
一种自动清洗玻璃装置的研究
2016-05-25 00:49王灿施泓博孙长范
科技视界 2016年12期
王灿+施泓博+孙长范

【摘 要】本文介绍了一种能让清洁玻璃更加自动化,同时又具有一定的安全性和较高的清洁效率的装置,所做的研究采用把传统机械工艺和自动化控制相结合的方法,采用履带结合吸盘的行动部件,擦洗和吹尘并存的清洁部件,该研究的结果规避了不能完全实现自动化,安全性能低,清洁效率低这些现存的缺点。在经过3D建模和模型设计及制作后,根据研究成果表明,该装置的设计是可行且具有创新性的。
【关键词】玻璃清洗;自动化;安全;机电结合
【Abstract】A device is introduced that makes the cleaning of glass more automatic and that has certain security and higher cleaning efficiency. The research adopts a method of combining the traditional mechanical process and automation control. The method uses action parts that the crawler combined with sucker and cleaning components that can clean followed with blow the dust. The results of the study can avoid some existent drawbacks such as the imperfection of automation, the absence of safety and cleaning efficiency. According to the research results, the design of the device is feasible and innovative after the 3D modeling and model design and production.
【Key words】Glass cleaning; Automation; Safety; Mechanical and electrical integration
0 引言
随着我国建筑业的飞速发展,出现了越来越多的高层建筑,因为玻璃幕墙美观、透光性好,所以很多建筑外表也都以玻璃幕墙为主,但与此同时就产生了一项高危工作——高空清洗玻璃。现实中曾经多次出现因为在高空作业时,由于风向等环境因素的多变性和不可控性,使得吊车摇晃撞击至玻璃幕墙,严重危及了工作人员的生命安全。因此将玻璃清洁工从此项工作中解放出来非常必要[1]。目前的研究中已经有不少该方面的成果及案例,但实用性不高,大规模地投入生产使用较为困难[2]。该项目所研究的“清洗玻璃装置”从实用性出发,用机电结合的结构,巧妙的设计方法,实现自动化的清洗玻璃装置,整体结构设计如图1所示。
1 运动机构设计
1.1 行走部件
首先在爬行方式上,充分利用玻璃的易吸附性,采用多个吸盘实现与玻璃之间的固定,为了使装置行走起来更加稳定,同时考虑到擦洗玻璃时装置无需较高的速度,故采用履带作为行动部件。
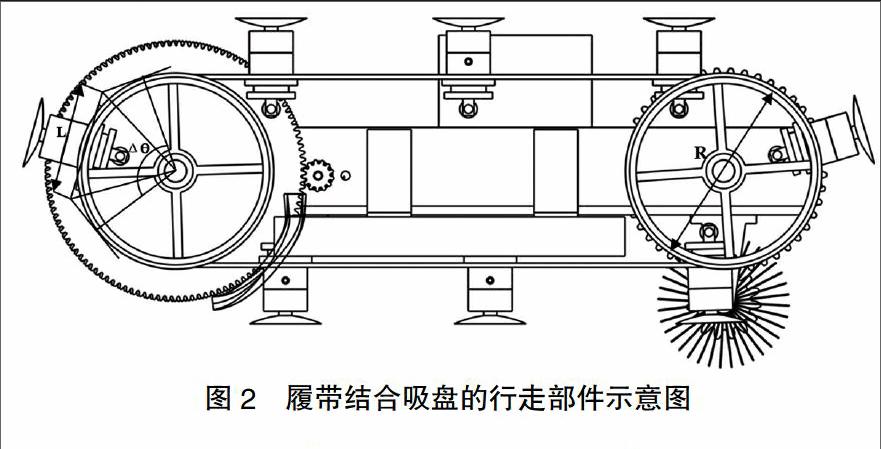
如图2所示吸盘装置尾端的机械阀,分别安装在两条履带的外表面,用螺栓与从动件连接。
设轮子直径R=42mm,吸盘固定端的距离L=15mm,轮子与带摩擦系数u=0.8,如果同时有2个吸盘进入圆轨道,则履带伸长量?驻L=4*(L/2-R/2*arctan(L/2/(R/2))=1.1mm,则由计算结果可得出履带的伸长量是很小的。
当吸盘全部进入圆轨道时,主动轮减小的包角设为?驻θ,则?驻θ=4* arctan(7.5/21)≈75°,设轮子与履带之间各处的摩擦力相等,则包角的总量减少75°。
设车的重力为60N,由2*F0*sin(75°/2)*0.8≥60,计算得出此时的预紧力F0≥30/sin37.5°/0.8=61N。所以当有两个吸盘进入圆轨道时,履带与带轮之间不会产生打滑。
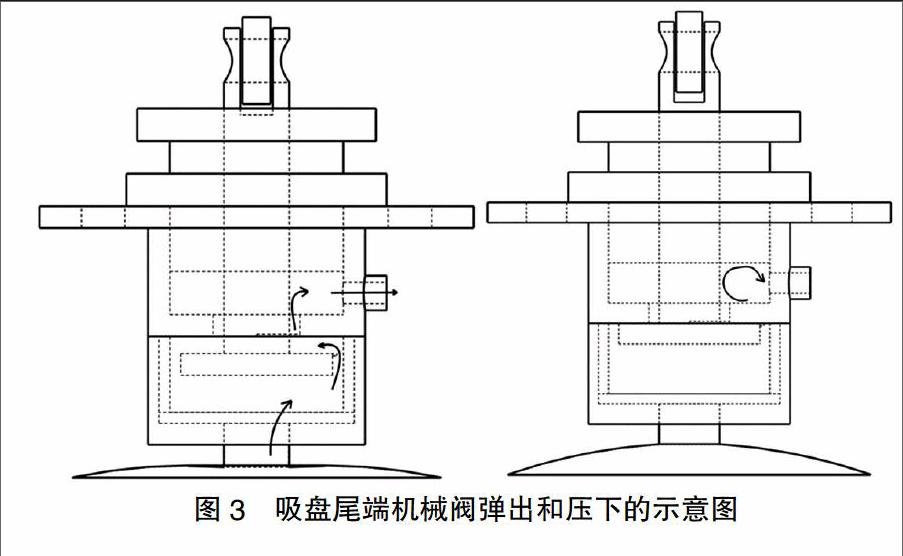
从动件在导轨的指引下随着轮的转动平稳运动,位于导轨之间的曲面凸轮控制机械阀的运动,如图3右所示,当吸盘未进入导轨之前,由于机械阀内的弹簧作用,机械阀内的开口关闭,一旦吸盘移动至导轨内,如图3左,位于机械阀顶端的滚动支承被曲面凸轮下推,真空阀与吸盘之间形成自由的空气流动,使其与外接的真空抽气管接通,调压膜内部产生负压,吸盘则被紧紧的吸附在玻璃表面上[1]。吸盘运动出导轨后,滚动支承则被弹簧弹起上移,吸盘被释放,由于履带运动的拉力作用,使吸盘与玻璃脱落。随着机械阀的重复开启和关闭,使整个装置能够平稳行走在玻璃表面上[2]。
再者,这样的行走部件使得装置的实际大小具有一定的灵活性和可调整性,当装置较大时,固然重量会增加,但同时履带会变长,吸盘的数目也就随之变多,产生的吸力就会变大,从而能够与装置的重量相匹配。
1.2 系统程序设计
该装置的控制系统本着实用简单的原则,以atm89c52单片机作为控制核心[4],程序流程如图4(a)所示,因为擦洗玻璃时不需要复杂的曲线运动路径,所以在方向控制上,用往返直线运动作为一个擦洗循环。如果遇到小型的障碍物,如玻璃之间的粘合带,运动中利用履带上两个吸盘之间的间距就能直接跨越障碍[3],如果遇到较大的障碍,可以通过控制两个电机的不同转速,从而形成两条履带的运动速度差,当左边履带速度大于右边时,装置向左边转向,当右边履带速度大于左边速度时,装置向右边转向。
整个装置的控制由无线信号遥控完成,当距离较远时,可能会出现控制信号强度不够的现象,故设计了信号强度反馈机制,当信号接收不稳定的时候,装置能够自动做出调整并做返回运动,避免出现装置完全不受控制的情况发生。
2 清洁机构设计
该装置在清洁方面采用吹尘和擦洗相结合的设计,吹尘装置位于装置的前方,除去玻璃上的积尘同时又有利于吸盘与玻璃的吸附,吹尘的气流来源于真空发生器在抽吸吸盘调压膜时产生的气体,有效地提高了动力的利用率。擦洗装置位于后方,由存放有清洁剂的毛刷组成,通过主动轮上的齿轮带动旋转,对玻璃表面进行进一步的清洁,同时产生向前的摩擦力,能够推动装置的前进。
3 安全应急预案设计
作为一个垂直运动在玻璃幕墙上的装置,预防其在突发情况下(比如突然断电或者遇到外力撞击)发生坠落的危险是非常必要的。经过实验的分析和研究,该装置在安全设计上,准备了两种应急预案,控制流程如图4(b)所示,第一种是当装置在清洗时处在离地高度不超过10m的玻璃幕墙上时,采用足够长度的绳子一端系住装置,另一端固定在高处,这样在装置出现突然坠落的时候就能够不让其摔落在地或者砸伤人员,第二种是当装置在清洗时的离地高度超过10m时,在装置的腹部安装红外线传感器,一旦装置离开玻璃表面,控制单元便会发送指令给降落伞弹出装置,让其在短时间内迅速做出响应,弹出并打开降落伞使得装置能够安全降落。
设计这两种方案的目的是保证在安全的前提下,能使得装置在清洗的过程中更加流畅,当高度不足以让降落伞打开产生阻力,让装置安全下落时,用绳子是最安全可靠的,而且此时高度不高,清洁的作业面积有限,绳子对装置清洁及运动的干扰也较小,当高度足以让降落伞弹出打开,让装置的下落降到安全速度时,采用信号控制降落伞弹出打开的方案比较合适,因为此时清洁的作业范围较大,使用安全绳可能会对装置的运动造成干扰,而且使用起来不够便捷,此时装置自身携带的降落伞弹出装置,及时对突发情况做出响应,避免安全事故的发生。
4 结语
综上所述,该装置以“能够稳定运动在玻璃幕墙上并对玻璃进行一定程度的清洁”为目的,在行走部件上,很充分的利用了机电结合的优势,提高了动力的利用率,降低了控制系统的复杂性。在清洁环节上,设计了两次清洁的过程,使得清洁程度得到了提高,并且利用了气流吹吸的循环以及清洁毛刷自身产生的摩擦力,有效的降低了动力的损耗。在安全设置上,对不同环境做出应急预案,提高了装置整体运作的灵活性。
【参考文献】
[1]孟宪超,王祖温,包钢,SKTSO,邵浩.一种多吸盘爬壁机器人原型的研制[J].机械设计,2003,20(8)∶30-33.
[2]姬国钊,张世伟,王奇斌,李俊秀,王卓.真空吸盘式爬壁清洗机器人的研究与开发[J].机械研究与应用,2009(4)∶5-8.
[3]谢宇,曹彤,焦晓凯.多吸盘式擦窗机器人的吸附系统研究[J].液压与气动,2007(2)∶10-11.
[4]骈根,汉文政,薛志超.基于单片机的三种爬墙机器人设计与实现[J].科技风,2014(21)∶69-70.
[责任编辑:杨玉洁]
