光学导航在舱器分离监视中的应用
2016-05-24 07:49张鹏,贾敏
载人航天 2016年2期
关键词:图像处理
张 鹏,贾 敏
(北京航天飞行控制中心,北京100094)
光学导航在舱器分离监视中的应用
张 鹏,贾 敏
(北京航天飞行控制中心,北京100094)
摘要:针对嫦娥5T1再入返回飞行试验任务中的服务舱、返回器分离监视问题,研究了利用服务舱分离监视相机图像进行舱器距离判断的方法。首先根据舱器分离点预报得到标称轨道;其次构建了观测模型并阐述了导航系统的滤波算法;然后对分离监视相机图像进行二值化处理和边缘提取,得到返回器的像元像素信息;最后利用扩展卡尔曼滤波算法对返回器相对位置、速度进行实时解算。舱器分离的可靠监视对判断分离,返回器安全预警,乃至及早发现故障辅助飞控决策具有重要的意义,其基本原理和流程也可作为星上自主光学导航的参考。
关键词:光学导航;舱器分离;图像处理
1 引言
为了降低探月三期工程风险,按照工程研制总要求,安排了一次嫦娥五号返回器的高速返回再入飞行试验,模拟接近于真实飞行过程的返回再入条件,验证返回再入气动与防热技术、跳跃式返回再入GNC技术等关键技术,确保返回器技术方案的可行性和正确性,为探月三期正式任务方案设计提供支持[1]。飞行试验器由服务舱和返回器两部分组成,在距离地面5000 km高度处,利用分离弹簧产生相对速度,返回器与服务舱分离。相同的分离高度,两器分离后的相对距离与分离速度有关,分离速度越小,到达再入点时两器的相对距离越小。舱器分离的可靠监视对判断分离、返回器安全预警乃至及早发现故障辅助飞控决策具有重要的意义。然而,依靠地面测定轨,无法在5000 km高度上准确实时地分辨两器的相对距离、相对速度。
为了可靠监视舱器分离过程,本文利用服务舱搭载的分离监视相机图像提取返回器的位置信息,即把光学导航技术的基本原理应用在舱器分离的准确监视中。实际上,光学导航以其自主性、实时性等独特的优势弥补了地面测控存在大时延和不可见弧段的缺陷,逐渐成为深空探测任务的重要组成部分[2]。而我国的深空探测光学自主导航尚处在预研阶段。一般来说,在深空探测中应用光学自主导航,主要涉及目标天体识别及图像处理,观测信息提取,滤波及轨道确定等关键技术,而通过图像处理获取足够有用的观测信息是应用的前提[3],需要大量的理论探索和实验验证,才能真正在实际中应用。崔平远等人分析了深空自主导航的可观测性[4]。崔文等人研究了基于小行星观测的火星探测巡航段的自主光学导航方法[5]。张鹏等人研究了火星接近段光学导航的基本原理及关键技术,并在此基础上进行了半物理仿真验证[6]。嫦娥五号再入返回飞行试验器虽然没有应用自主光学导航技术,但是基于事后数据分析,可以进行相关技术的试验和论证[1]。本文采用的基本原理和流程均适用于星上实时自主导航,考虑到自主导航具有降低任务风险、提高任务鲁棒性的优点,本文的研究成果可以为后续的工程研制提供参考。
2 分离过程
首先建立服务舱分离时刻的质心坐标系,服务舱的舱器分离姿态为:服务舱+X轴指向飞行反方向,与-V(V为服务舱速度方向)方向的夹角约30度,指向地球一侧;+Z轴位于轨道平面内,并指向地球一侧,如图1所示。
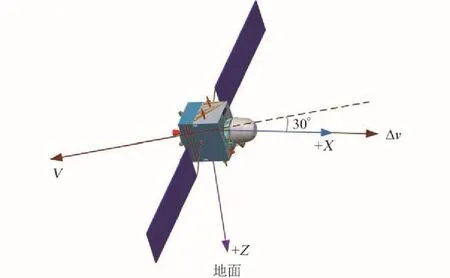
图1 舱器相对分离方向示意图Fig.1 Separation of the return module with respect to the service module
为便于描述目标相对于探测器的方向,定义探测器VNC(前左上)坐标系为:X轴指向探测器速度方向,Y轴指向轨道法向,Z轴由右手系确定,对于5000 km的分离高度,按照0.6 m/ s的相对分离速度,分离后的相对距离和相对运动分别如图2和图3所示。在初分离的1 min内,相对运动近似为匀速直线运动。
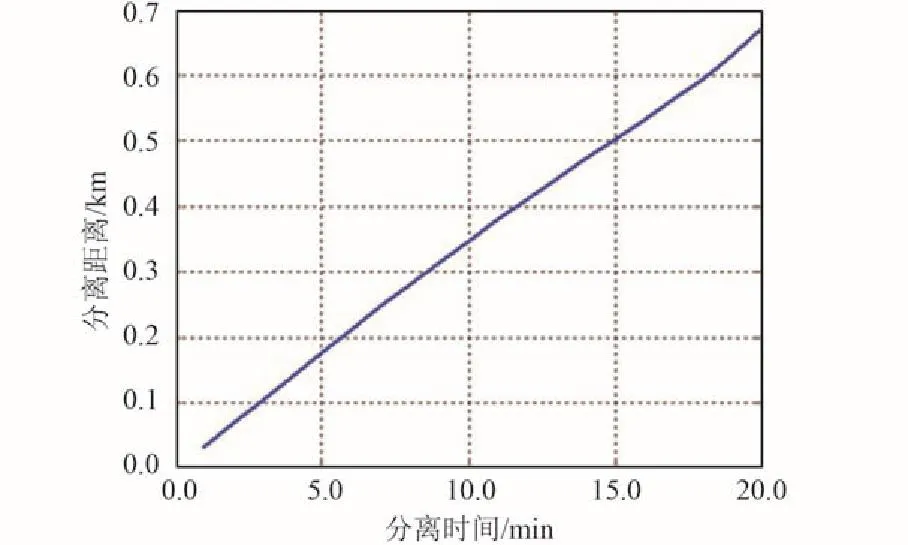
图2 服务舱与返回器的相对距离Fig.2 Relative distance of the service module with respect to the return module
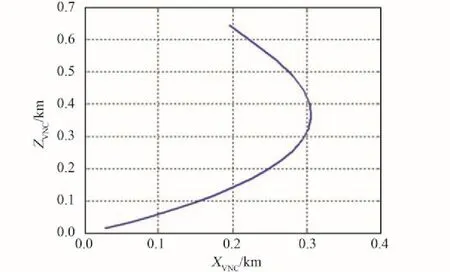
图3 服务舱相对返回器的运动曲线Fig.3 Relative position of the service module with respect to the return module
为了监视这一重要过程,服务舱正+X面安装了两部分离监视相机,利用相机图像可以直观地判断两器的分离过程。为了分析分离过程,本文主要采用监视相机A的图像。
分离监视相机A机械坐标系(Ocs⁃XcsYcsZcs)定义为:坐标原点位于成像平面中心,Zcs与服务舱顶板夹角α,Ycs与服务舱YIC轴夹角β,与ZIC轴夹角γ,Xcs与Ycs和Zcs构成右手坐标系。为了便于图像处理,在服务舱上顶面建立监视坐标系,并在此坐标系中监视返回器的相对运动。监视坐标系原点位于上顶面中心,Y轴与监视相机A坐标系Ycs轴平行且指向相同,Z轴指向返回器,X轴构成右手坐标系。如此,监视坐标系到监视相机A坐标系的转换矩阵如式(1):
需要指出的是,这些数据来自型号部门的各类设计报告,与飞行试验器的实际安装参数存在一定的偏差,在导航过程中要作为观测误差进行初步的估计。
3 自主导航流程
对拍摄到的返回器图像进行处理,可以得到包含返回器相对于服务舱分离监视相机矢量的像元像素以及返回器的图像大小信息。结合探测器动力学模型,对光学图像进行滤波处理,进一步得到返回器在服务舱相机坐标系下的位置速度,本节对关键技术进行逐一描述。
3.1 图像处理
图像采集完成后,需要提取光学图像中有效的像元像素信息。首先进行边缘检测,使用Canny算子,对图像进行二值化处理得到边缘点集合。其次,在返回器成像区域内(如图4.b中方框所示),提取返回器大底左右两侧最外侧的点坐标,作为导航点(如图4.b中交叉标记)。
3.2 观测模型
监视相机A在监视坐标系中的坐标为(a, b, c)监视坐标系中,返回器大底圆心在相机拍摄时刻的位置为(x y z)T,大底直径为D,那么两个导航点相对于监视相机机械坐标系的方向矢量分别如式(2)、(3):
本文中,光学导航的目的在于确认分离状态,舱器分离后的短时间内,两器姿态停控,相对姿态稳定,因此观测模型没有考虑相对姿态,而是将其作为测量误差,与其他噪声一并考虑对估值的影响。
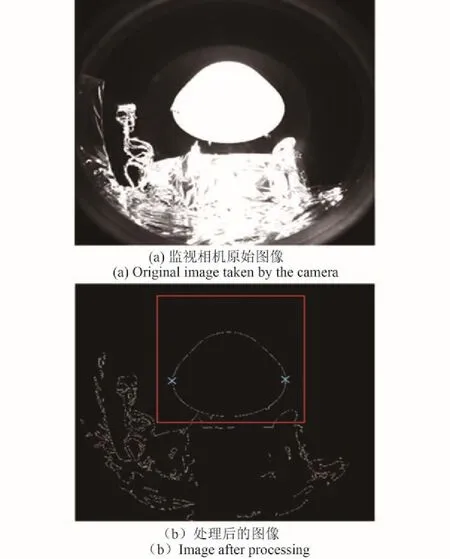
图4 监视相机拍摄图像处理前后Fig.4 Before and after image processing
将矢量n向相机焦平面投影,可得式(4):

其中,f为光学相机的焦距,值为2.7 mm。在不考虑相机电磁畸变和光学畸变的情况下,相机像元像素如式(5):
其中, K=diag(Kx, Ky)表示从毫米到相机像素的转换矩阵,单位为pixel/ mm;p0,l0表示相机光轴与像平面的交点,假设中心点像素为零,即p0=0,l0=0。考虑到测量过程中的误差,导航系统的观测模型可表示为式(6):
其中,R表示返回器成像半径,Rf表示返回器大底半径,ν表示光学相机的测量噪声。
3.3 滤波算法
为了确认返回器正常分离再入,需要实时判断舱器分离状态,因此适合采用序贯滤波算法,对状态进行实时更新。EKF是深空探测中应用较为广泛和成熟的算法之一,在NASA的Deep-Space1[7]和STARDUST[8]任务导航系统中均有成功的应用。EKF的基本思想是将非线性状态方程和测量方程在状态预测值附近进行线性化,然后根据卡尔曼滤波理论对状态进行更新。
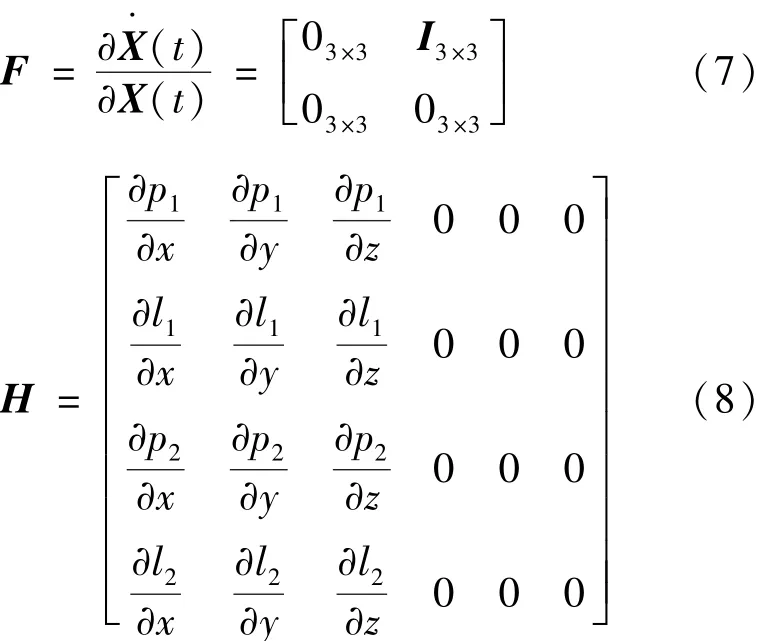
由于观测方程是状态变量的非线性函数,因此首先需要将观测方程线性化,而由于仅考虑短时间内的相对运动,动力学方程可以采用匀速直线运动方程近似,从而得到式(7)~(8)所示的关于状态X(t)的Jacobi矩阵F和观测矩阵H:
EKF流程如下:
1)时间更新
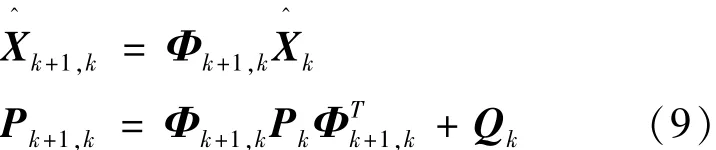
其中, Qk是系统状态的噪声协方差矩阵,Φk+1,k表示从第k步到第k+1步的状态转移矩阵,可得式(10):

2)测量更新
根据观测矩阵和噪声协方差矩阵计算得测量增益矩阵如式(11):

其中, Rk+1是测量噪声的协方差矩阵;Hk+1是第k+1步观测矩阵。
3)状态和协方差矩阵修正

其中, Zk+1是实际观测数据。
4 仿真结果及验证
利用分离后监视相机所拍摄图像,采用该方法进行舱器分离过程的分析。导航滤波的P阵——即状态变量的初始协方差矩阵,设置为对角阵,对角元素取初始的位置、速度误差的平方;导航滤波的Q阵——即系统状态的噪声协方差矩阵,根据动力学模型误差给出,由于服务舱和返回器距离很近,地球中心引力及非球形摄动基本上相同,而光压的影响在舱器分离的短暂时间内不足以体现,本文将Q阵前三个对角元素设为1.0×10-17;导航滤波的R阵——即测量误差的协方差矩阵,与相机安装及图像处理环节有关,文中相机坐标系X方向误差取8个像素,Y方向取5个像素,故而R阵设为diag (64, 25, 64, 25)。
给定相对位置初值(0, 0, 1)m和相对速度初值(0, 0, 0.6)m/ s,导航结果如图5和图6所示,其中图5给出了舱器距离随时间的变化,图6给出了返回器相对服务舱的速度,两图横坐标均为相对第一幅图像的相对时间,每个点间隔0.25 s(每秒4帧图像)。可以看到,相对距离近似线性变化,而相对速度在导航初期有较大的波动,之后逐渐减小,仍然没有收敛,需要进一步分析。
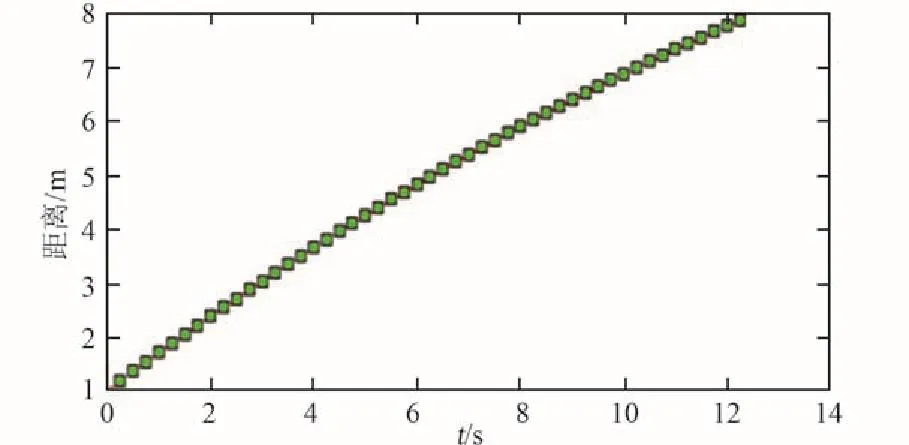
图5 返回器相对服务舱距离导航结果Fig.5 Relative distance of the return module with respect to the service module
由于观测量通过返回器的像元像素直接反映的是返回器与服务舱的相对位置信息,而没有相对速度信息,仅通过动力学方程与速度量间接关联,即受到速度量的约束较弱,因此对速度量的改正作用也有限。速度估值精度受限于观测量的精度,且随着导航过程误差会逐步积累而导致结果发散。
为了进一步辨识分离速度,下面采用最小二乘法进行批处理,如对单点测量距离进行线性拟合,估计分离速度,即利用运动学估值。图7给出了利用监视相机A估计的舱器距离值,线性拟合结果为y=0.538x+0.7687,即舱器分离速度为0.538 m/ s,置信度为0.9994。可见,序贯处理对相对位置的估计偏差较小,而相对速度估值虽然在后期接近“真值”,但是没有收敛,仅能在量级上作为参考。

图6 返回器相对服务舱速度导航结果Fig.6 Relative velocity of the return module with respect to the service module
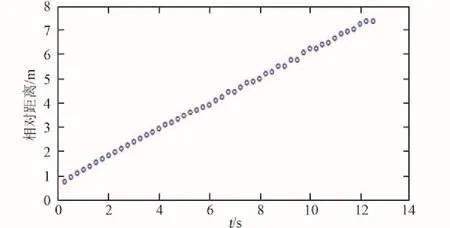
图7 返回器相对服务舱距离估计Fig.7 Relative distance estimation of the return module with respect to the service module
在深空探测光学自主导航中,探测器与目标的相对速度事先是无法准确判断的,仅能依靠地面测轨得到粗略的初值。为了验证该算法的可行性,分别利用(0, 0, 0.3)m/ s,(0, 0, 0.5)m/ s, (0, 0, 0.8)m/ s作为导航初值,即在不知道准确分离速度的情况下进行两器相对速度的估算,得到的滤波结果如图8所示,选择不同的相对速度初值,导航结果基本上一致。可见,在一定范围内,该算法不依赖于导航初值的选取,具有一定的鲁棒性,且计算量很小,采用2.4 GHz双核CPU, 2G内存的计算机仿真全程导航流程仅需150 μs,满足星上实时应用的要求。
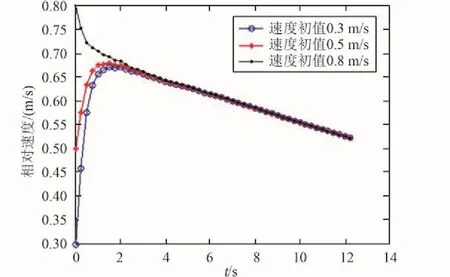
图8 返回器相对服务舱速度估计(不同初值)Fig.8 Relative distance of the return module with respect to the service module(different initial values)
5 结论
本文基于光学导航原理,利用服务舱搭载的分离监视相机进行舱器分离阶段返回器的相对位置、速度的实时估计,验证了光学导航在舱器分离监视中的可行性,对工程研制有一定的参考价值。
由于返回器的相对运动轨迹偏离光轴,导致边缘提取困难,侧光的光照条件也会带来一定的误差。另外,图像的光学畸变和电磁畸变,以及舱、器的姿态波动也会导致图像处理结果不理想,影响导航定位精度,甚至导致算法难以收敛。因此,如果在任务中采用自主导航,成像条件需要进一步的模拟,如果边缘不明显,则需要选取返回器上的特征点与图像进行匹配,获取足够的导航信息。
参考文献(References)
[1] 杨孟飞,张高,张伍,等.探月三期月地高速再入返回飞行器技术设计与实现[J].中国科学:技术科学, 2015, 45(2):111-123.Yang Mengfei, Zhang Gao, Zhang Wu, et al.Technique design and realization of the circumlunar return and reentry spacecraft of 3rd phase of Chinese lunar exploration program [J].Sci Sin Tech, 2015, 45(2):111-123.(in Chinese)
[2] 吴伟仁,王大轶,宁晓琳.深空探测器自主导航原理与技术[M].北京:中国宇航出版社, 2011:27-28.Wu Weiren, Wang Dayi, Ning Xiaolin.The principle and technology of deep space autonomous navigation[M].Beijing:China Astronautics Publishing House, 2011:27-28.(in Chinese)
[3] Lightsey G E, Christian J A.Onboard image-processing algorithm for a spacecraft optical navigation sensor system[J].Journal of Spacecraft and Rockets, 2012, 49(2):337-352.
[4] 崔平远,常晓华,崔祜涛.基于可观测性分析的深空自主导航方法研究[J].宇航学报, 2011, 32 (10):2116-2123.Cui Pingyuan, Chang Xiaohua, Cui Hutao.Research on observability analysis-based autonomous navigation method for deep space[J].Journal of Astronautics, 2011, 32 (10):2116-2123.(in Chinese)
[5] 崔文,宝音贺西,李俊峰.利用小行星视线矢量的火星探测光学自主导航研究[J].力学学报, 2012, 44 (6):1075-1078.Cui Wen, Baoyin Hexi, Li Junfeng.Research on optical autonomous navigation for Mars exploration based on asteroids’light-of-view[J].Chinese Journal of Theoretical and Applied Mechanics, 2012, 44(6):1075-1078.(in Chinese)
[6] 张鹏,宝音贺西,崔文,等.火星接近段的光学自主导航及半物理仿真[J].光学精密工程, 2012, 20(12增刊):311-319.Zhang Peng, Baoyin Hexi, Cui Wen, et al.Autonomous optical navigation for Mars-approaching phase and its simulation [J].Optics and Precision Engineering, 2012, 20(S12):311-319.(in Chinese)
[7] Bhaskaran S, Riedel J E, Synnott S P, et al.The deep space 1 autonomous navigation system:a post-flight analysis[C]/ / AIAA/ AAS Astrodynamics Specialist Conference, Denver, 2000.
[8] Bhaskaran S, Riedel J E, Synnott S P.Autonomous nucleus tracking for comet/ asteroid encounters:the stardust example [C]/ / Aerospace Conference, 1998 IEEE.IEEE, 1998, 2:353-365.
Application of Optical Navigation in Monitoring Module Separation
ZHANG Peng,JIA Min
(Beijing Aerospace Control Center,Beijing 100094,China)
Abstract:The feasibility and strategy of optical navigation technique in monitoring the module separation in the Chang′E-5T1 reentry mission was studied.Firstly,the mission was briefly introduced including the trajectory design and flight procedure.Then,the observation model was developed and the filtering algorithm was investigated.Next,the images of the monitoring camera were processed into binary images and the edges were detected using the canny method,from which the observation data was further acquired.In the end,the relative position and velocity were solved using the extended Kalman filter and compared with the designed indexes.It is proved that the navigation method is effective for this mission and may benefit to the deep space exploration.
Key words:optical navigation;module separation;image processing
作者简介:张鹏(1987-),男,硕士,工程师,研究方向为深空探测任务设计与飞行控制。E-mail:peng.zhang.thu@gmail.com
收稿日期:2015-07-06;修回日期:2015-10-19
中图分类号:V474.6,V412.4
文献标识码:A
文章编号:1674-5825(2015)06-0210-06
猜你喜欢
农业工程学报(2022年7期)2022-07-09
网络安全与数据管理(2022年2期)2022-05-23
电脑知识与技术(2022年9期)2022-05-10
现代临床医学(2022年2期)2022-04-19
计算技术与自动化(2022年1期)2022-04-15
科技传播(2019年22期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2018年18期)2018-11-14