机器人与3D腹腔镜辅助直肠癌根治术近期疗效对比研究
2016-05-25 00:37杜晓辉邹振玉李荣
腹部外科 2016年3期
杜晓辉 邹振玉 李荣
·论 著·(临床实践)
机器人与3D腹腔镜辅助直肠癌根治术近期疗效对比研究
杜晓辉 邹振玉 李荣
目的 对比达芬奇机器人直肠癌根治术与3D腹腔镜直肠癌根治术的术后近期疗效和安全性。方法 回顾性分析2009年6月至2015年10月间解放军总医院实施的达芬奇机器人直肠癌前切除术64例的临床资料。选择2014年6月至2015年10月间同中心同手术组实施的临床病理基线特征相似的3D腹腔镜直肠癌前切除术128例的临床资料作对比。结果 达芬奇机器人组较3D腹腔镜组术中出血量明显减少[(53.75±12.28) ml比(77.97±59.21) ml,P=0.000],但手术时间较3D腹腔镜组延长[(205.44±110.60) min比(175.55±37.68) min,P=0.039]。两组术后肛门排气时间、恢复进食时间、留置导尿时间、淋巴结清扫数目、术后并发症、术后住院时间等方面差异均无统计学意义(P>0.05)。达芬奇机器人组的手术费用明显高于3D腹腔镜组[(9.44±1.33)万元比(6.86±1.18)万元,P=0.003]。结论 3D腹腔镜直肠癌前切除术是一项安全有效的新技术,与机器人手术相比,在推广应用方面具有明显优势。
达芬奇机器人手术系统;腹腔镜;直肠肿瘤;预后
自1990年首次报道腹腔镜治疗结直肠疾病以来,腹腔镜直肠癌手术逐渐发展成熟。2006年,Pigazzi等[1]首次报道应用达芬奇机器人手术系统完成直肠癌根治术,标志着微创胃肠外科进入了一个新时代。达芬奇机器人突出的3D视觉效果使术野清晰、逼真,更加符合术者需求,这为3D腹腔镜的问世提供了帮助。我院2009年6月完成国内首例机器人直肠癌前切除术[2],2014年6月开始应用3D腹腔镜进行直肠癌外科手术,至2015年10月总共完成机器人直肠癌根治术近百例,3D腹腔镜直肠癌根治术近200例,取得了良好的手术效果。现就二者的近期疗效、安全性等报告如下。
资料与方法
一、研究对象
研究对象纳入标准:①直肠癌术前病理诊断明确,术前MRI和CT检查排除直肠环周切缘阳性和远处转移;②肿瘤位于肛管齿状线以上、距肛缘15 cm以内,接受达芬奇机器人或3D腹腔镜手术,术式均为直肠癌前切除术;③术前未接受放化疗。排除标准:①腹腔和盆腔手术史;②肿瘤合并梗阻、出血或穿孔;③肿瘤侵及邻近器官需要行联合脏器切除术者。
按上述标准纳入2009年6月至2015年10月间施行的达芬奇机器人直肠癌前切除术64例,按2∶1的病例数匹配2014年6月至2015年10月间施行的3D腹腔镜直肠癌前切除术128例。全部192例均为单中心病例,由同一术者和手术团队完成。达芬奇机器人组中,男女比为1.5,年龄为38~90岁。3D腹腔镜组中,男女比为1.2,年龄为32~82岁。两组病人的临床病理资料详见表1。

表1 达芬奇机器人手术组与3D腹腔镜手术组临床病理资料比较
二、手术方法
均采用气管插管全身麻醉。病人为头低脚高截石位。
达芬奇机器人手术一般采用四孔法布局:A孔,脐偏上偏右各3~4 cm处为观察孔;B孔,位于右侧腋中线与髂前上棘连线,距观察孔不小于8 cm,作为机器臂主操作孔;C孔,脐与左侧髂前上棘连线中外1/3处,作为机器臂辅助操作孔;D孔,根据术中情况在A孔与B孔或A孔与C孔之间置入腹腔镜Trocar,用于助手冲洗、牵拉、吸引、结扎等辅助操作[3]。常规中间入路,按照全直肠系膜切除(total mesorectal excision,TME)要求进行直肠系膜的游离及肠系膜下血管的结扎切断。Ⅱ臂提起直肠向左向头侧牵拉,Ⅰ臂用超声刀在骶骨岬水平,右侧输尿管内侧2 cm处切开腹膜,进入Toldt间隙,向上游离至肠系膜下动脉根部,距离动脉根部2 cm离断肠系膜下动脉,清扫周围直肠与淋巴组织,钝锐性结合扩大Toldt间隙,显露并保护左侧输尿管,再向下方游离骶前间隙,直肠远端的游离需达到盆底肌平面,在分离过程中应保持盆筋膜脏层完整,注意保护腹下神经丛和盆神经丛。直肠远端的离断由助手从12 mm辅助孔插入切割闭合器完成,在机器人镜头下完成吻合[4]。
3D腹腔镜手术采用五孔法布局:脐上为镜头孔,脐左右侧为辅助孔,右侧麦氏点为主操作孔,反麦氏点为辅助孔。中间入路游离直肠和系膜,按照TME要求进行直肠系膜的游离及肠系膜下血管的结扎切断。经辅助切口体外切除肿瘤,镜下完成消化道吻合。
三、观察指标
对达芬奇机器人组和3D腹腔镜组的手术情况和术后早期预后情况进行对比,纳入观察指标包括:手术总时间、术中出血量、中转开腹率、术后肛门排气时间、术后恢复进食时间、术后留置导尿时间、淋巴结清扫数目、术后并发症、术后住院时间及总体手术费用。
四、统计学方法

结 果
两组病人术后平均随访时间为102 d(29~154 d)。无肿瘤复发和死亡病例。两组病人的手术情况及近期预后情况详见表2。
64例达芬奇机器人手术的手术时间为(205.44±110.60) min,128例3D腹腔镜手术的手术时间为(175.55±37.68) min,两者差异有统计学意义(P<0.05)。达芬奇机器人组的术中出血量明显少于3D腹腔镜组(P<0.01)。两组病人术程顺利,均无中转开腹病例。
通过观察术后肛门排气时间、恢复进食时间及留置导尿时间评价病人术后胃肠功能和膀胱功能的恢复情况。本组64例达芬奇机器人手术及128例3D腹腔镜手术在肛门排气时间、恢复进食时间和留置导尿时间方面差异均无统计学意义(P>0.05),提示两种手术方式在术后胃肠功能和膀胱功能的恢复方面无明显差异。
淋巴结清扫数目和术后并发症是说明不同手术方式近期效果和安全性的可靠指标。达芬奇机器人组的淋巴结清扫数目为(14.08±3.98)枚,3D腹腔镜组的淋巴结清扫数目为(14.40±5.77)枚,两者差异无统计学意义(P>0.05)。达芬奇机器人手术组出现2例吻合口瘘,3D腹腔镜组出现3例吻合口瘘,均经保守治疗后治愈,两组并发症发生率差异无统计学意义(P>0.05)。
此外,在术后住院时间上,达芬奇机器人组与3D腹腔镜组差异无统计学意义(P>0.05)。但在经济学指标方面,达芬奇机器人组的手术费用在基础手术费用基础上追加2万元,因此明显高于3D腹腔镜组(P<0.01)。
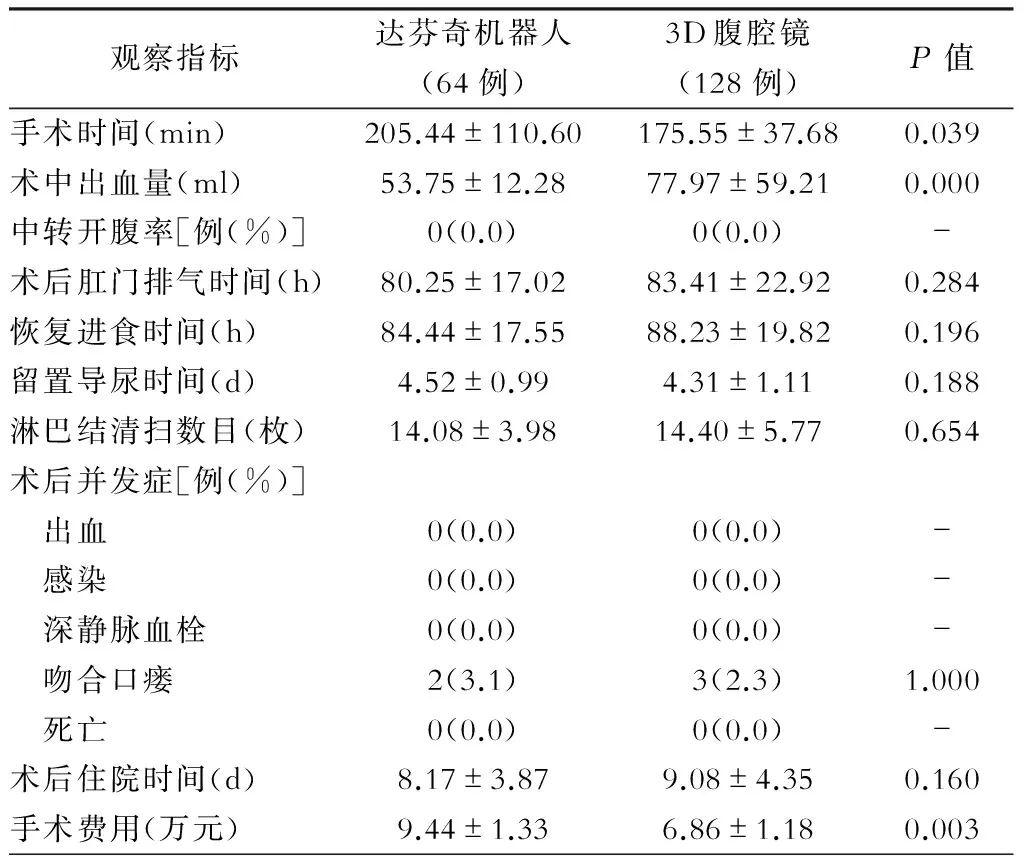
表2 达芬奇机器人手术组与3D腹腔镜手术组手术情况及近期预后比较
讨 论
自1990年美国Jacobs等[5]完成首例腹腔镜结肠切除术以来,腹腔镜技术已在消化道恶性肿瘤的治疗方面得到广泛应用。鉴于直肠癌和盆腔、盆底的解剖特点,在腹腔镜下施行直肠癌TME手术具有明显优势[6],已成为直肠癌的标准术式。但是,由于常规2D腹腔镜缺乏空间感和深度感,手术操作难度大,学习曲线长,在一定程度上限制了腹腔镜的全面普及。
2000年7月,美国FDA批准达芬奇机器人手术系统应用于外科领域。与传统腹腔镜技术相比,其清晰的三维立体术野,高度灵活的仿真机器臂和智能化的电脑分析功能使手术更加精准,更适合在盆腔狭小空间操作的直肠癌手术。大量研究证实了机器人TME手术的疗效及安全性[7-10]。但是,该系统本身及耗材售价昂贵是其不可避免的劣势。加之术前装机准备时间较长,镜头臂活动角度有限,腹腔内多象限操作繁琐均导致手术时间延长,这为3D腹腔镜的问世提供了帮助。3D腹腔镜弥补了传统腹腔镜的2D视野,提高了手术精准度,使外科医师对腹腔镜手术的理解更加直观。虽然已有临床研究表明3D腹腔镜直肠癌手术优于传统2D手术[11-12],但3D腹腔镜与机器人直肠癌根治术的临床对比资料甚少。
笔者通过对比单中心同一手术团队实施的机器人和3D腹腔镜直肠癌前切除术发现,机器人手术的明显优势在于术中出血量少。机器人手术中,术者的动作通过手柄传送到腹腔内器械的头端,消除了震颤,增加了操作的精准度和安全性,也更易实现血管的骨骼化,降低了出血的风险和淋巴结清扫的难度[6]。尤其是在结肠脾曲的游离、狭窄盆腔的解剖、神经丛的辨认及手工缝合低位吻合口等方面具有明显优势[13]。而在手术时间和手术费用方面,机器人组明显高于3D腹腔镜组,这在一定程度上限制了机器人手术在国内的推广应用。在术后胃肠功能和膀胱功能恢复、淋巴结清扫和并发症方面,3D腹腔镜组与机器人组并无显著差异,提示3D腹腔镜的操作安全性和肿瘤安全性可以媲美机器人手术系统。我国学者余佩武等[14]总结了传统腹腔镜、3D腹腔镜和达芬奇机器人的手术特点,提出达芬奇机器人手术优于3D腹腔镜手术,主要在于以下几点:①手术舒适度:3D腹腔镜手术需要佩戴3D偏光眼镜以实现立体视觉,且需站立完成手术,术者易疲劳;而机器人手术的直视下三维立体高清图像比人眼更清晰,无需佩戴眼镜,不易造成视觉疲劳,且术者采取坐姿,有利于完成长时间而复杂的手术。②团队依赖性:3D腹腔镜手术对团队依赖性高,需要助手协助牵拉以显露良好的视野,而机器人手术依靠术者自行调节镜头和辅助机械臂,对团队依赖性低。但笔者认为,对于腹腔镜手术经验丰富的团队来说,手术舒适度和团队依赖性方面的优势并不明显。而且,3D腹腔镜系统能提供精确的空间定位,能够明显缩短青年医师的学习曲线,易于推广,培训者仅需佩戴3D眼镜就能观察手术操作过程,在教学上具有更强的可实施性[6,15]。
因此,综合比较达芬奇机器人和腹腔镜直肠癌前切除术的安全性和近期疗效,以及在学习曲线和应用推广方面的差异,笔者认为,3D腹腔镜更符合我国国情,是未来腹腔镜手术的发展趋势。
1 Pigazzi A,Ellenhorn JD,Ballantyne GH,et al.Robotic-assisted laparoscopic low anterior resection with total mesorectal excision for rectal cancer. Surg Endosc,2006,20:1521-1525.DOI: 10.1007/s00464-005-0855-5.
2 杜晓辉,沈笛,夏绍友,等.应用达芬奇机器人手术系统治疗低位直肠癌.中华消化外科杂志,2010,9:116-118. DOI:10.3760/cma.j.issn.1673-9752.2010.02.013.
3 Du XH,Shen D,Li R,et al.Robotic anterior resection of rectal cancer: technique and early outcome.Chin Med J(Engl),2013,126:51-54.
4 杜晓辉,李荣,李松岩,等.机器人直肠癌根治术临床应用探讨.中华腔镜外科杂志:电子版,2013,6:27-29.DOI: 10.3877/cma.j.issn.1674-6899.2013.05.008.
5 Jacobs M, Verdeja JC,Goldstein HS.Minimally invasive colon resection (laparoscopic colectomy).Surg Laparosc Endosc,1991,1:144-150.
6 杜晓辉. 腹腔镜和达芬奇机器人系统在胃肠外科中的应用.上海医药,2014,35:4-7,16.
7 Kwak JM,Kim SH,Kim J,et al. Robotic vs laparoscopic resection of rectal cancer: Short-term outcomes of a case-control study. Dis Colon Rectum, 2011, 54:151-156. DOI: 10.1007/DCR.0b013e3181fec4fd.
8 D'Annibale A, Pernazza G, Monsellato I, et al. Total mesorectal excision:A comparison of oncological and functional outcomes between robotic and laparoscopic surgery for rectal cancer. Surg Endosc,2013,27:1887-1895.DOI: 10.1007/s00464-012-2731-4.
9 Xiong B,Ma L,Huang W,et al.Robotic versus laparoscopic total mesorectal excision for rectal cancer: A meta-analysis of eight studies.J Gastrointest Surg,2015,19:516-526.DOI: 10.1007/s11605-014-2697-8.
10 Park EJ,Cho MS, Baek SJ, et al. Long-term oncologic outcomes of robotic low anterior resection for rectal cancer:A comparative study with laparoscopic surgery. Ann Surg,2015,261:129-137.DOI: 10.1097/SLA.0000000000000613.
11 季福建,刘选文,刘卓,等.3D腹腔镜系统在进展期直肠癌闭孔淋巴结清扫中的应用.中华胃肠外科杂志, 2014, 17:1121-1124. DOI: 10.3760/cma.j.issn.1671-0274.2014.11.015.
12 陈海金,俞金龙,黄宗海,等.三维高清腹腔镜在腹腔镜直肠癌根治术中的应用.中华解剖与临床杂志, 2014, 19:49-50. DOI: 10.3760/cma.j.issn.2095-7041.2014.01.013.
13 黄志强.21世纪外科从2D到3D——从腹腔镜到机器人. 中华普外科手术学杂志:电子版,2010,3:226-234. DOI: 10.3877/cma.j.issn.1674-3946.2010.03.001.
14 余佩武,郝迎学.机器人优于2D和3D腹腔镜.中华胃肠外科杂志,2015,18:767-768.DOI: 10.3760/cma.j.issn.1671-0274.2015.08.008.
15 郑民华,马君俊.低位直肠癌腹腔镜保肛手术学习曲线和技术准入.中国实用外科杂志,2014, 34:831-834.DOI:10.7504/CJPS.ISSN1005-2208.2014.09.11.
Comparison of short-term outcomes between robotic and 3D laparoscopic-assisted anterior resection of rectal cancer
DuXiaohui,ZouZhenyu,LiRong.
DepartmentofGeneralSurgery,ChinesePLAGeneralHospital,ChinesePLAMedicalSchool,Beijing100853,China
LiRong,Email:lirong@medmail.com.cn
Objective To compare the short-term outcomes and security of anterior resection of rectal cancer between Da Vinci robotics surgical system and three-dimensional (3D) laparoscopy.Methods The clinicopathological data from 64 rectal cancer patients who underwent robotic anterior resection at Chinese PLA General Hospital from June 2009 to October 2015 were retrospectively analyzed. 128 patients undergoing 3D laparoscopic anterior resection of rectal cancer operated by the same surgeons at Chinese PLA General Hospital from June 2014 to October 2015 and matched for the baseline of clinicopathological data with those subject to robotic anterior resection were selected.Results The blood loss was significantly less in the robotic group than in the 3D laparoscopic group (53.75±12.28 vs. 77.97±59.21 mL,P=0.000). The operating time was longer in the robotic group than in the 3D laparoscopic group (205.44±110.60 min vs. 175.55±37.68 min,P=0.039). There were no significant differences in the time of first flatus passage, the time of first diet, the time of removing the urinary catheter, the number of retrieved lymph nodes, the complications, and the length of hospital stay between two groups. In addition, the cost of surgery was significantly higher in robotic group than in 3D laparoscopic group (9.44±1.33 thousands Yuan RMB vs. 6.86±1.18 thousands Yuan RMB,P=0.003).Conclusions 3D laparoscopic anterior resection of rectal cancer is safe and effective.
Da Vinci robotic surgery system; Laparoscopy; Rectal neoplasms; Prognosis
100853 北京,解放军总医院普通外科
李荣,Email: lirong@medmail.com.cn
R735.3+7
A
10.3969/j.issn.1003-5591.2016.03.013
2016-01-08)
猜你喜欢
中国药理学通报(2022年10期)2022-10-14
中国典型病例大全(2022年7期)2022-04-22
临床外科杂志(2021年1期)2021-12-02
中老年保健(2021年11期)2021-08-22
昆明医科大学学报(2021年4期)2021-07-23
临床外科杂志(2020年9期)2020-12-14
中国医疗美容(2020年9期)2020-12-03
工业设计(2019年6期)2019-07-08
作文周刊·小学二年级版(2017年6期)2017-07-12
腹腔镜外科杂志(2016年10期)2016-06-01