升力式再入弹道拉起段近似解研究
2016-05-23 09:31卓佳廖馨周华郝颖
飞行力学 2016年2期
卓佳, 廖馨, 周华, 郝颖
(中国运载火箭技术研究院 研究发展中心, 北京 100076)
升力式再入弹道拉起段近似解研究
卓佳, 廖馨, 周华, 郝颖
(中国运载火箭技术研究院 研究发展中心, 北京 100076)
摘要:针对现有方法在求解升力式再入弹道拉起段时的不足,考虑再入平面动力学模型中的引力项、离心力项的影响,推导了拉起段的速度、高度、航程变化量的近似解。通过与数值仿真校验和现有方法的对比,验证了近似解在估计精度上的改善效果。研究结果可用于升力式再入飞行器的设计评估与制导算法的设计。
关键词:升力式再入; 拉起段弹道; 近似解
0引言
以航天飞机为代表的可重复使用航天器与以通用航空飞行器(CAV)为代表的未来轨道返回飞行器一般都采用升力式再入飞行模式,飞行器在重返大气后,会采取大迎角拉起飞行的模式减缓飞行器下降的趋势并进行减速,以衔接后续的飞行段。对拉起飞行过程弹道近似解的研究,可在再入轨迹规划与制导设计中得到应用。Eggers等[1]学者基于平衡滑翔假设,对滑翔式飞行器的航程解析算法进行了研究,然而拉起飞行过程并不满足平衡滑翔约束,上述解析方法并不适用。
1958年,Chapman[2]首先提出了可用于飞船、卫星这类非弹道式再入或半弹道式再入的返回再入过程的近似解。文献[3]在仅考虑气动力影响的条件下,获得了不依赖平衡滑翔条件下的拉起弹道近似解。文献[4]获得了定常气动系数下的飞行器再入轨迹二阶解析解,但未考虑对航程的计算。文献[5-6]采用渐进匹配的方法将再入飞行动力学分为纯惯性模型与纯气动模型,分别求取解析解后再线性叠加得到合成解。文献[7]基于常值热流、平衡滑翔和常值阻力假设,获得了航天飞机再入轨迹的近似解。
本文基于大气层内平面动力学方程,在考虑了引力、离心力项影响的情况下,推导得到了大气层拉起飞行段的近似解。
1弹道分段与动力学模型
拉起飞行段从飞行器再入开始,到当地弹道倾角约为0°时结束,其示意图如图1所示。
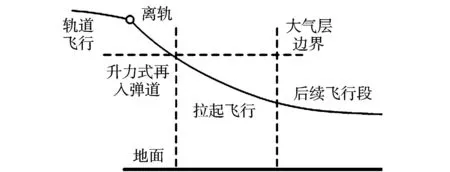
图1 拉起飞行段在升力再入弹道中的示意图Fig.1 Pull-up phase in reentry trajectory
考虑地球为均匀圆球且不自转的情况,且飞行器只在弹道平面内飞行,则飞行器大气层内无动力飞行的动力学方程为[8]:
(1)
式中:V,θ,r分别为飞行器的速度、当地弹道倾角、地心矢径;ρ,Sm,m分别为当地大气密度、参考面积、飞行器质量;CD,CL分别为飞行器的阻力系数和升力系数。大气密度ρ随高度变化的模型取指数模型,即[8]:
(2)
式中:ρSL为标准大气海平面密度;β=1/7110。
拉起过程飞行轨迹如图2所示。从大气层再入点O起算,V0,θ0分别为初始速度和初始当地弹道倾角。飞行器经历一段拉起过程,在S点到达弹道最低点,此时速度变为Vs,当地弹道倾角θ0=0°,高度下降幅度为dH,航程增量为dRs。跳跃段射程近似解的任务是根据已知的V0,θ0和其他飞行器参数求解航程dRs。
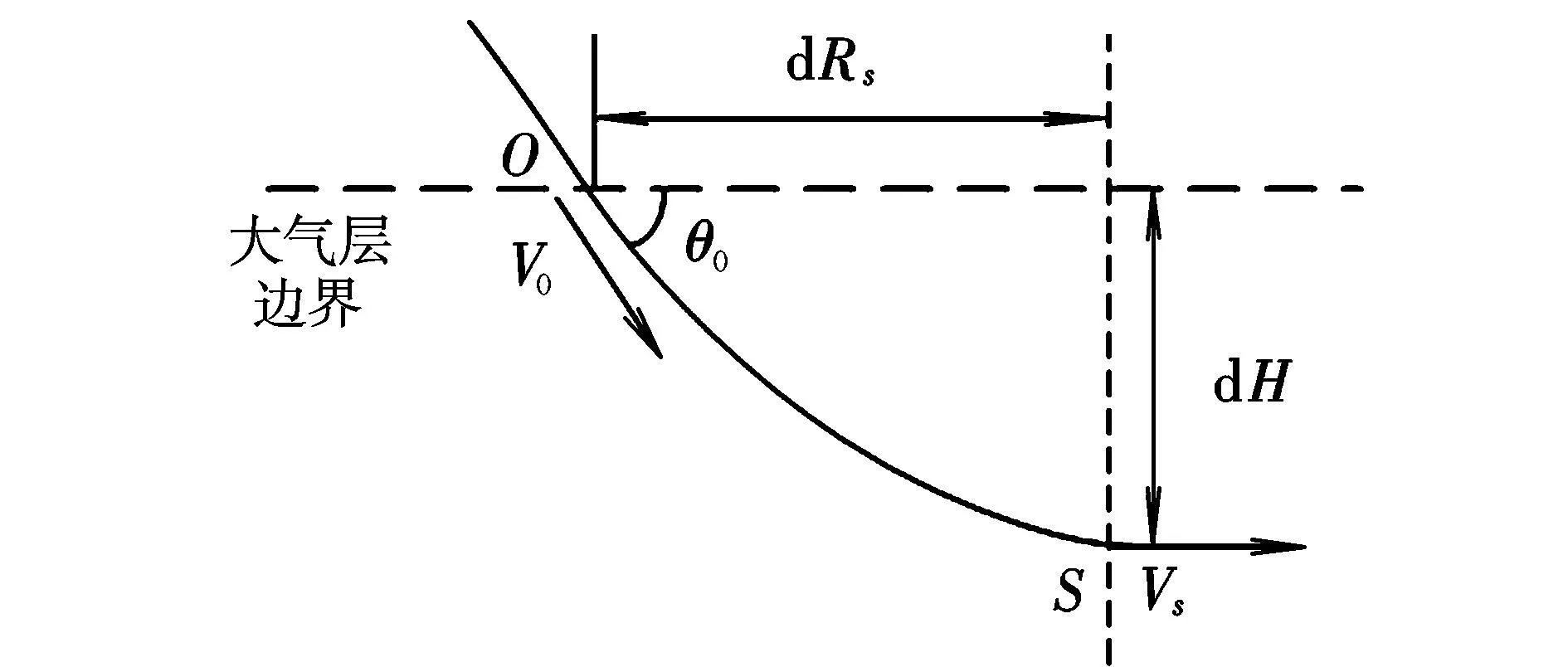
图2 拉起段飞行示意图Fig.2 Pull-up phase
2拉起过程高度差估算
对于圆球型地球,飞行器地心矢径r=H+R0,而R0恒定不变,则式(1)中第三式变为:

(3)
为简化起见,忽略式(1)第二式中的离心力项,结合式(3)整理得:
(4)
将式(3)代入上式,得:
(5)
对于高超声速飞行器,在飞行马赫数超过10后,飞行器气动力系数变化较小。这里假设飞行器在跳跃段气动力系数CL和CD不变,暂时认为g和速度V在下降过程中也不变,取再入时刻的值,则式(5)积分得到:
(6)

3拉起过程速度差值估算
在不考虑引力与离心力作用时,飞行器再入速度变化可以通过下式求解[9]:
(7)
但通过与数值仿真结果的对比,发现上式由于忽略引力、离心力的影响,低估了下降过程的速度变化值,精度较差。为了考虑引力和离心力的影响,需重新考虑式(1)给出的动力学方程。
现假设在再入飞行过程中,当地弹道倾角θ在0°左右,幅值较小。则θ≈ 0°,cosθ≈ 1,sinθ≈ 0,动力学方程前两式变为:
(8)
观察式(8),从第一式可见,速度随时间的变化率只与阻力加速度有关。通过将这两式联立,求解V变化量与θ变化量的关系,本质上是通过第二式求解下降过程中θ从θ0变为θs过程所需的时间,再将该段时间代入第一式求取速度变化量。这样可认为式(8)第二式中升力、离心力、引力各项是线性叠加的,其对速度的影响可以按比例求出。
根据上述思想,推导得到的考虑引力、离心力项情况下的速度变化估算式为:
(9)
式中:ρ取第2节中求得的高度范围内大气密度的平均值。
4拉起过程航程估算
考虑在自然坐标系下,有:
ds/dt=V
(10)
则:
(11)
将式(11)代入式(8)中的第一式,得到:
(12)
将式(2)代入上式,同时假设H=H0+sinθks,有:
(13)
式中:θk为下降过程中的平均当地弹道倾角。将上式分离变量,两边积分,同时认为0时刻航程为0,可得到:
(14)
(15)
式(15)的计算还需要确定θk,假设下降过程中当地弹道倾角随航程变化的曲线为标准二次曲线,其形式为:
(16)
式中:x为归一化的自变量,x∈[0,1]。
根据θ(0)=θ0,θ(1)=0,θ′(0)=0,求得a=-θ0,b=0,c=θ0,即:
(17)
对上式从0到1求积分,可得:
(18)
5计算结果及分析
根据本文推导得到的近似求解方法,以美国的CAV-H飞行器为例,对其高超再入条件下的拉起段弹道进行了计算,并将计算结果与数值仿真(数值仿真采用4阶龙格-库塔方法)结果、文献[3]中给出的针对相同飞行过程的解析算法(本文将这种算法作为对照方法)进行对比。
算例相关参数为[10]:m=907.186 kg,Sm=0.483 87 m2,(L/D)max=3.5,初始速度分别为6 000 m/s,5 000 m/s,初始当地弹道倾角为-5°~-3°。
图3和图4给出了不同初始条件下三种方法对波谷(即图2中的S点)速度计算结果的对比。图5和图6给出了不同初始条件下三种方法对拉起段终端高度计算结果的对比(初始高度为60 km)。
图3 初速6 000 m/s条件下终端速度计算对比Fig.3 Comparison of the terminal speed calculation at initial speed of 6 000 m/s
图4 初速5 000 m/s条件下终端速度计算对比Fig.4 Comparison of the terminal speed calculation at initial speed of 5 000 m/s
图5 初速6 000 m/s条件下终端高度计算对比Fig.5 Comparison of the terminal altitude calculation at initial speed of 6 000 m/s
图6 初速5 000 m/s条件下终端高度计算对比Fig.6 Comparison of the terminal altitude calculation at initial speed of 5 000 m/s
图7和图8给出了三种方法对拉起过程航程计算结果的对比。
图7 初速6 000 m/s条件下拉起段航程计算对比Fig.7 Comparison of the range calculation of pull-up phaseat initial speed of 6 000 m/s
图8 初速5 000 m/s条件下拉起段航程计算对比Fig.8 Comparison of the range calculation of pull-up phase at initial speed of 5 000 m/s
与文献[3]中提出的方法相比,不同之处是本文得到的近似解考虑了引力、离心力等因素的影响。从计算结果可见,本文近似方法对飞行器拉起段的速度、高度和航程估计精度与对照的方法相比有了很大的改善。
通过将本文方法的计算结果与数值仿真的准确解进行对比,可见本文近似方法在估计速度、高度方面精度较高,速度估计误差在3%以内,高度估计误差在10%以内,航程计算误差略大,主要原因是估计航程的方法引入了对当地弹道倾角随航程变化形式的假设,从而引入了较大的误差。
6结束语
本文针对升力式再入飞行的特点,在保留了引力项和离心力项的平面再入动力学模型的基础上,推导了高度、速度及航程参数的近似解。并基于美国CAV-H飞行器的基本参数,对典型飞行状态下的近似解与数值仿真结果进行了对比,验证了算法的有效性。由对比结果可知,高度、速度及航程的计算精度较现有文献提供的方法有了大幅提升。因此本文近似解可以应用于飞行器在线弹道规划、中段制导等方面。
参考文献:
[1]Eggers A J,Allen H J,Neice S E.A comparative analysis of the performance of long range hypervelocity vehicles [R].NACA RM A54L10,1955.
[2]Chapman D R.An approximate analytical method for studying entry into planetary atmospheres[R].NACA TN 4276,1958.
[3]Carter P H,Pines D J,Rudd L V.Approximate performance of periodic hypersonic cruise trajectories for global reach [R].AIAA-98-1644,1998.
[4]Vinh N X,Kim E K,Greenwood D T.Second order analytic solutions for reentry trajectories [R].AIAA-93-48354,1993.
[5]Vinh N X,Kuo Z S.Improved matched asymptotic solutions for three dimensional atmospheric skip trajectories [R].AIAA-96-34735,1996.
[6]雍恩米,陈磊,唐国金.助推-滑翔式弹道中段的近似解[J].飞行力学,2007,25(3):49-57.
[7]南英,吕学富,陈士橹. 航天飞机最优再入轨迹的近似解析解及分析[J].航天返回与遥感,1994,15(4):1-8.
[8]贾沛然,陈克俊,何力.远程火箭弹道学[M].长沙:国防科技大学出版社,2009:150-151.
[9]赵汉元.飞行器再入动力学和制导[M].长沙:国防科技大学出版社,1997:133.
[10]Jorris T R.Common aero vehicle autonomous reentry trajectory optimization [D].Ohio:Air Force Institute of Technology,2007.
(编辑:姚妙慧)
Study on approximate solution of lift reentry trajectory pull-up phase
ZHUO Jia, LIAO Xin, ZHOU Hua, HAO Ying
(Research and Development Center, China Academy of Launch Vehicle Technology, Beijing 100076, China)
Abstract:The approximate solutions of the pull-up phase trajectories for the reentry or boost-glide vehicles are studied in this paper. To be more accurate, the gravity and centrifugal terms are both included when the solutions of height, velocity, range are derived from the planar entry equations. By comparing to numerical solution and the present method it is confirmed that it can improve the precision of estimation. The solutions can be used in performace evaluation and guidance design of lift reentry vehicles.
Key words:lift reentry; pull up phase trajectory; approximate solution
中图分类号:V412.4
文献标识码:A
文章编号:1002-0853(2016)02-0055-04
作者简介:卓佳(1986-),男,广西宾阳人,工程师,硕士,主要从事飞行力学与飞行器制导方法研究。
收稿日期:2015-03-27;
修订日期:2015-11-09; 网络出版时间:2016-01-05 16:06