
基于Kinect的Nao机器人动作模仿系统的研究与实现
2016-05-24 12:01于建均门玉森阮晓钢赵少琼
智能系统学报 2016年2期
关键词:概率模型
于建均,门玉森,阮晓钢,赵少琼
(北京工业大学 电子信息与控制工程学院,北京 100124)
基于Kinect的Nao机器人动作模仿系统的研究与实现
于建均,门玉森,阮晓钢,赵少琼
(北京工业大学 电子信息与控制工程学院,北京 100124)
摘要:为避开复杂繁琐的底层运动控制,使机器人能够通过学习实现运动技能的获取,有效提高其智能性,将体态感知技术与仿人机器人Nao相结合,以机器人的模仿学习框架为指导,开发并实现了基于Kinect的Nao机器人动作模仿系统。利用Kinect体感摄像机的骨骼跟踪技术,采集示教者骨骼点信息,经预处理后得到示教数据,通过高斯混合模型(GMM)对示教数据进行表征学习,经高斯混合回归(GMR)泛化处理后,映射到Nao机器人中,实现动作的模仿。实验结果表明,Nao机器人能够进行实时和离线的动作模仿,运动轨迹平滑而稳定,动作模仿的效果较好。
关键词:模仿学习;机器人控制;体态感知;概率模型;高斯混合模型;高斯混合回归
中文引用格式:于建均,门玉森,阮晓钢,等. 基于Kinect的Nao机器人动作模仿系统的研究与实现[J]. 智能系统学报, 2016, 11(2): 180-1187.
英文引用格式:YU Jianjun, MEN Yusen, RUAN Xiaogang, et al. The research and implementation of behavior imitation system about Nao robot based on Kinect[J]. CAAI transactions on intelligent systems, 2016, 11(2): 180-187.
仿人机器人是研究人类智能的高级平台,它是集机械、电子、传感技术、控制、人工智能、仿生学等多学科的复杂智能系统。在近50 年的发展历程中,仿人机器人技术取得了飞速的发展,已成为机器人领域的重要研究方向之一。Nao机器人是Aldebaran Robotics公司开发的一款可编程类人机器人,在研究领域得到世界范围的广泛应用,不仅应用于机器人研究、人工智能、工程学和计算机科学领域,还运用在社会学和医疗保健领域,其研究项目包括语音识别、视频处理、模式识别、自闭症治疗、多智能体系统、路径规划等。是否具备学习的能力是机器人智能性的重要体现,而模仿学习[1]作为机器人学习的重要方式,为避开繁琐困难的底层运动控制实现复杂运动的生成提供了可能,在机器人仿生学中占有重要地位。
所谓模仿学习是指模仿者(机器人)通过“观察”示教者(人或机器人)的运动行为,学习运动控制策略,泛化输出,进而获取运动技能[2]。模仿学习的过程可分为3个过程:行为感知、行为表征、行为再现,分别对应示教数据获取,特征编码进行表征学习和泛化输出的过程。示教数据的获取通过体态感知来实现,体态感知作为一种自然的人机交互方式,以其传达意图的便捷性和丰富性,能够有效实现人机对话,在智能识别与控制系统中应用广泛,常见的体感设备有惯性穿戴式系统,如3DSuit、数据手套等,光学式动作捕捉系统,如微软的Kinect体感摄影机等。表征学习是对示教数据的特征进行编码,基于概率模型的轨迹水平表征是将运动建模为随机模型,如高斯混合模型(GMM)[3-5]、隐马尔可夫模型(HMM)[6]等,具有较强的编码和噪声处理能力,抗干扰性强,能够处理高维问题。行为再现包括运动轨迹再现和运动控制再现,轨迹再现是将编码的数据通过回归技术,如高斯过程回归(GPR)[7]、高斯混合回归(GMR)[8]等,得到泛化输出的过程,控制再现是将泛化的输出映射到机器人底层运动控制中,实现动作复现,即行为动作的模仿。
机器人动作模仿系统的研究已取得一定进展,但大多是在仿真环境下的实现,见文献[9-10];物理环境下的实现如文献[11],利用穿戴式动作捕捉系统Xsens MVN进行数据的采集,实现机器人的动作模仿,取得了良好的效果,但其数据采集所需的硬件代价较高,文献[12]能够实现基本动作的模仿,但对复杂动作的再现可靠性和稳定性不足。
本文以模仿学习的框架为指导,将体态感知与Nao机器人相结合,构建了机器人的动作模仿系统,实现了Nao机器人动作模仿学习。利用Microsoft的Kinect体感摄像机进行骨骼跟踪,获取示教者示教过程中人体节点的空间坐标信息,经预处理后得到模仿学习的示教数据;通过高斯混合模型(GMM)对示教数据进行编码表征,利用高斯混合回归(GMR)泛化输出,映射到Nao机器人中,实现动作的模仿。该系统可以实现在线和离线两种模式的动作模仿,在线模式下,可以进行实时的复杂动作模仿,运动轨迹平滑稳定;离线模式下可以通过学习多次示教泛化出最佳轨迹,具有较强的噪声处理能力,而且可以通过控制重采样点数目,实现动作执行速度的控制,更主要的是一旦学会,可以形成动作记忆,实现示教动作的重复执行。
1Nao机器人模仿学习系统构建
以机器人模仿学习的框架为指导,构建了Nao机器人动作模仿的系统结构,如图1所示。利用Kinect的骨骼跟踪,采集示教者骨骼点三维空间坐标信息,经上位机预处理实现示教数据获取;通过GMM对示教数据信息进行编码,利用GMR泛化输出后,通过Ethernet(以太网)与下位机通信,映射到Nao机器人的底层运动控制中,在Nao机器人的Linux内核下进行运动控制,实现动作的模仿。
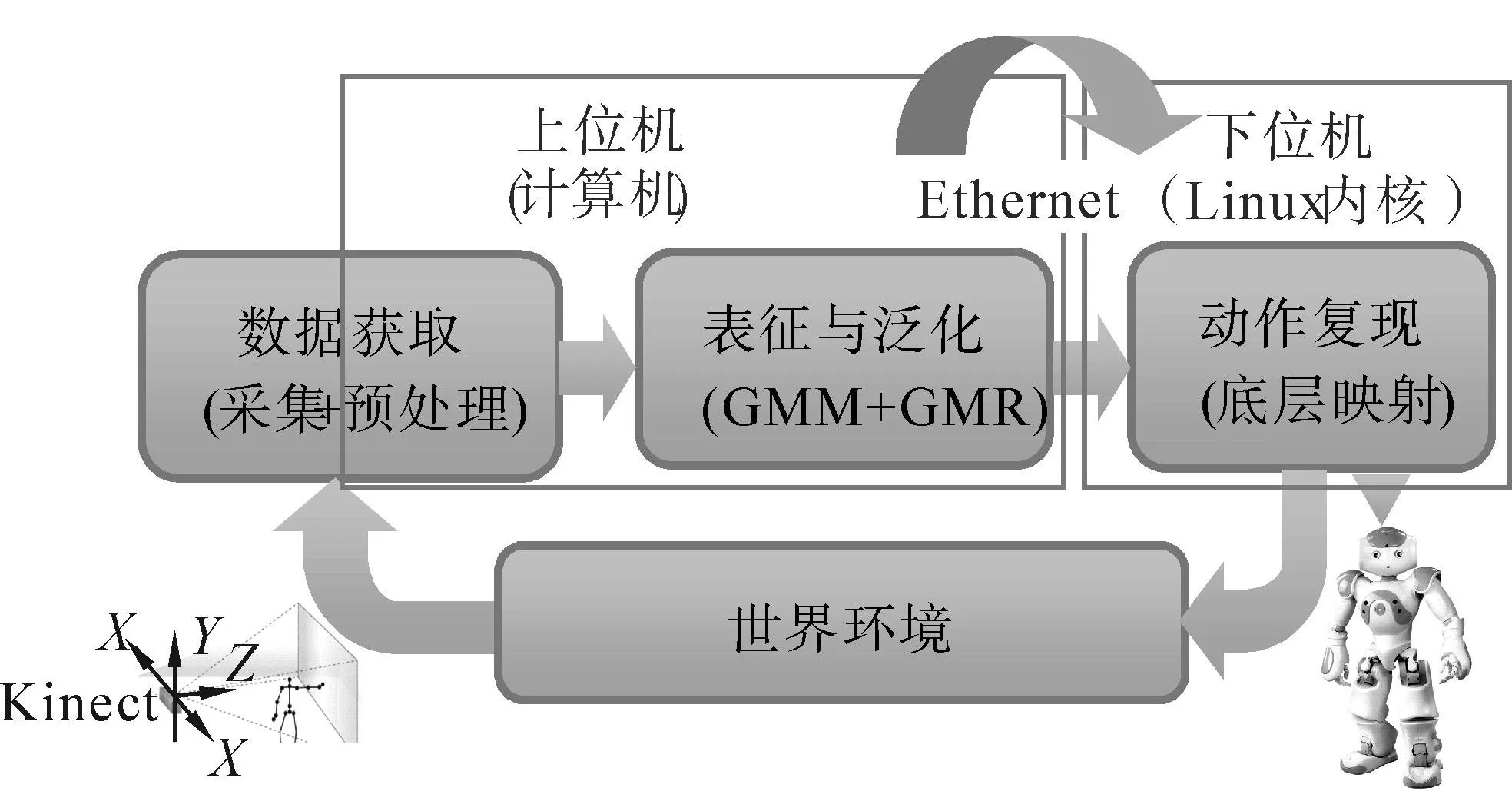
图1 机器人动作模仿的系统结构Fig.1 The system structure of robot imitation
2示教数据的获取
示教动作信息的获取是机器人模仿实现的基础,系统利用Kinect采集骨骼点信息,建立虚拟坐标系,由节点信息得到各关节向量,计算向量间的夹角,进而得到各关节控制角度,即可获得各关节运动信息,为模仿的表征学习提供数据支持。
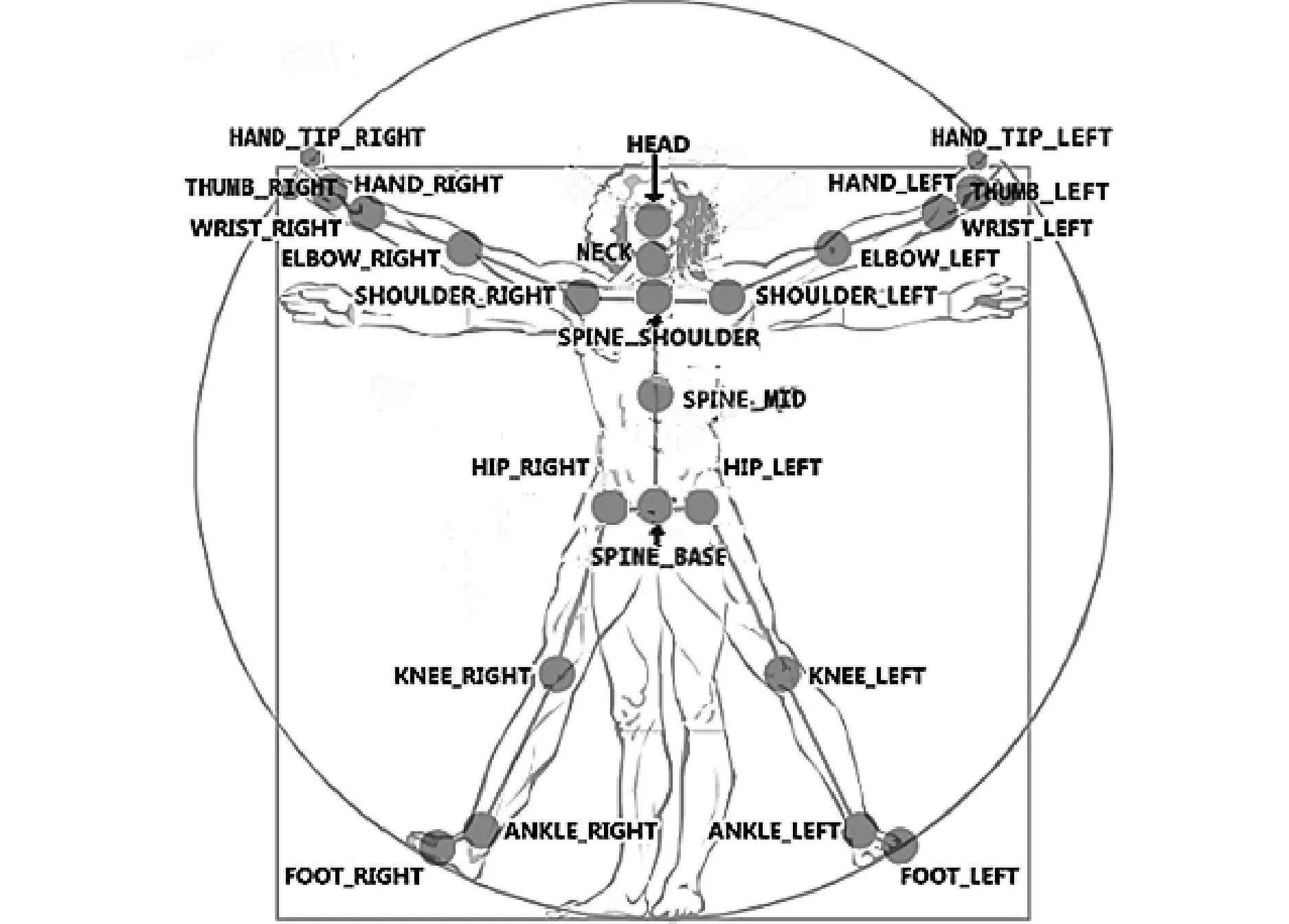
图2 Kinect提取的人体骨骼点信息Fig.2 Skeleton point information of human body extracted from Kinect
2.1示教者骨骼点信息采集
Kinect for windows v2 是微软专为开发者发布的一款3D体感摄影机,包含RGB 彩色摄像机及由红外线发射器和红外线CMOS 摄像机所构成的3D 深度传感器,利用彩色摄像头采集到的彩色图像与红外摄像头采集到的深度图像,导入即时动态捕捉、影像辨识功能,能够提取25个关节点,从而得到人体的骨架信息,S=[s1,s2,…,si,…,s25],其中si=(xi,yi,zi),如图2,Kinect的空间坐标系如图3。
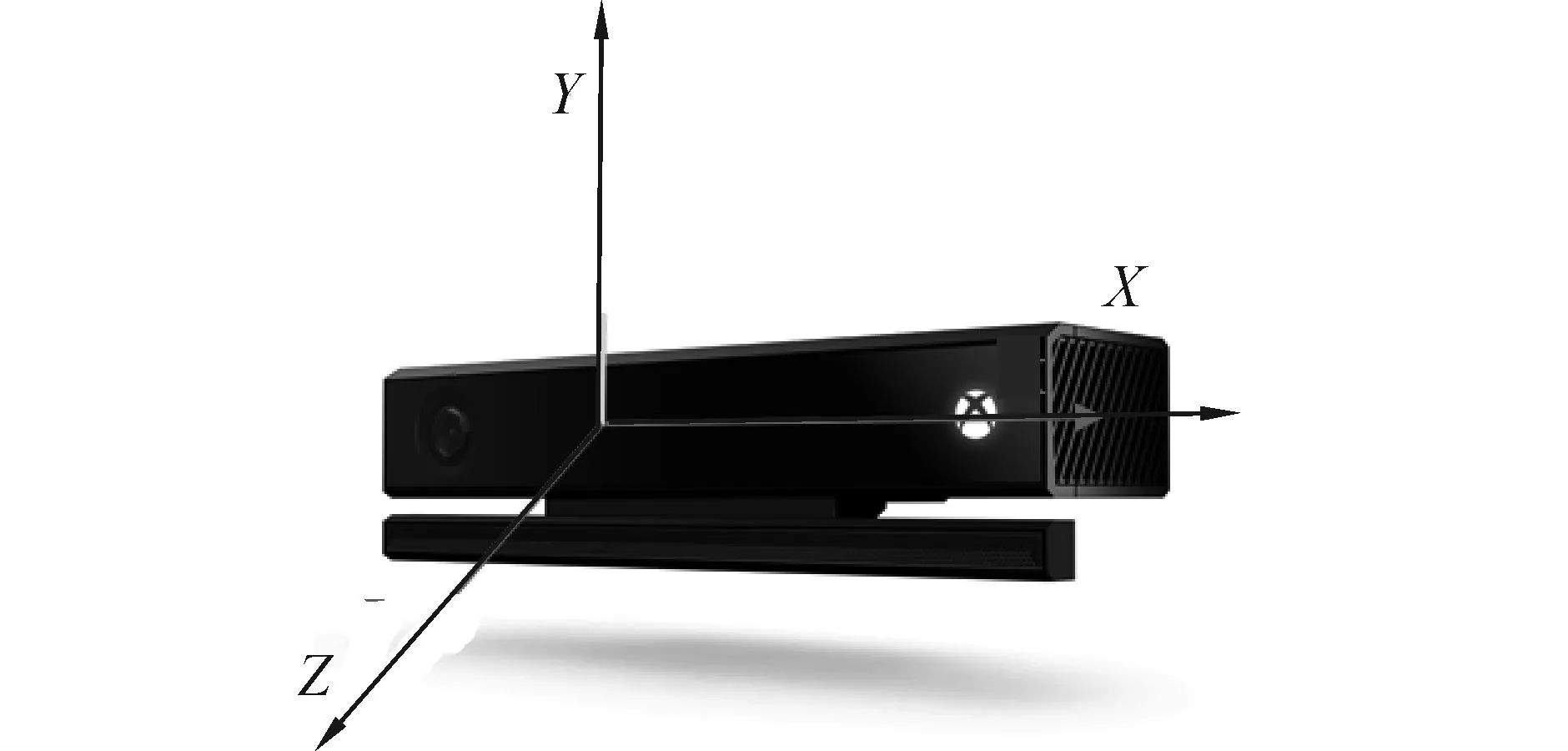
图3 Kinect的空间坐标系Fig.3 The space coordinate system of Kinect
2.2Nao机器人关节自由度与骨骼点的映射关系推导
仿人机器人Nao是Aldebaran Robotics公司开发机器人平台,具有25个自由度,共13个关节,右上肢的自由度如图4所示。由于Kinect采集的骨骼信息中均认定所有关节为质点,故末端关节的转动信息无法从Kinect提取的骨架信息中计算得到,因此忽略各关节的转动信息,推导出各关节对应的自由度及所需的Kinect骨骼点如表1所示。
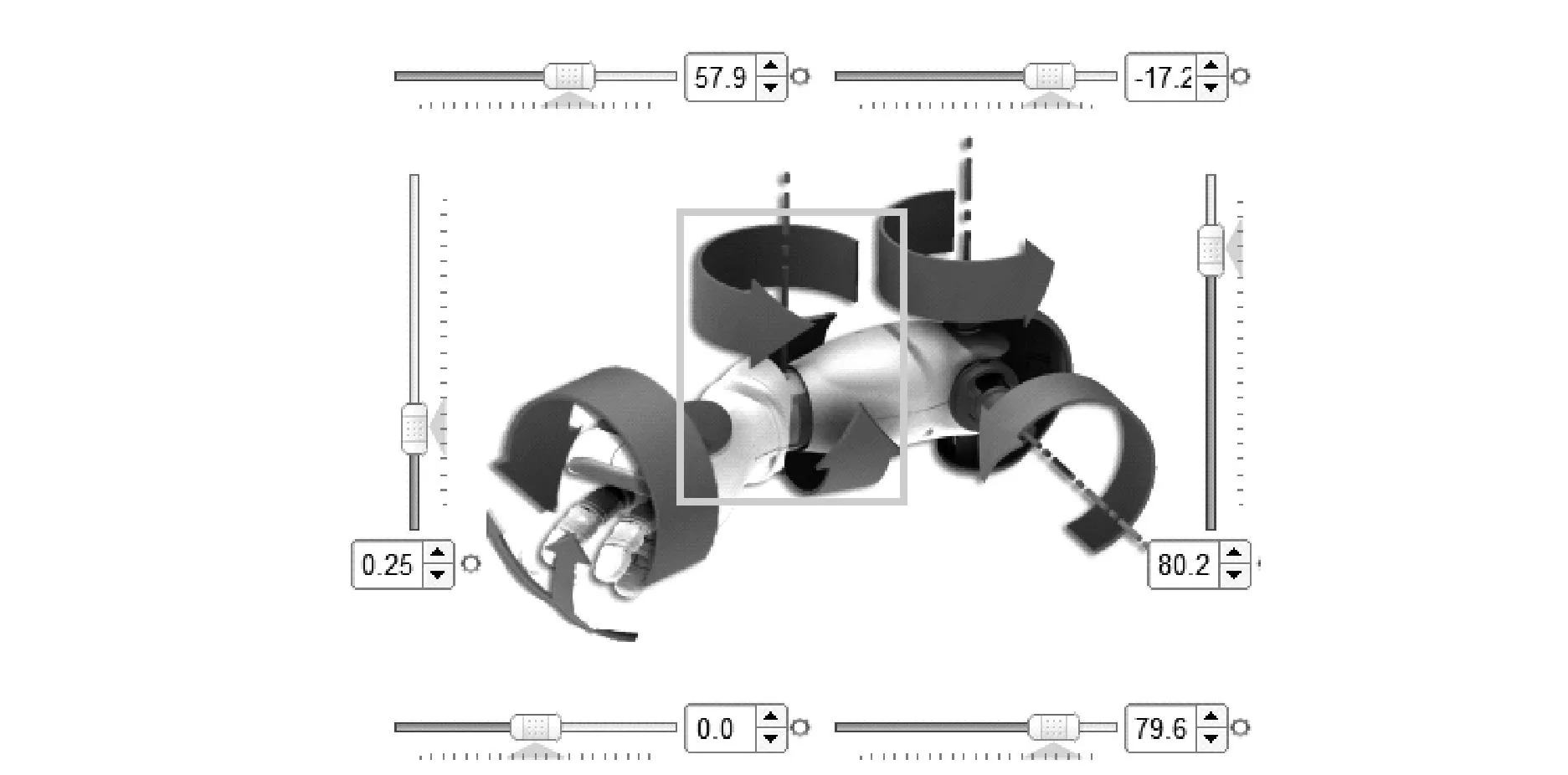
图4 Nao机器人右上肢自由度Fig.4 The DOF of right upper limb of Nao robot
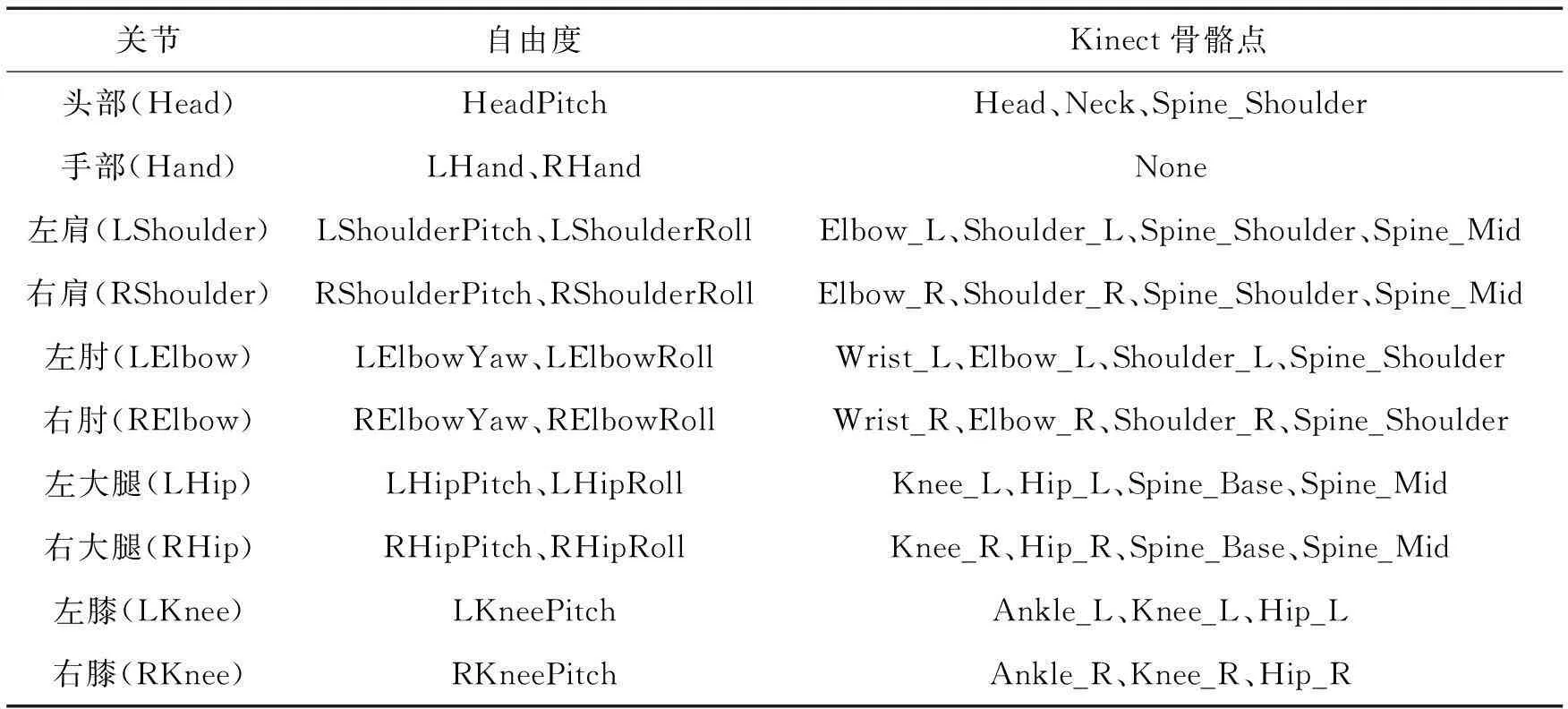
关节自由度Kinect骨骼点头部(Head)HeadPitchHead、Neck、Spine_Shoulder手部(Hand)LHand、RHandNone左肩(LShoulder)LShoulderPitch、LShoulderRollElbow_L、Shoulder_L、Spine_Shoulder、Spine_Mid右肩(RShoulder)RShoulderPitch、RShoulderRollElbow_R、Shoulder_R、Spine_Shoulder、Spine_Mid左肘(LElbow)LElbowYaw、LElbowRollWrist_L、Elbow_L、Shoulder_L、Spine_Shoulder右肘(RElbow)RElbowYaw、RElbowRollWrist_R、Elbow_R、Shoulder_R、Spine_Shoulder左大腿(LHip)LHipPitch、LHipRollKnee_L、Hip_L、Spine_Base、Spine_Mid右大腿(RHip)RHipPitch、RHipRollKnee_R、Hip_R、Spine_Base、Spine_Mid左膝(LKnee)LKneePitchAnkle_L、Knee_L、Hip_L右膝(RKnee)RKneePitchAnkle_R、Knee_R、Hip_R
2.3关节示教信息的获取
利用Kinect获取骨骼点三维坐标信息,生成关节向量,通过计算关节向量的夹角得到各关节控制角,以右肘翻滚角RElbowRoll和偏航角RElbowYaw(图4中方框部分)为例,对关节角的计算过程进行说明。由表1知,为求RElbowRoll和RElbowYaw的关节角需要Kinect提取的骨骼点有Wrist_R、Elbow_R、Shoulder_R,Spine_Shoulder,如图2所示,分别用p1、p2、p3、p4表示,设其三维坐标信息分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)、(x4,y4,z4)则有向量:

(1)
则关节角RElbowRoll为
((2)
记向量p3,4p2,3=p3p4×p2p3,则关节角RElbowYaw为
(3)
如表1所示,共15个自由度,其中,左肘偏航角LElbowYaw的计算与RElbowYaw类似,如式(3)所示,其余各自由度的计算与RElbowRoll类似,如式(2)所示,不同之处在于根据选取向量的方向不同,参照Nao机器人的各自由度角度变化范围,作取负、加减π/2或π的校正,如此,即可得到各自由度一系列角度变化信息,也即模仿学习的示教数据。为得到平滑稳定的运动轨迹,需对离散数据进行表征学习,作进一步的泛化处理,得到连续的运动轨迹。
3示教数据的表征与泛化
将各关节角的运动信息,即示教数据,分别利用GMM进行编码,实现表征学习,通过GMR进行数据重构,泛化输出,以得到连续模仿运动轨迹[8]。
3.1示教数据的表征与泛化
对任一自由度,设其第j个示教数据点为ξj={ξs,j,ξt,j},j={1,2,…,N},其中,N是单次示教包含的数据点的个数,ξs,j是关节角,ξt,j是时间值。假设每一个数据点ξj服从如下概率分布:
(4)
式中:p(k)是先验概率,p(ξj|k)是条件概率分布,服从高斯分布,于是,整个示教数据集合可以用高斯混合模型来表示,K即组成高斯混合模型的高斯分布的个数。
(5)
(6)
式中:D是编码示教数据的GMM的维度。因此,高斯混合模型需要确定的参数是{πk,μk,Σk},分别表示第k个成分的先验概率,期望和方差。采用EM算法估计GMM的参数,通过在概率模型中寻找参数最大似然估计进行参数学习[13]。

(7)
(8)

(9)
(10)
(11)

3.2实验设计与分析
示教者(人)做一套连贯的动作(包括抬臂、伸展、挥手等),经预处理后得到的上肢的9个自由度(包括双臂和头部)的角度变化信息,如图5所示。将这些数据加入到GMM进行编码,经表征学习后,利用GMR泛化输出,得到连续的运动轨迹,如图6所示,可知,经表征和泛化后,得到连续的运动轨迹,而且原始数据中的噪声得到很好的处理,波动性大大降低,稳定性增强。
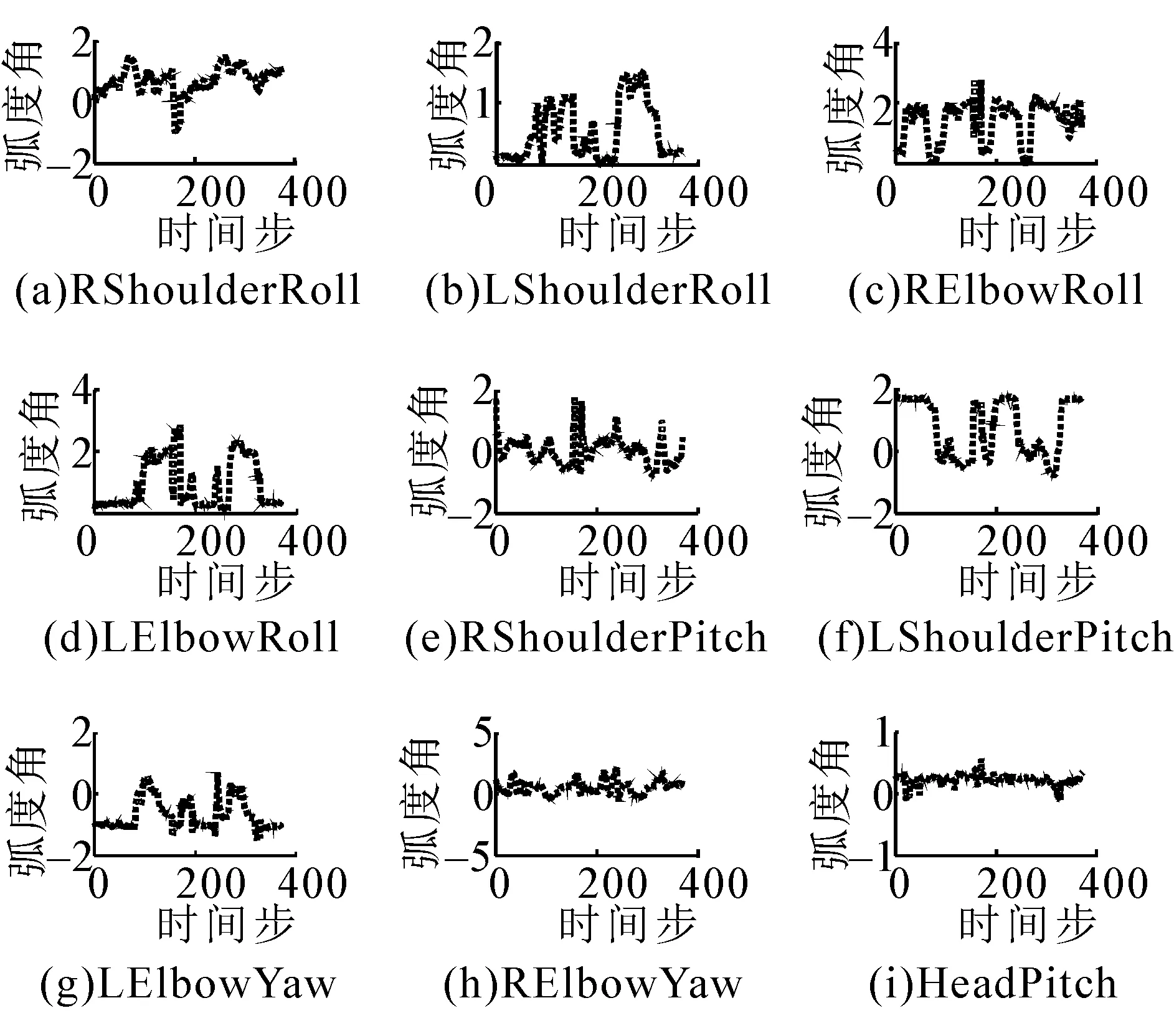
图5 示教数据的角度变化信息Fig.5 Angle change information of demonstration data
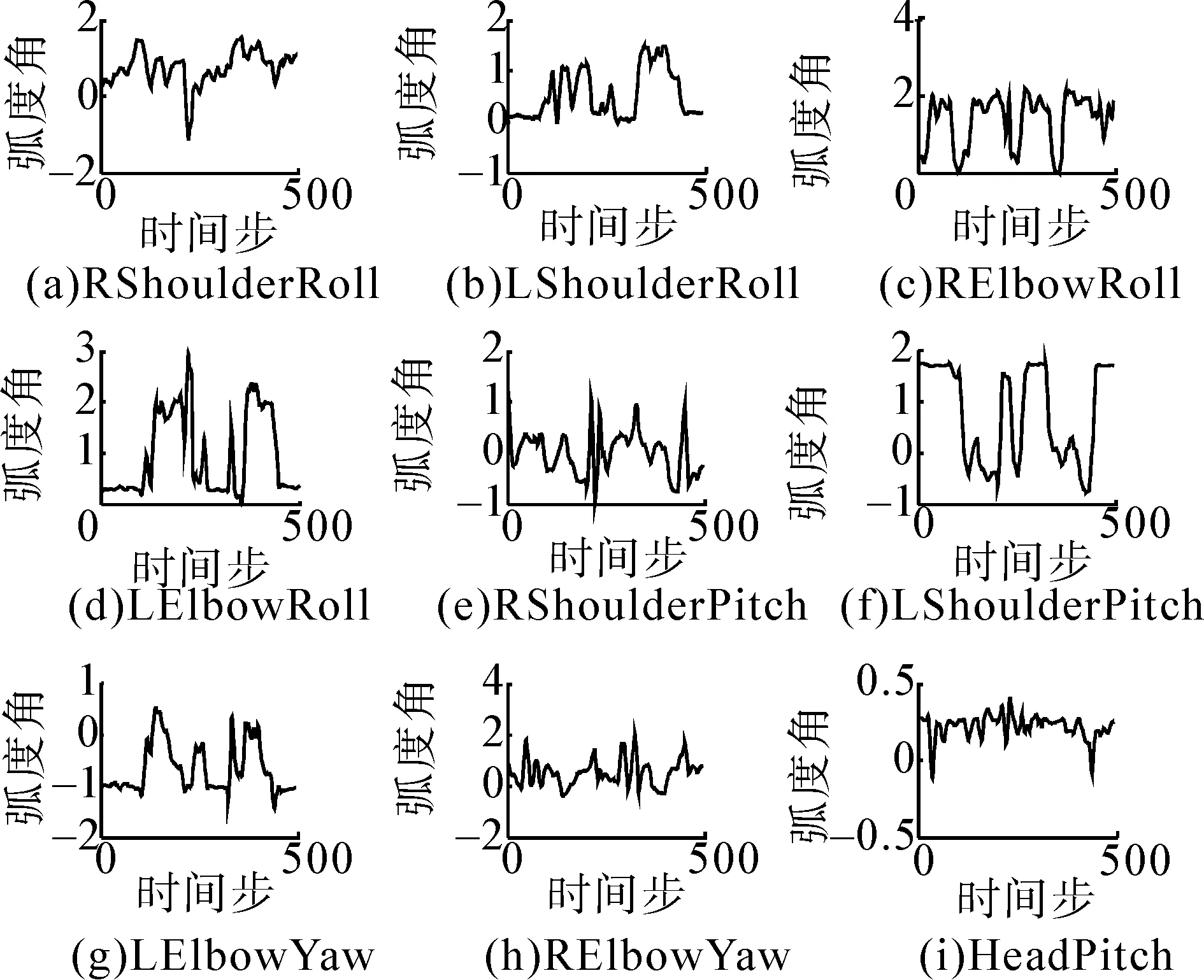
图6 经表征和泛化后的角度变化信息Fig.6 The angle change information of demo data after representation and generalization
以RShoulderRoll、RElbowRoll、RShoulderPitch3个自由度为例,对单次示教的表征和泛化过程进行说明,如图7所示,每列表示一个自由度,第1行是原始数据,第2行是GMM编码的结果,第3行实线是GMR泛化的输出,阴影表示协方差约束。
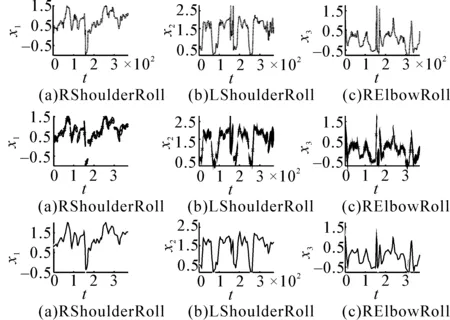
图7 单次示教的GMM编码和GMR泛化Fig.7 The output of single demonstration after encoding by GMM and generalization by GMR
在离线模式下,可以对多次示教进行学习,如图8所示,是对摆臂动作进行三次示教,以RElbowRoll自由度为例进行的说明,依次对应示教数据获取、表征编码及泛化输出的过程。对原始数据处理后得到示教数据,由图可知,GMM能对多次示教进行编码,利用GMR泛化出包含多次示教特征的输出,具有较强的噪声处理能力,如果某次示教过程中存在干扰或跳变,可编码多次示教的特性可对噪声进行自动过滤,泛化出最优轨迹。

图8 多次示教的GMM编码和GMR泛化Fig.8 The output of multi-demonstration after encoding by GMM and generalization by GMR
4基于模仿学习的Nao机器人行为动作的实现
Nao机器人的嵌入式软件NAOqi包含一个跨平台的分布式机器人框架,为开发人员提高、改进Nao的各项功能提供了一个良好的基础。本文构建的Nao机器人动作模仿系统,骨骼点信息采集及示教数据的获取采用C#语言开发实现,示教数据的表征与泛化基于MATLAB环境开发实现,将泛化得到的运动信息通过NAOqi进行数据的更新,映射到Nao机器人的底层控制中,实现动作模仿。
实验研究表明,构建的基于Kinect的Nao机器人动作模仿系统可以实现实时、离线两种方式的动作行为模仿,实时动作模仿展示如图9~12所示,对每一个子图,左边是示教者,右边是模仿者(Nao机器人),中间是计算机界面,包括Kinect采集到的人体骨骼信息和运用Nao机器人的开发套件NaoSim与Choregraphe,在虚拟环境下的动作模拟测试结果,其中,图9~11是基本动作的模仿,图9是双臂伸展动作,图10是双臂弯曲动作,图11分别表示头部自由度动作(低头)和手的状态模仿(右手闭合,左手张开),图12是复合动作,分别是挥手和武术起手式动作。
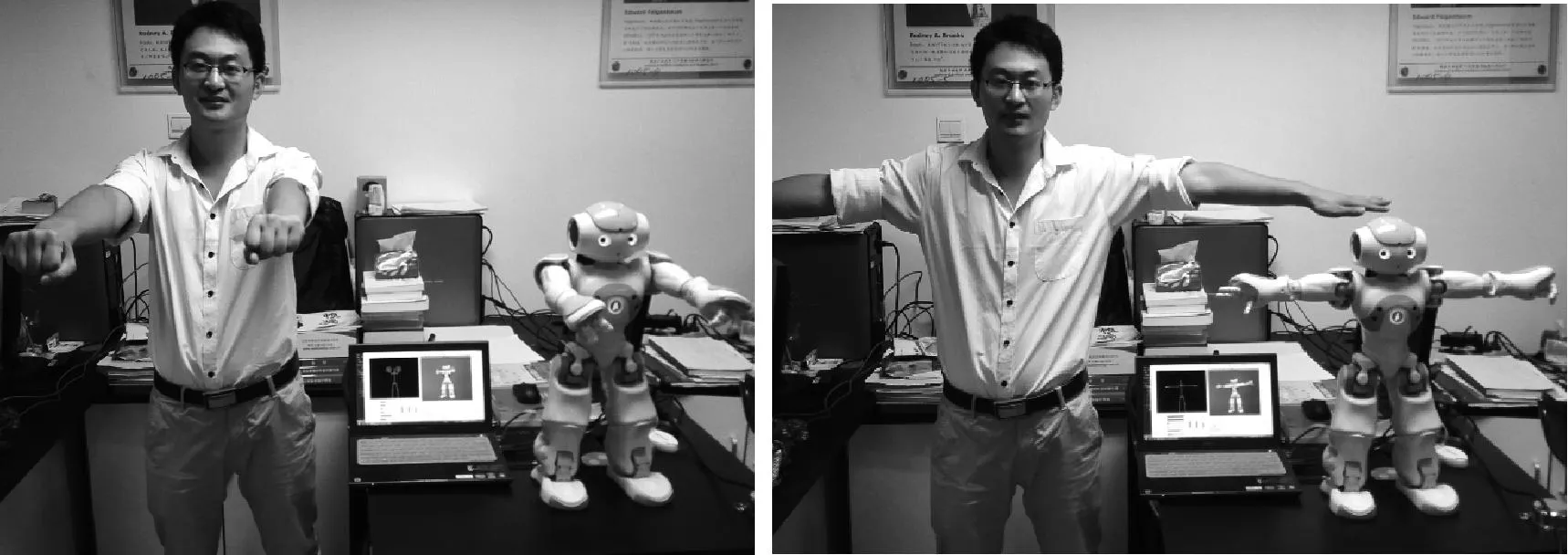
图9 双臂伸展动作Fig.9 The motion of stretching arms

图10 双臂弯曲动作Fig.10 Motion of bending arms

图11 低头及手的状态模仿Fig.11 Head drop and imitation of the state of hands

图12 复合动作Fig.12 Composite actions
基于模仿系统的灵活性和稳定性,该系统可用于实际操作任务,如图13所示,控制机器人将彩笔放入笔筒中,其中A~C是左手抓取动作,对应的细节图是a~c;D~E是将彩笔从左手交换到右手,细节对于d~e;F~H是右手将彩笔放入到右边透明笔筒中,细节对应f~h,整个过程较灵活稳定。基于模仿学习的框架,将Kinect与Nao机器人相结合实现的动作模仿系统,在上肢的动作模仿中效果较好,如图9~13所示,运动平滑稳定,能够用于执行实际任务。在线模式下,示教过程中,实时更新数据,动作的模仿是实时的。本系统还可以实现离线模式下的行为动作模仿,离线模式下,数据是在示教完成后,进行数据的更新。离线模式下,可以通过记录动作执行过程中各自由度角度的变化,实现动作学习的记忆,在环境和任务不变的情况下,实现学习到的动作(技能)重复执行,可将其应用于生产线上的重复性行为动作,通过示教-模仿的机制,可有效避免机器人底层的复杂编程。

图13 基于实时模仿的抓-放任务的实现Fig.13 The implementation of catch-put task based on real-time imitation
此外,可通过重采样不同数目的泛化输出点,实现对运动速度的控制,对于图6中的一套动作,经反复试验,采样500个数据点映射到机器人中时,运动轨迹较平滑自然,若采样200个点动作较快,而800个点,则动作较慢,更多的点则显得动作迟钝。
但是,目前该系统在下肢的动作模仿中实际效果不太理想,其原因在于下肢存在平衡问题,而该系统本质上是一开环系统,为解决下肢模仿的平衡考
虑引入内部传感实现闭环的控制。
5结论
本文将体态感知与仿人机器人相结合,研究机器人的模仿学习,并以该框架为指导,开发实现了基于Kinect的Nao机器人动作模仿系统。该系统在Nao机器人上肢的动作模仿中效果较好,运动平滑而自然,实验结果表明:
1) 通过Kinect采集骨骼点空间坐标,用于计算示教者运动过程的关节角变化信息的方法是可行的,能够为模型训练提供较好的数据支持。
2) 经GMM编码和GMR泛化后,能够得到连续的平滑运动轨迹,且原始数据中的噪声得到很好的处理,波动性大大降低,稳定性较好。
3) 在上肢的动作模仿中,运动较平滑稳定,能够用于复杂运动技能的学习,能够较灵活地执行遥操作任务,对面向搜救任务的机器人研究有一定的参考意义。
4) 在离线模式下,可实现动作记忆,进而实现动作的重复执行,而且可通过重采样方法对运动速度进行控制。
5) 不足之处在于,下肢存在平衡控制的问题,不能实现上下肢的协同运动。
下一步研究的方向是考虑引入闭环控制,解决下肢的平衡问题,实现上肢和下肢的协同动作,将整个系统应用于远程遥操作任务,提高其实用性。
参考文献:
[1]SCHAAL S. Is imitation learning the route to humanoid robots?[J]. Trends in cognitive sciences, 1999, 3(6): 233-242.
[2]BILLARD A, CALINON S, DILLMANN R, et al. Robot programming by demonstration[M]//SICILIANO B, KHATIB O. Springer Handbook of Robotics. Berlin Heidelberg: Springer, 2008: 1371-1394.
[3]ENGLERT P, PARASCHOS A, DEISENROTH M P, et al. Probabilistic model-based imitation learning[J]. Adaptive behavior, 2013, 21(5): 388-403.
[4]GRIBOVSKAYA E, KHANSARI-ZADEH S M, BILLARD A. Learning non-linear multivariate dynamics of motion in robotic manipulators[J]. The international journal of robotics research, 2011, 30(1): 80-117.
[5]LEE Sang H L, SUH I H, CALINON S, et al. Autonomous framework for segmenting robot trajectories of manipulation task[J]. Autonomous robots, 2015, 38(2): 107-141.
[6]ASFOUR T, AZAD P, GYARFAS F, et al. Imitation learning of dual-arm manipulation tasks in humanoid robots[J]. International journal of humanoid robotics, 2008, 5(2): 183-202.
[7]于建均, 韩春晓, 阮晓钢, 等. 基于高斯过程的机器人模仿学习研究与实现[J]. 北京工业大学学报, 2015, 41(7): 1000-1004.
YU Jianjun , HAN Chunxiao , RUAN Xiaogang, et al. Robot imitation learning based on Gaussian processes[J]. Journal of Beijing university of technology, 2015, 41(7): 1000-1004.
[8]CALINON S. Robot programming by demonstration: a probabilistic approach[M]. Lausanne: EPFL Press, 2009: 75-100.
[9]赵姝颖, 徐文杰, 郑雪林, 等. 基于体感的机器人展示系统研究与开发[J]. 机器人技术与应用, 2012(6): 54-57.
ZHAO Shuying, XU Wenjie, ZHENG Xuelin, et al. research and development of display system of Nao humanoid robot based on posture perception[J]. Robot technique and application of robot, 2012 (6): 54-57.
[10]ALMETWALLY I, MALLEM M. Real-time tele-operation and tele-walking of humanoid Robot Nao using Kinect Depth Camera[C]//Proceedings of the 10th IEEE International Conference on Networking, Sensing and Control (ICNSC). 2013 10th IEEE International Conference on Evry, France: IEEE, 2013: 463-466.
[11]KOENEMANN J, BENNEWITZ M. Whole-body imitation of human motions with a Nao humanoid[C]//Proceedings of the 7th ACM/IEEE International Conference on Human-Robot Interaction (HRI).2012 7th ACM/IEEE International Conference onBoston, MA, USA: IEEE, 2012: 425-425.
[12]YANG Ningjia, DUAN Feng, WEI Yudi, et al. A study of the human-robot synchronous control system based on skeletal tracking technology[C]//Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 2013: 2191-2196.
[13]BISHOP C M. Pattern recognition and machine learning[M]. New York: Springer, 2006: 423-455.

于建均,女,1965年生,副教授。主要研究方向为智能机器人的仿生自主控制、智能计算与智能优化控制、复杂过程建模、优化与控制。主持或参与国家“863”计划项目、国家自然科学基金等省部级科研项目以及横向科研课题多项;发表SCI、EI、ISTP收录论文40余篇,获国家发明专利、实用新型专利、国家软件著作权等10余项。
门玉森,男,1991年生,硕士研究生,主要研究方向为机器学习、机器人技术。参与国家自然基金项目,发表学术论文3篇,获发明专利1项。

阮晓钢,男,1960年生,教授,博士生导师,主要研究方向为人工智能与认知科学、机器人学与机器人技术、控制科学与工程等。主持科研课题20余项,发表学术论文400余篇,其中,被SCI和EI和ISTP检索200余次,获得多项国家发明专利、实用新型专利等。
The research and implementation of behavior imitation system about Nao robot based on Kinect
YU Jianjun, MEN Yusen, RUAN Xiaogang, ZHAO Shaoqiong
(College of Electronic and Control Engineering,Beijing University of Technology, Beijing 100124, China)
Abstract:To avoid the complexity of the underlying motor control, make the robot realize motor skills through learning and improve its intelligence, Combining Somatosensory perception with humanoid robot Nao,this paper focuses on the research of robot imitation learning,constructs the behavior imitation system and implements Nao robot's motion imitation using kinect based on the framework of imitation learning.By means of the skeleton tracking technology of motion-sensing camera,the bone point information is collected,then be pre-processed into demonstration data.The demonstration data is encoded for representative learning through Gaussian mixture model (GMM),and then the output generalized by Gaussian mixture regression (GMR) is mapped to Nao robot to realize the imitation of action.The experiment results indicate that Nao robot is able to implement behavior imitation in real-time and offline mode and gives good effect owing to the fact that the motion trajectory is smooth and stable.
Keywords:imitation learning; robot control; somatosensory perception; probability model; GMM; GMR
作者简介:
中图分类号:TP242.6
文献标志码:A
文章编号:1673-4785(2016)02-0180-08
通信作者:门玉森. E-mail:menyusen0927@163.com.
基金项目:国家自然科学基金项目(61375086);高等学校博士学科点专项科研基金项目(20101103110007).
收稿日期:2015-11-23. 网络出版日期:2016-03-14.
DOI:10.11992/tis.201511020
网络出版地址:http://www.cnki.net/kcms/detail/23.1538.TP.20160314.1432.006.html
猜你喜欢
中学生数理化(高中版.高考数学)(2022年3期)2022-04-26
语数外学习·高中版下旬(2021年8期)2021-11-13
甘肃科技纵横(2021年5期)2021-07-27
中学生数理化·高一版(2021年3期)2021-06-09
卷宗(2017年27期)2018-02-03
经济研究导刊(2017年25期)2017-11-01
东方教育(2017年9期)2017-07-19
中学生数理化·中考版(2015年10期)2015-09-10
初中生世界·八年级(2014年4期)2014-05-09
数学教学通讯·初中版(2014年2期)2014-03-21
