轮腿式可移动载人月面着陆器概念设想
2016-05-24 07:49张志贤果琳丽叶培建
载人航天 2016年2期
张志贤,梁 鲁,果琳丽,叶培建
(中国空间技术研究院载人航天总体部,北京100094)
轮腿式可移动载人月面着陆器概念设想
张志贤,梁 鲁,果琳丽*,叶培建
(中国空间技术研究院载人航天总体部,北京100094)
摘要:为提高月面探测的机动范围和探测能力,提出了一种新型轮腿式可移动载人月面着陆器方案设想,综合载人月面着陆器和月球车的能力,具备轮式高速移动和腿式高效避障的优点,支持月面着陆和起飞任务的执行,支持较大范围的机动作业,支持月球基地构建和运营,满足载人登月以及月球基地任务的应用需求;提出了轮腿式可移动载人月面着陆器所涉及的关键技术,可作为后续开展深入研究的参考。
关键词:轮腿式;可移动式;载人月面着陆器
1 引言
在各种已实施、正在实施或停留在概念阶段的登月计划中,月面着陆器均是整个登月任务的特色和亮点之一。
载人月面着陆器是实现将航天员、载荷送往月球表面,支持航天员月面活动和科学试验以及搭载航天员实现月面起飞返回等任务的飞行器。阿波罗计划[1-2]、苏联登月计划和星座计划短期任务月面着陆器的最新一轮状态均采用了固定式月面着陆设计(着陆后着陆器位置即固定)[2-5]。在阿波罗计划的后期任务中还在着陆器上为航天员配备了月球车,进而形成了固定式月面着陆器与月球车组合的登月模式。在实际飞行任务中,这种登月模式也得到了验证,月球车的加入拓展了航天员的活动范围,提升了探测活动的效率[1]。然而,固定式着陆器与月球车组合的模式还存在一定的局限性,并且随着持续性登月任务的开展,以及在未来载人月球基地任务中,这种模式的局限性将更为明显,主要体现在:1)月球车往返的探测模式使得探测线路重复;2)受限于环控生保的支持能力,探测范围有限;3)着陆后,着陆器的姿态无法调整,不利于建立上升级起飞的最佳条件;4)对于载人月球基地任务,不具备移动能力的着陆器对着陆点的选择和着陆精度要求更加苛刻。
本文提出了一种新型的轮腿式可移动载人月面着陆器方案设想,将月面着陆器的月面下降、着陆和起飞能力与月球车的月面机动能力相结合,满足航天员月面着陆、生活和工作的同时,可执行更大范围的机动作业,支持月球基地构建和运营,是一种新型的月面着陆器设计思路。
2 移动式载人着陆器发展
以美国星座计划体系为指引,多个研究机构提出了移动式月面着陆器和火星着陆器的概念并拓展移动式着陆器的任务模式,提升概念的附加值。通过各种研究可以表明,随着航天技术的不断发展和人类对月球、火星探测需求的不断提升,移动式载人着陆器将是未来开展月球乃至火星探测任务重要的方向之一。
2.1 Lockheed Martin可移动月面着陆器概念
2004年,Lockheed Martin公司参与了NASA的探索系统体系研究,主要进行着陆器的概念设计和总体方案设计,主要对着陆器推进剂体系、构型进行了研究,同时提出了可移动月球着陆器设想,但仍停留在概念阶段。Lockheed Martin对月球着陆器移动能力的需求进行了简略的归纳,并主要提出了2种可移动载人月面着陆器概念。其中一种月面着陆器整体具备轮式运动系统,如图1所示,月面着陆器整器实现月面软着陆和月面移动;另一种月面着陆器仅在上升级上配备轮式运动系统,如图2所示,月面下降减速过程中将主减速推进系统分离掉,上升级单独完成软着陆并实现在月面的移动[6]。
2.2 Boeing火星着陆器概念
Boeing公司发布的火星探测飞行器架构,采用近地-环火交会对接方式实现4人落火的任务,火星表面驻留时间480天。每一次的火星任务中包括4个火星着陆器,其中含3个货运着陆器MCL(Mars Cargo Lander)和1个载人着陆器MPL (Mars Personal Lander),如图3所示。3个货运着陆器中分为两种,一种是载有居住舱的居住型着陆器MCL-H(Mars Cargo Lander–Habitat Variant, 2个),另一种实际上是大型的增压月球车MCL-R(Mars Cargo Lander-Rover Variant)[7-8]。
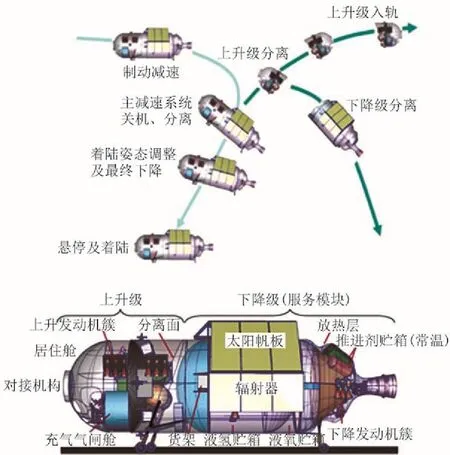
图1 Lockheed Martin整器可移动系统[6]Fig.1 The design of mobile system on integral lander by Lockheed Martin[6]
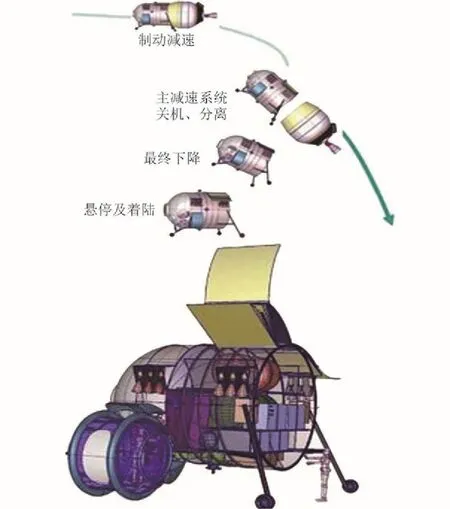
图2 Lockheed Martin上升级可移动系统[6]Fig.2 The design of mobile system on ascent module by Lockheed Martin[6]
载人火星着陆器搭载了可以支持81人天任务的生命保障系统和消耗品。3个火星货运着陆器在设计上与载人火星着陆器进行对接,如图4所示,从而可以在火星表面形成一个基地。每个居住性的火星货运着陆器或可移动的漫游型货运着陆器可以提供630人天的消耗品。4个着陆器组合起来所能提供的生命保障能力将足够支持4人航天员乘组进行长达16个月的火星表面驻留作业[6-7]。
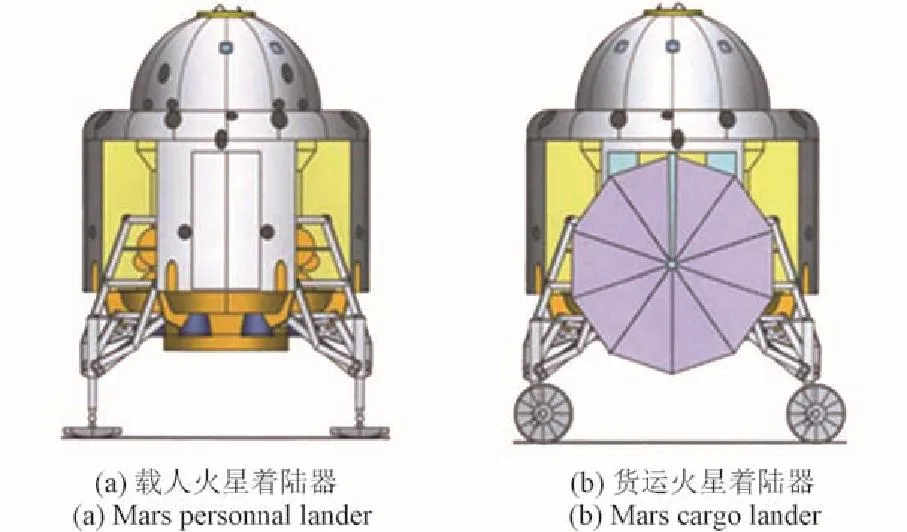
图3 Boeing火星着陆器概念[8]Fig.3 Conceptual design of Mars lander by Boeing[8]
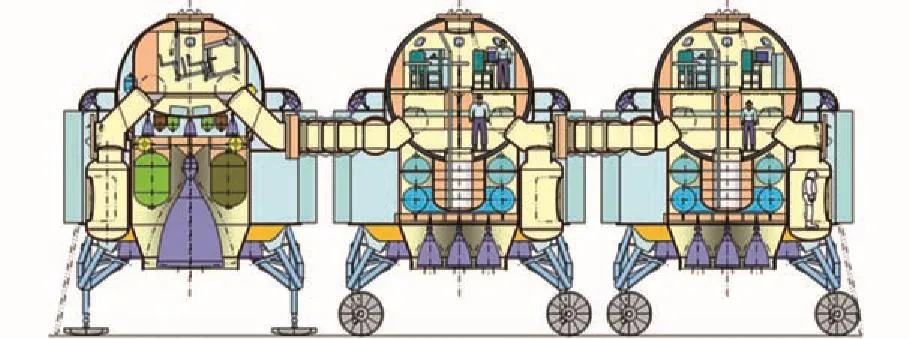
图4 火星着陆器载人型与2个货运型对接[8]Fig.4 Combination of MPL and two MCLs[8]
2.3 Howe′s可移动着陆器
2003年,香港大学Howe教授在已有自动化和机器人技术基础上提出一种行星着陆器。着陆器整体是一个可在月面移动的着陆平台,着陆平台具备推进系统并载有密封舱,但不具备从行星表面起飞的功能。着陆平台可将密封舱着陆于月面并在月面上将密封舱送往指定地点。着陆器采用4摇臂8轮方式进行月面移动,能通过崎岖地形和山坡。着陆平台吊挂密封舱的机构可以绕着陆器的纵轴进行小幅旋转从而调整六边形密封舱的指向。图5和图6分别为着陆器收拢和移动状态示意图[9]。
从国外移动式着陆器的发展来看,移动式着陆器其核心就是具备移动系统的载人着陆装置。即在传统的着陆器上考虑增加移动系统,使着陆器在具备着陆、起飞能力的同时还具备移动能力。因此移动式着陆器的关键在于移动系统的设计,尤其对于移动-着陆一体化设计的系统而言,移动系统不但要满足月面高效移动的需求,还要具备支持月面稳定软着陆的能力,需要进行优化设计,当然移动式着陆器还要具备常规着陆器所必须具备的常规功能。
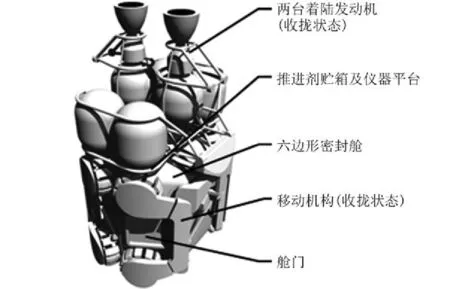
图5 Howe′s可移动着陆器收拢状态[9]Fig.5 Furled status of mobile lander designed by Howe[9]

图6 Howe′s可移动着陆器移动状态[9]Fig.6 Mobile status of mobile lander designed by Howe[9]
3 轮腿式载人月面着陆器总体方案
根据未来载人月球探测的任务需要以及载人月面着陆器的发展趋势,设计了一种轮腿式可移动载人月面着陆器方案,用于支持载人登月任务和月球基地任务中月面着陆、月面机动、月面起飞、月球基地构建与运营等任务的执行。
3.1 适用任务分析
移动式载人月面着陆器可支持载人登月任务和月球基地任务,主要体现在三个方面:
3.1.1 长距离探测
移动式载人月面着陆器可支持长距离的探测任务。以往固定式月面着陆器配合月球车的探测模式,探测过程以月面着陆器为中心,进行周边固定范围内的往返探测。假设任务周期为7天,航天员平均行走速度假设为va=1 km/ h,月球车平均行驶速度为vv=10 km/ h,参考Apollo计划航天员出舱作业时间为8 h[1],同时考虑月球车故障状态下,航天员通过步行可以返回月面着陆器的情况,如图7所示,则最远探测距离D约满足公式(1)[10]。
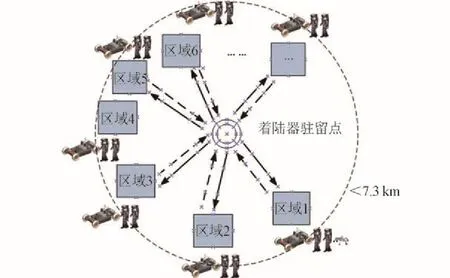
图7 七天任务固定式着陆器配合月球车的探测过程Fig.7 Exploration process with immobile lander and lunar rover in 7 days

即航天员只能在以月面着陆器为中心的7.3 km的半径内活动。
采用移动式载人月面着陆器,即具备了一个可移动的驻留点,航天员不必进行往返重复探测。假设航天员出舱作业8 h,休息8 h,月面着陆器移动行进8 h,如图8所示,则7天的可移动距离约为:10 km/ h×8 h×7=560 km,极大地增加了月球探测的贯穿距离,同时,由于着陆器时刻与航天员在一起,遇到应急情况,也可随时搭载航天员实现起飞返回,确保任务的安全性。
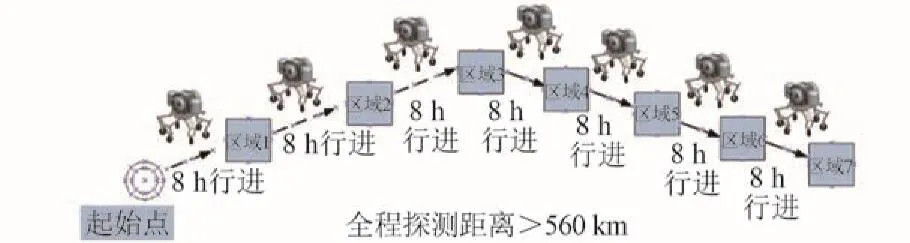
图8 七天任务移动式着陆器探测过程Fig.8 Exploration process with mobile lander in 7 days
3.1.2 月球基地建造
对于月球基地的构建有很多种方法,其中利用移动式着陆器进行基地构建是一种十分有效的途径。移动式着陆器具有密封舱体,可直接作为月球基地的舱段,多个着陆器落月后可以通过自身机动能力和高低姿态调节能力,实现聚合组装。对于后续航天员执行月球探测任务,可通过移动式载人着陆器实现月面着陆,并通过载人着陆器实现与月球基地的对接,使航天员直接进入月球基地,如图9[10]。
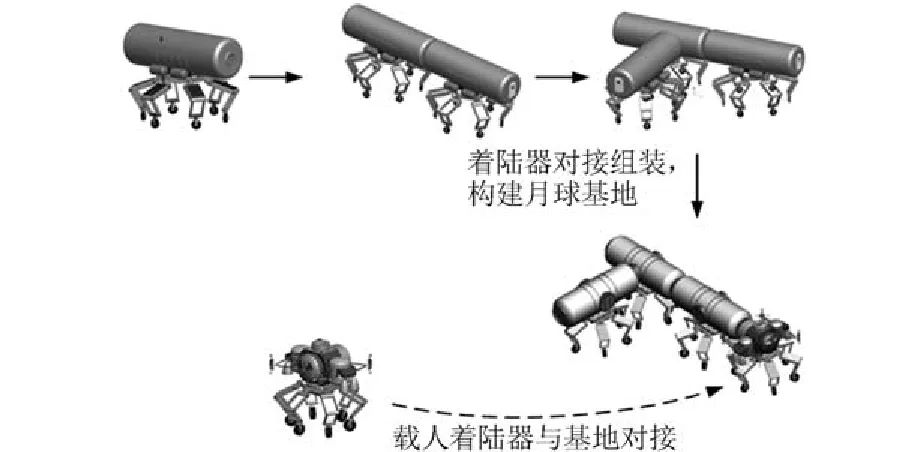
图9 移动式着陆器构建基地Fig.9 The process of lunar base construction by mobile lander
3.1.3 月球基地废弃物清理
在月球基地建造与运营任务中,着陆器往返月球将是一项十分频繁的工作,月球基地附近将设置着陆场用于着陆器着陆和起飞。
在着陆器着陆于月球基地着陆场并将携带的货物以及载荷卸载之后,或者航天员乘坐上升级返回之后,着陆器的下降级将留在着陆场成为废弃物。在基地建造和运营的过程中,将需要数次着陆任务,若不进行清理,则废弃物将在着陆场不断积累,占用着陆区资源。
如使用固定着陆器则必须要使用运输车辆、吊车等设备进行吊装和运输作业(如图10),将着陆器下降级(或剩余部分)运往更远的区域存放。月面设施至少需要1台大型运输机和1台起重机。
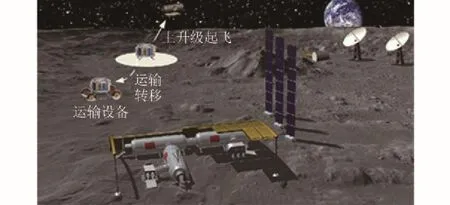
图10 固定着陆器剩余部分运输示意图Fig.10 Assumption of clearing away the rest module of immobile lander
如采用移动式着陆器,则着陆器具备一定移动能力,着陆器可自行或在其它车辆的牵引下前往存放区域,简化了基地配置的操作内容,如图11。
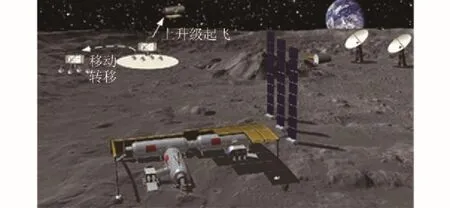
图11 移动式着陆器移动转移示意图Fig.11 Assumption of the rest module of mobile lander moving away
3.2 月面着陆器方案设计
着陆器月面着陆,需要非常大的速度增量来完成制动减速、下降着陆等过程,需要消耗大量的推进剂。而为了避免最后软着陆过程出现大载荷的着陆冲击,需要尽量减轻着陆质量。因此,在着陆器设计上整体分为三级。在发射状态下,自下而上分别是制动级、着陆移动级和上升级,如图12所示。
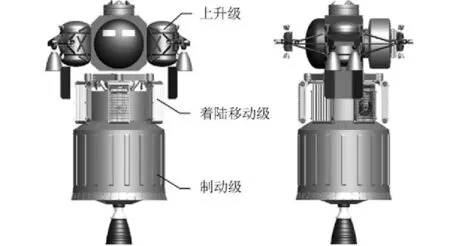
图12 移动式月面着陆器整器Fig.12 Design of the integral mobile lunar lander
1)制动级
采用一套液氧煤油推进系统,负责月面着陆器的近月制动、动力下降主减速段减速。着陆器制动级顶端通过适配器与着陆移动级连接,底部与运载火箭连接,如图13所示。减速任务完成后,制定级与着陆级分离,以减轻着陆质量。
2)着陆移动级
负责着陆器触月着陆过程中的吸能缓冲和承载上升级在月面进行移动;作为起飞发射平台对上升级进行支撑;配备气闸舱,提供航天员出舱的气闸功能。着陆移动级无推进剂,由气闸舱和运动底盘组成。运动底盘由6边形主框架结构、仪器舱、6套腿轮组成。主框架顶端通过适配器与上升级连接,主框架底部与制动级顶端适配器连接,如图14所示。
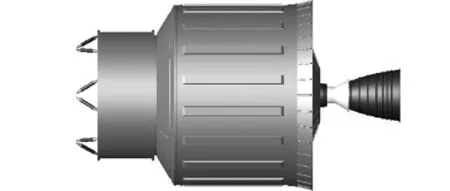
图13 移动式月面着陆器制动级Fig.13 Design of the brake module of mobile lunar lander

图14 移动式月面着陆器着陆移动级Fig.14 Design of the mobile landing module of mobile lunar lander
3)上升级
采用一套常规推进系统,负责着陆器从距月面约3 km高度自着陆过程的减速和悬停,以及自月面起飞、上升和入轨直至与载人飞船交会对接。着陆器上升级顶端具备交会对接机构(与载人飞船对接),水平向后端具备舱门,通往气闸舱,如图15所示。
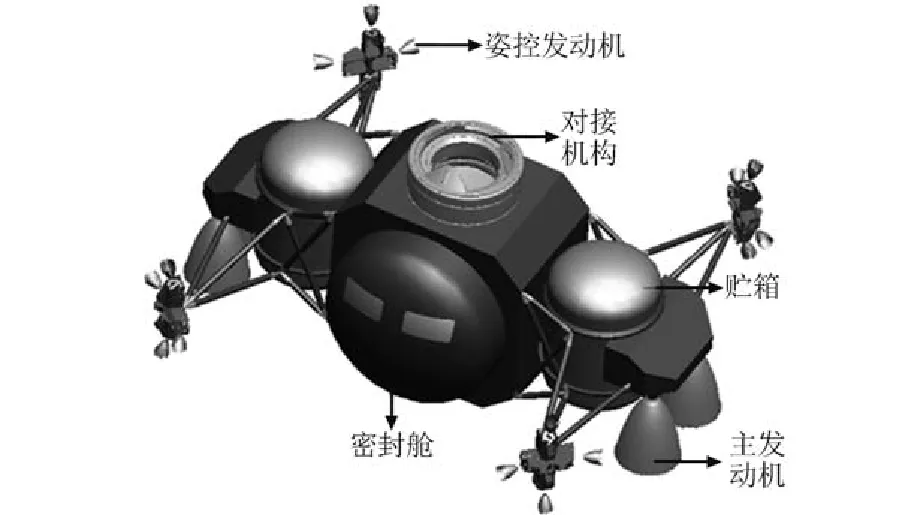
图15 移动式月面着陆器上升级Fig.15 Design of the ascent module of mobile lunar lander
3.3 任务执行状态设计
载人月面着陆器需执行月面着陆、移动、越障和月面起飞等任务,不同任务对着陆器的状态要求不同。
1)着陆状态设计
着陆月球表面前进入悬停状态后,运动底盘的6套轮腿向外展开,股部、胫部分别与前一结构成30°,足部与着陆器纵轴平行,即髋关节展开60°,膝关节展开150°,踝关节展开150°。此状态下,上升级主发动机喷口距最下端面距离为3.9 m;主发动机喷口与月面具有较充裕的空间,预计下降过程中,主发动机可工作至着陆器着陆时刻关机,充分减小着陆过程的冲击能量,如图16。
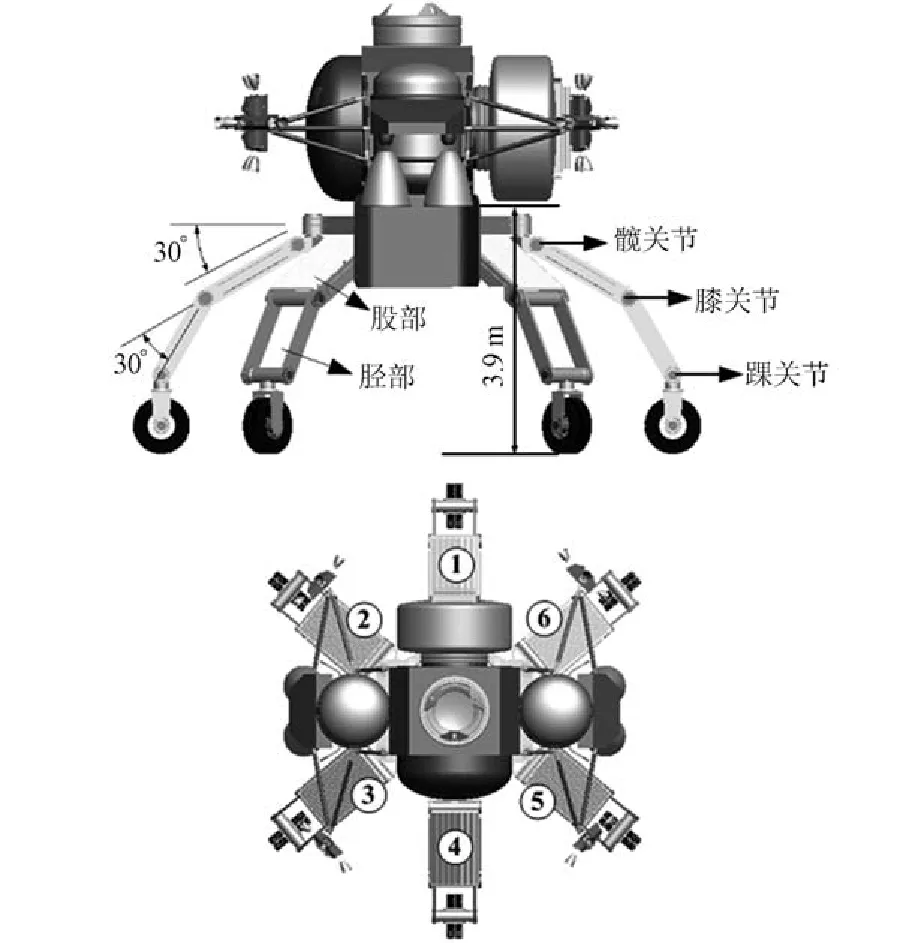
图16 着陆状态示意图Fig.16 Design of landing status
2)月面移动状态设计
(1)慢速行进
月面着陆器在崎岖及多石块、凹坑区域行进时采取该基本姿态,保持较高的底盘高度、适中的质心高度、较强的稳定性、较强的姿态调整能力、较高的关节动力裕度以及奇异性裕度。该状态下着陆移动级每个腿的股部、胫部分别与前一结构成15°、100°,足部与着陆器纵轴平行。着陆器质心高度4 m,底盘净高2.5 m,车轮在垂直于行进方向上的最大跨距5.1 m,如图17所示。
(2)快速行进
月面着陆器在坡度小于10°且平坦区域快速行进时采取该基本姿态,保持较低的质心高度、适中的稳定性以及较强的关节动力裕度和姿态调节能力。该状态下着陆移动级底盘每个腿的股部、胫部分别与前一结构成-30°、80°,足部与着陆器纵轴平行。着陆器质心高度2.7 m,底盘净空高1.2 m,车轮在垂直于行进方向上的最大跨距6.7 m,如图18所示。
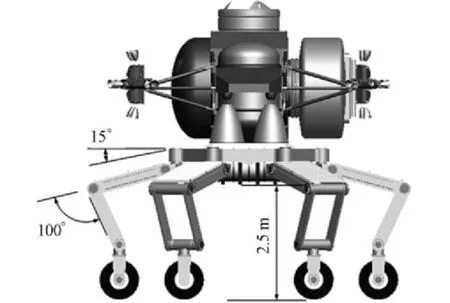
图17 慢速行进状态示意图Fig.17 Design of slow movement status
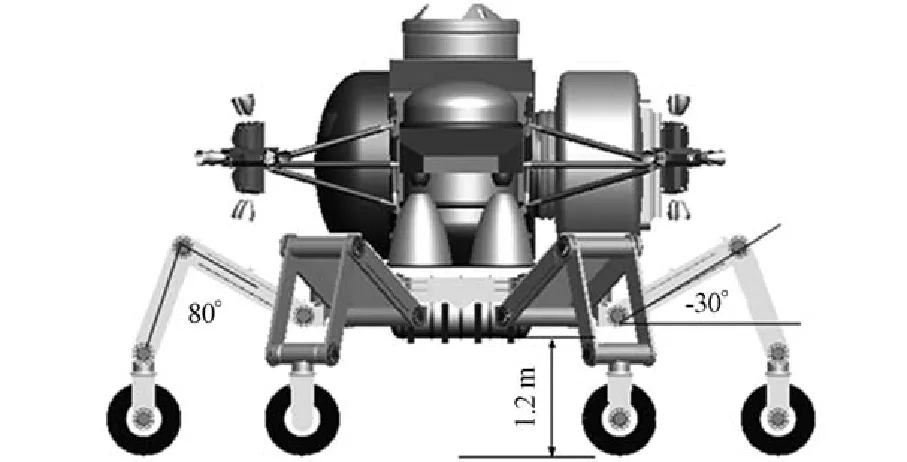
图18 快速行进状态示意图Fig.18 Design of fast movement status
3)攀爬障碍
月面着陆器最高可攀爬4 m高水平台阶,攀爬过程如图19所示。
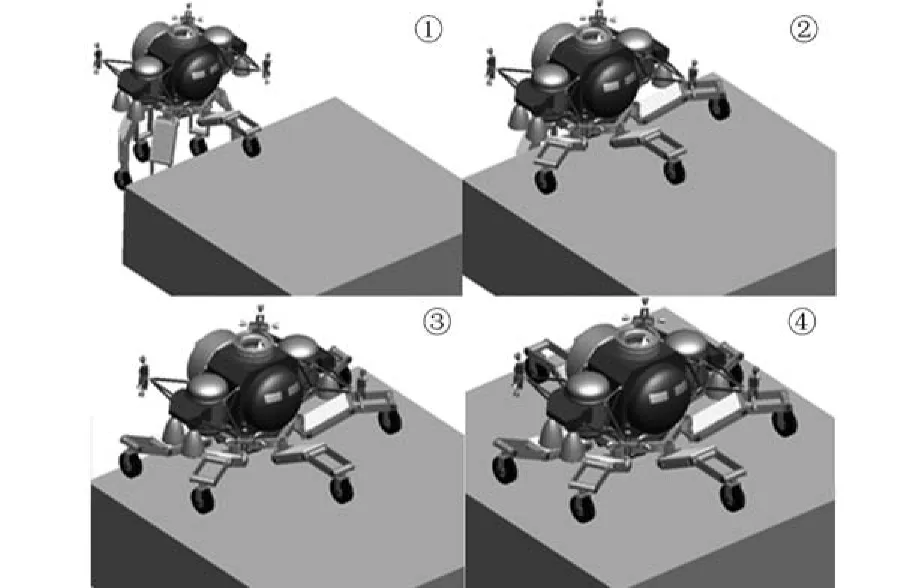
图19 攀爬水平台阶过程示意图Fig.19 Design of status to climb steps
4)月面起飞状态
该状态着陆器着陆移动级底盘姿态与着陆状态相同,气闸舱通道与上升级分离后,在预紧力的回复作用下,经过双平行机构的导向向后侧移动350 mm,与上升级保持安全距离,如图20。
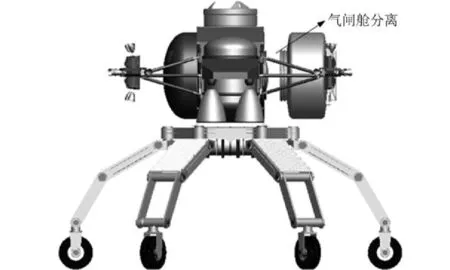
图20 上升级起飞状态示意图Fig.20 Design of ascent module ascending status
4 关键技术
移动式载人月面着陆器涉及的关键技术很多,其中主要的可归纳为以下几个方面:
1)月面复杂环境机动技术
在月球表面进行移动,需考虑适应月面复杂环境要求,满足作业机动能力需求,特殊作业活动机动要求等约束条件。月面复杂环境机动技术的内涵与所采取的运动技术方式有密切关系。基于轮腿的移动式载人月面着陆器的机动技术应重点研究地形探测与重构技术、避障技术、人机交互技术、自成像图像分割技术、关节控制实现技术、柔性结构控制技术、高效运动规划技术等内容,确保在人控和自主的情况下可实现快速、高效的月面机动。
2)高效燃料电池技术
移动式月面着陆器运动系统采用的能源应具有高比功率的特性,以满足较大负载下运动功率需求。在各类能源技术途径之中,燃料电池系统是构建移动式着陆器的重要途径之一。燃料电池具有多种实现形式,如磷酸燃料电池、熔融碳酸盐燃料电池、固态氧化物燃料电池、碱性燃料电池以及质子交换膜电池等等。其中质子交换膜燃料电池具有体积小、结构紧凑的优点,在军事及航天领域具有明显的优势。其所涵盖的质子交换膜电池的高效散热与废热循环利用技术、水管理技术、高效膜电极技术、动态功率跟踪与调节技术以及对优化飞行器系统密切相关的环-热-电一体化技术都是应该重点关注的关键技术。
3)低温燃料蒸发量控制技术
月面着陆器在整个任务周期内工作环境恶劣,需要经历地面、入轨飞行、在轨飞行、星际飞行、月面多个阶段,飞行周期长、热环境复杂,直接影响到月面着陆器所用低温推进剂以及燃料电池所用液氢液氧等低温工质的存储。蒸发量控制技术包括主动控制技术和被动控制技术,在工程使用上主要采用被动控制技术或者主被动混合的控制技术。基于被动技术的绝热方案具有结构重量较小、系统简洁的特点,适合于短期任务;而对于长期(大于30天)任务,蒸发量仍可观。对于月面着陆器,尤其是在月面长期工作的基于氢氧燃料电池的移动系统而言,技术水平仍需进一步提高。同时,为更加有效地实现长期任务的低温燃料蒸发量控制,主动控制技术的研究也十分重要,且主动控制技术是实现“零蒸发”控制的必要手段,应予以关注。
4)基于轮腿系统的主动月面着陆缓冲技术
常规的固定式着陆器,如Apollo均采用溃缩吸能方式完成最终月面着陆。轮腿式月面着陆器方案需采用轮腿系统的关节进行最终着陆过程的缓冲吸能,这是一种新颖的着陆缓冲方式,对于优化系统、减小系统重量具有重要作用。轮腿系统在着陆之后,还将支撑整个着陆器以及实施月面行走。在着陆过程中除了完成缓冲吸能任务外,还必须保证各结构、机构以及车轮的可靠性和安全性。轮腿系统理论上具备利用关节主动控制实现着陆阻尼的效果,但其控制规律尚需开展深入研究。
5 结论
本文提出的轮腿式可移动载人月面着陆器是一种新型的着陆器概念,可满足载人登月和月球基地任务的需求,与传统固定式着陆器配合月球车的方式相比,移动式月面着陆器的探测距离和移动时间不再受舱外服的限制,探测距离更远;轮腿式的设计不但可具备高速的移动能力,还具备高效的越障能力;此外着陆器的移动能力可以为着陆器的起飞选择更优越的地势条件,确保起飞的安全性。面对未来月球基地任务,还可以支持多个着陆器对接组装构建月球基地的需求。诸多优势可以预示,在未来的载人月球探测任务中,可移动式载人月面着陆器将成为一大亮点,并具有更广阔的应用前景,但随之而来的关键技术和核心问题也必须展开专门研究,以支持方案的深入研究和系统的研制。
参考文献(References)
[1] Lyndon B.Apollo program summary report[R].APSR-JSC-09423, 1975.
[2] 张有山,果琳丽,王平,等.新一代载人月面着陆器发展趋势研究[J].载人航天, 2014, 20(4):353-358.ZHANG Youshan, GUO Linli, WANG Ping, et al.Study on the development trend of new generation Manned Lunar Lande [J].Manned Spaceflight, 2014, 20(4):353-358.(in Chinese)
[3] Benton Sr M G, Caplin G, Reiley K, et al.Boeing design trades in support of the NASA altair lunar lander concept definition[C]/ / AIAA SPACE 2008 Conference&Exposition 9-11 September 2008, San Diego, California.
[4] Benton Sr M G, Donahue B, Caplin G, et al.Configuration options to maximize lunar surface reuse of altair lander structure and systems[C]/ / AIAA SPACE 2009 Conference&Exposition 14-17 September 2009, Pasadena, California.
[5] Donahue B B, Caplin G, Smith D B, et al.Lunar lander concepts for human exploration[C]/ / AIAA SPACE 2006 Conference&Exposition 19-21 September 2006, San Jose, California.
[6] Birckenstaedt B M, Hopkins J, Kutter B F, et al.Lunar lander configurations incorporating accessibility, mobility, and centaur cryogenic propulsion experience[C]/ / AIAA 2006 19-21 September 2006, San Jose, California.
[7] Benton Sr M G.Conceptual design of crew exploration lander for asteroid ceres and saturn moons rhea and iapetus[C]/ / 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition 4-7 January 2010, Orlando, Florida.
[8] Benton Sr M G.Conceptual space vehicle architecture for human exploration of mars, with artificial gravity and mini-magnetosphere crew radiation shield[C]/ / AIAA SPACE 2012 Conference&Exposition 11-13 September 2012, Pasadena, California.
[9] Marc M.Cohen.Mobile lunar base concepts[C]/ / Space technology and application international forum-STAIF 2004.
[10] 梁鲁,张志贤,果琳丽,等.可移动式月球着陆器在载人月球探测活动中的任务分析[J].载人航天, 2015, 21 (5):472-478.LIANG Lu,ZHANG Zhixian,GUO Linli, et al.Task analysis of mobile lunar lander in crewed lunar exploration missions [J].Manned Spaceflight, 2015, 21(5):472-478.(in Chinese)
Conceptual Design of Manned Lunar Lander with Wheel-Legged Mobile System
ZHANG Zhixian,LIANG Lu,GUO Linli*,YE Peijian
(Institute of Manned Space System Engineering,China Academy of Space Technology,Beijing 100094,China)
Abstract:In order to expend the maneuvering range and enhance the capability of lunar exploration,the conceptual design of manned lunar lander with wheel-legged mobile system was presented.The design combined the capabilities of lunar lander and lunar rover,and it had the advantages of wheeled mobile system to move fast and legged mobile system to cross obstacle effectively.It could perform the missions of lunar landing,ascending,long-distance movement,construction and maintenance of lunar base,so as to meet the needs of manned lunar exploration and lunar base.The key technologies of manned lunar lander with wheel-legged mobile system were presented to provide reference for further study in the future.
Key words:wheel-legged;mobile system;manned lunar lander
*通讯作者:果琳丽(1975-),女,博士,高级工程师,研究方向为载人深空探测,E-mail:rzltbgd@sina.com.cn
作者简介:张志贤(1983-),男,博士,高级工程师,研究方向为载人月球探测,虚拟仿真等。E-mail:mnzzx@163.com
收稿日期:2015-06-23;修回日期:2016-02-23
中图分类号:V4
文献标识码:A
文章编号:1674-5825(2016)02-0202-08