成天地一体的监测网络。这就要求无人机系统应具有传感器节点的投放和定位能力,以及良好的组网通信能力。同时还应提高无人机的飞行效率,争取做到一机多用。
本文阐述了一种多功能环境监测无人机系统,无人机将监测节点空投至需要监测的区域,并和所布置的节点通信,在人员难以进入的地区实现无线传感网的快速部署,无人机在完成上述任务的同时还可以利用自身携带的传感器和摄像头对沿途区域进行环境信息采集,为环境动态监测提供更多的信息获取途径。
1 系统功能设计
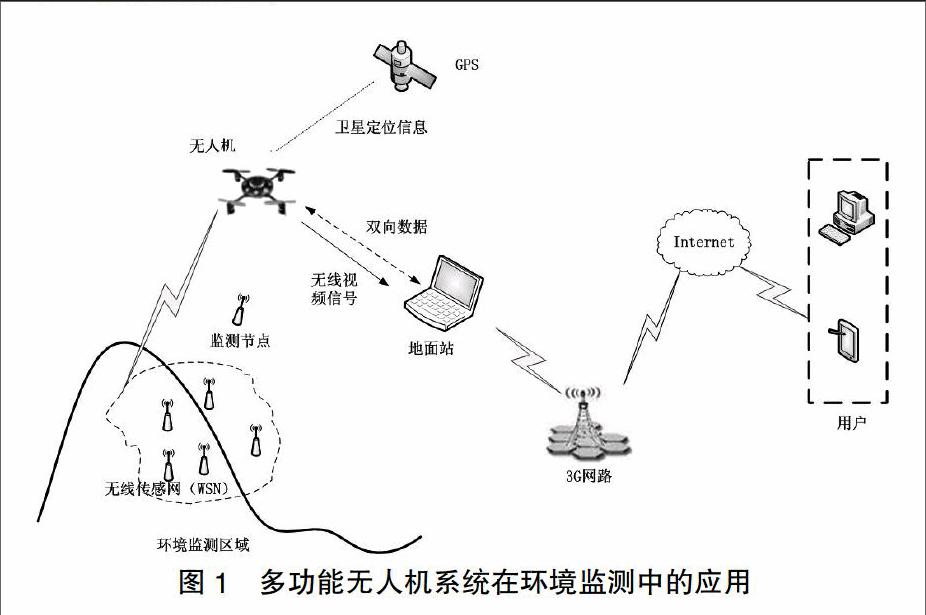
本文所提出的多功能环境监测无人机系统在整个环境监测系统中的应用如图1所示。无人机通过自主飞行飞至监测目标区域,进行遥感信息采集等常规操作,还可以投下传感器节点。所投放的传感器节点自身不带定位装置,而是通过无人机对所部署的传感器节点进行定位,地面站负责对无人机下达各种任务,跟踪监视无人机的动作情况,获得各种信息参数。传感器节点部署完成后,可组成无线传感网(WSN),与无人机一起构成天地一体的环境监测系统。
系统整体设计框图如图2所示,系统主要由无人机和地面站构成。无人机采用多轴旋翼结构作为飞行平台,利用GPS导航及惯性元件为无人机提供飞行姿态参数,在导航系统的设计中,采用了INS/GPS组合导航方式,使用卡尔曼滤波器对低速率的GPS导航解与高速率INS系统输出的数据进行组合处理,对INS系统的误差做出估计并校正后给出组合导航参数。搭载了视频采集与无线视频传输模块,可实现针对目标区域的图像遥感操作,无人机上设有投放装置可以完成监测节点的投放,监测节点采用ZigBee协议通信,并能和无人机上的Master节点通信。地面站系统应用程序采用C#语言编程,通过数传电台地面站可以同无人机进行双向通信,及时获取相关信息并向无人机发布命令。
2 系统硬件设计
2.1 无人机飞行结构设计
目前的多轴旋翼无人机主要有四轴和六轴的机架结构。四轴飞行器作为一种欠驱动系统,控制方式独特、复杂。六轴飞行器作为一个完全驱动系统,其控制稳定性较四轴飞行器要高且对于动力系统失效的容忍程度也会上升,六轴旋翼无人机能够在单发甚至双发失效的状况下仍然可控。本设计采用六旋翼无人机作为系统的飞行平台。
2.2 无人机的航电系统设计
图3给出了无人机的航电系统构成。微控制器单元(MCU)选用微控制器STM32F405RG,负责完成运算和控制,惯性导航器件用来采集无人机的飞行姿态。卫星定位模块采用u-blox公司的NEO-6M模块,惯性导航器件包括三轴陀螺仪MAX21000和三轴加速度计LSM303D,同时选用高分辨率气压传感器MS5611作为高度计,这些模块一起为无人机提供自身定位和飞行姿态信息。伺服系统负责驱动无人机运行,其中无刷电机选取4008KV400电机,无刷电调选取30A旋翼专用电调。投放装置完成环境监测节点的投放。无人机上的摄像头采集实时图像通过无线视频传输设备送地面站使用,地面站通过数传电台可以和无人机进行双向无线通信。系统中传感器节点和定位装置采用支持ZigBee协议的CC2530芯片构成。
2.3 节点投放装置
投放装置如图4所示,固定销可在支架内做平行移动,通过舵机带动连杆机构完成固定销的打开和闭锁。简单且可靠性高。通过给予舵机一路脉宽调制波形(PWM)的不同数值来实现舵机不同的打角度数,带动机械结构实现节点连接件的释放,通过节点自身重力,下沉到目标地面地点,完成投放。
3 系统软件设计
3.1 无人机飞行控制软件设计
1.无人机的控制系统主要分为两个回路:位置控制回路和姿态控制回路。姿态控制回路使无人机按照设定姿态飞行,未知控制回路使无人机能够向指定目标飞行。系统采用经典的PID控制算法实现两个回路的控制。
2.由于惯性导航系统(INS)提供的参数比其他的导航方式要齐备,但容易随时间积累而产生误差,卫星导航系统(GPS)的精度高,然而容易受环境的影响。无人机导航采用GPS/INS组合导航,该组合具有很强的互补性,GPS能够消除INS的积累误差,INS能够在GPS信号失锁时提供短时精确的定位。GPS/INS组合导航系统以数据融合理论作为基础,以卡尔曼滤波作为主要融合方法,对进入组合系统的GPS定位数据与INS定位数据分别进行估计、修正、融合,来解决GPS信号失锁引起的无法定位问题和INS积累误差引起的长时间漂移问题。
3.超声避障是利用机载超声波探测,来实现对旋翼无人机飞行隐患安全的提前判除与实时纠正,使得旋翼无人机生存力大大提高。系统应用环境的不确定性,增加超声波障碍判断来对飞行航迹上的危险体避除。在一定的情况下,应以系统安全为主,因此超声波判定优先级大于导航优先级。
3.2 节点定位系统软件设计
对所投放节点的定位问题可以看成单移动锚节点的节点定位问题,目前的定位算法大致分为无需测距算法和基于测距算法两类,其中基于接收信号强度指示(Received Signal Strength Indication,RSSI)的定位方法就是一种基于测距的定位方法,该方法无需额外硬件,成本低,在无线传感器网络定位算法中被广泛使用。本系统使用ZigBee协议在进行投放节点之间的数据采集传输与机载master主节点之间进行协议通讯,支持ZigBee协议的CC2530芯片本身能够提供RSSI数据,无人机能够实时获得各传感器节点的RSSI数值,然后再通过优化算法来寻找未知节点的坐标估计值使得定位误差最小,完成对所投放节点坐标的定位。
3.3 地面站系统软件设计
地面站系统应用程序采用c#编程,分为三个模块:通信模块、电子地图模块和视频显示模块。通信模块负责地面站与无人机的数据交互通信,无线通信范围可达数公里,当无线联络失效时,无人机能够自动返航,飞回的起飞位置;电子地图模块负责航迹在电子地图上的显示,采用百度地图所提供的API来实现电子地图功能;视频显示模块负责将无线视频接收模块接收回的视频信号显示在相应的视图窗口中。
4 结语
由于无人机具有成本相对较低、无人员伤亡风险、生存能力强、机动性能好、使用方便等优势,使得无人机在环境监测领域有着广阔的应用前景,但在现阶段市场还处于尚未形成规模的初级阶段。本设计提出的多功能环境监控无人机系统将丰富目前的环境应急监控管理手段,为快速准确获取事件现场各类环境信息提供有力支撑,具有广阔的市场和良好的应用前景。
【参考文献】
[1]杨海军,黄耀欢.化工污染气体无人机遥感监测[J].地球信息科学学报,2015,17(10):1269-1274.
[2]靳雷,刘洋,张硕,韩冰.无人机遥感系统在某河流域环境监测项目中的应用[J]. 环境保护与循环经济,2013,33(8):55-57.
[3]王风.基于CC2530的ZigBee无线传感器网络的设计与实现[D].西安电子科技大学,2012.
[4]李大威.卡尔曼滤波在INS/GPS组合导航中的应用研究[D].中北大学,2006.
[5]刘庆元,郝立良,黄书捷,等.改进的 UKF 在 GPS/INS 组合导航中的应用[J]. 测绘科学技术学报,2014,31(5):450-453,458.
[6]李俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报(自然科学版),2012,32(1):114-117.
[7]李国柱.基于PSO的测距模型参数估计三维定位算法[J].计算机测量与控制,2014,22(9):2853-2855.
[8]冯震,李怀兵,丑武胜.旋翼微小型无人机地面站系统的设计与实现[J].计算机工程,2010,36(23):243-245.
[9]杜传明.百度地图API在小型地理信息系统中的应用[J].测绘与空间地理信息,2011,34(2):152-153,156.
[责任编辑:杨玉洁]
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年19期)2019-11-23
电子制作(2019年9期)2019-05-30
电子制作(2018年23期)2018-12-26
中国资源综合利用(2017年4期)2018-01-22
电子制作(2016年15期)2017-01-15
北京航空航天大学学报(2016年8期)2016-11-16
公民与法治(2016年4期)2016-05-17
中国资源综合利用(2016年12期)2016-01-22
